AGV小车设计Word格式文档下载.docx
《AGV小车设计Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《AGV小车设计Word格式文档下载.docx(27页珍藏版)》请在冰豆网上搜索。
通常监控器可完成以下监控:
手动控制、安全装置启动、蓄电池状态、转向极限、制动器解脱、行走灯光、驱动和转向电机控制和充电接触器等。
某些AGV具有编程能力,允许小车离开导引路径,驶向某个示教地点,完成任务后路原道返问到导引路径上来
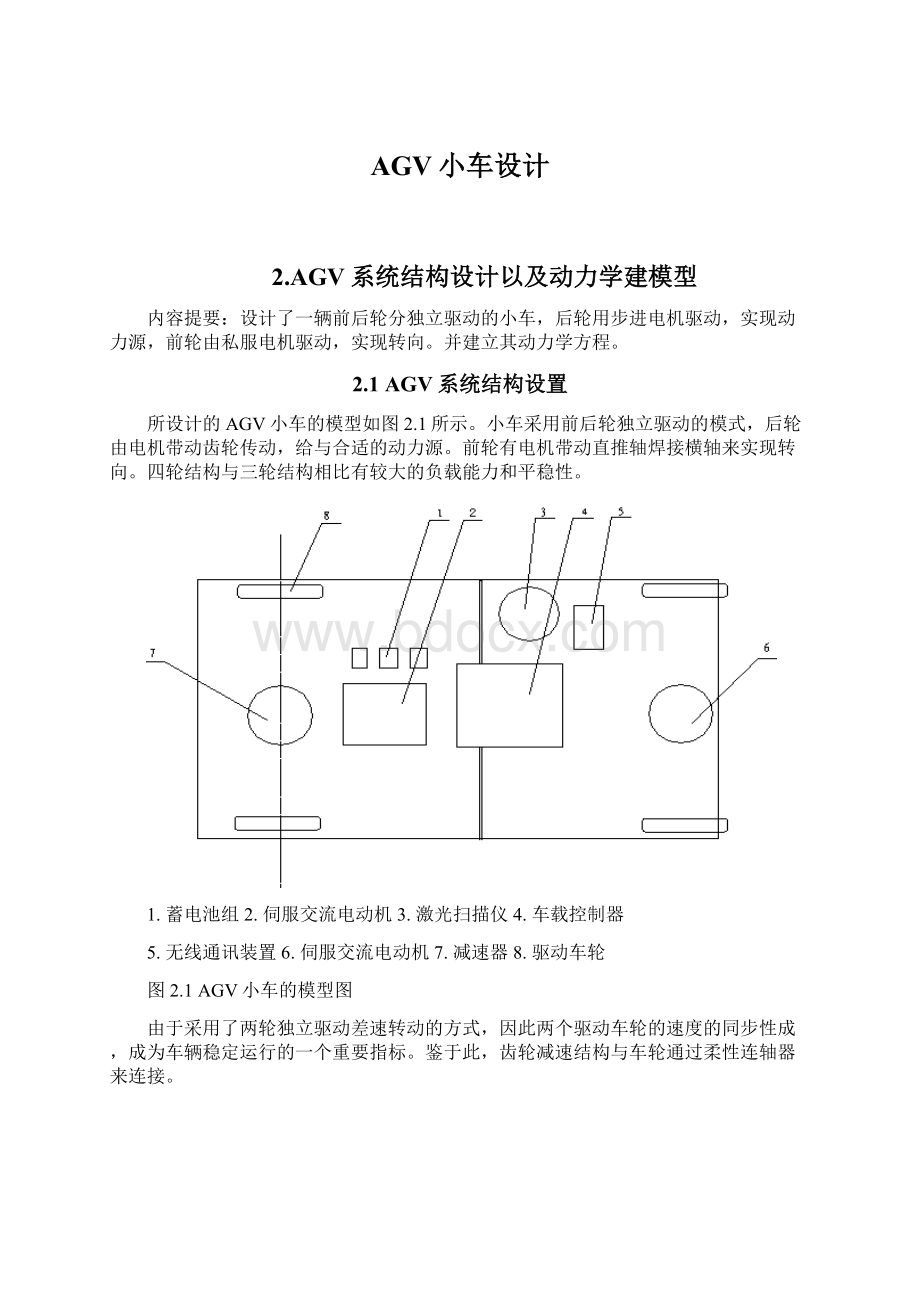
根据上述的介绍,我们可以不难看出同步行进的四轮AGV机械结构分为以下几个部分:
车体部分:
包括车架、蓄电池、驱动电机、转向电机和齿轮减速机构等,车体受到由后轮传动来的驱动力和前轮的反作用力的作用。
驱动后轮:
所受的外力可能有两部分组成。
一部分是地面的作用力:
另一部分是来自车体给于的外力。
其中这部分力包括自身的支撑反力和电机产生的等效驱动力矩等。
通过齿轮改变转速来调节速率可以得到不用的转速,从而改变AGV的的运动行进方向,已经更好的做到预定的线路跟踪。
前轴和连轴:
起到支撑作用,同时车轮和竖轴是同轴的,前轮的转动有地面给于的摩擦力也有电机传递的力矩。
2.2.1车体运动建模
车体受力的示意图见图2.2。
图中L、A为驱动左后轮、和驱动右后轮与车体的连接处。
图中的R、B为导向左前轮和导向又前轮与车架连接处的垂直点。
车体在L、R、A、和B处分别是受到图示沿X、Y方向的阻力和沿Z方向的扭矩。
C则为车体的重心,通过C建立起瞬时惯性坐标系O-XYZ,X轴则平行于L=R的连线,Z轴垂直于车体的平面。
为车体集合参数,分别表示的是车体质心的X向、Y向的速度和Z向的角速度。
在经过了上述的假设的基础之上,我们不难可以得到车体动力学方程如下:
(2.1)
(2.2)
(2.3)
上面式子中分别为车体质心的质量和转动惯量。
车体的前轮A、B处的运动方程为
(2.4)
(2.5)
(2.6)
(2.7)
(2.8)
(2.9)
(2.10)
(2.11)
车体L和R处运动的方程为:
(2.12)
(2.13)
(2.14)
(2.15)
(2.16)
(2.17)
(2.18)
(2.19)
2.2.2驱动后轮的运动建模
左后轮受力图见图2.3所示,图中瞬时惯性坐标系L-与图2.2的方向是一致的,可以认为是由O-XYZ平移到L点从而形成的坐标系,相对应,他们是车体与左轮之间大小相等方向相反的作用力(力矩)和反作用力(力矩)。
是驱动电机经过齿轮减速后传递给左轮的驱动力矩,是轴承对左轮的摩擦阻力矩,是滚动阻力矩,是地面对左轮的侧滑动摩擦力,是轴承对左轮的滚动摩擦力,是地面对车轮的扭矩摩擦力矩,是左后轮的转动角速度(为转动轴)。
左后轮动力学方程为
(2.20)
(2.21)
(2.22)
(2.23)
上式中,分别是左后轮的质量‘以及其沿着旋转轴的转动惯量、沿着轴的转动惯量和半径。
为其在L-XYZ坐标下的速度,与车体对应点的速度是同一值。
是左后轴沿轴的扭转角速度。
对于右后轮来说,传动齿轮啮合是在轴中心处,故左右受的力是相同的,因此建立类似的动力学方程为:
(2.24)
(2.25)
(2.26)
(2.27)
上述各式中,有关物理量的具体意义同对左后轮的说明类似,这里就不做过多说明了。
由于AGV速度和加速度均较小的原因,轮子的侧滑阻力很大,假设其中的。
这样看来车体将以位于左右轮轴线上的某一点为瞬时速度中心,以角速度w转动,我们根据所了解的知识,我们不难看出一点,通过左右轮转动计算,根据下图2.4所示:
即:
(2.28)
(2.29)
将以上的2个式子带入(2.14),(2.18)中可以看到
(2.30)
(2.3.1)
将代入式子(2.12)和式子(2.13)即可得
(2.32)
(2.33)
式子(2.14)和式子(2.15)可改写成
(2.34)
(2.35)
式子(2.4)至式子(2.11)变为
(2.36)
(2.37)
(2.38)
(2.39)
(2.40)
(2.41)
(2.42)
(2.43)
2.2.3车体整体的动力学模型
为了能够更好的取得车体整体的动力学模型,根据AGV的实际情况作出如下的简化:
(1)左右前轮和轴是一体的,再前行或后退的同时不打滑,只看做是纯滚动,则有:
(2)车体设计左右是对称的,则有:
(3)左轮的直径及其质量和右轮
(4)前轮左右也是一致的和后轮的大小重量以及有些不受力或比较想的部分我们可以忽略不计其的转动惯量,即:
在上述简化后的基础上,联立前述车体、左右驱动后轮的动力方程可以得到车体整体的动力学方程。
该动力学方程中可以表示为左、右轮所受的动力和左、右轮转动的角速度之间的关系。
任何一种导引方法的实现最终都归结为路径跟踪控制的问题上。
对于固定路径型的AGV由于具有体现路径的导引媒介物,通过传感器就可直接获得车体对路径的横向偏差和车体方向偏差,以这种偏差作为误差信号通过车体动力学直接对车体进行跟踪控制。
但是对于自由路径型AGV,车体对路径之偏差量的获取就要困难得多,以车体方位推算导向的自由路径AGV为例,其方位和对于路径的偏差是通过对车轮转动角度积分计算而获得,其要实现需较大的计算量和通信量。
作为一种较好的解决办法是差速驱动的自由路径控制。
其路径可简化为一系列直线段和圆弧段的组合。
只要保证左右轮的转动角速度满足给定的比例关系(即同步误差为零),AGV就能跟踪这种具有恒定半径(直线和圆弧)的路径。
车体动力学方程是实现差速驱动的理论基础之一,结合模糊控制方法,可以实现差速驱动路径跟踪过程。
2.3本章小结
动力学方程能够帮助AGV的建模、车体结构、刚度设计和路径跟踪控制提供理论依据的基础。
本章主要介绍了所设计及其制作的一辆有电机带动齿轮差动驱动后轮,前轮有电机直接控制实现转向的的四轮AGV小车,并建立了所需要的运动学方程。
3.AGV中机械部分主要零件的选取
本章主要介绍了这次AGV机械部分设计中的一些主要部件的选取。
比如说有私服驱动电动机的选取、控制转向的电动机的选取,传动齿轮的选取等。
介绍其选取方法只要结构及其主要的参数问题。
3.1伺服驱动电动机的选取及其参数
伺服驱动电动机是用来控制后轮驱动行进的原动力机构,是支持和为整个车体提供动力的元件。
它的选取关系到车体的运动快慢及其能够产生多大的扭矩,多大的驱动力。
在这次电机部分的选取中,结合老师的指导及其研究找个了下面这个较为合适的私服电动机作为后轮的驱动电机。
其外观如图3.1。
图3.1伺服电机外观图
由于这次车体不是很大,外形尺寸:
长*宽*高:
800mm*590mm*350mm;
能够承受的重物也不是很大,大概再10斤到50斤左右的工件,所以为了节省原材料和不必要的能源浪费,所以电动机的选取尤为重要,此次我选取了额定功率为1.5KW的电机足以保证给车体提供驱动动力及其达到不必要的浪费。
选取的驱动电机为ACH-13150A(1500W);
而转向需要的动力不必这么大,所以转向电机选择的功率相对较小些,选取的转向电机为JSF60-40-30-DF-1000
所以选取的两个电机则均为方形;
驱动电机:
边长为260MM,圆柱形;
外径为
电压等级:
L-220VA额定功率:
1500W
位置传感器:
M-光学编码器电机额定转速:
1500rpm
冷却方式:
N-自然空冷外形:
方形
转向电机:
边长为142MM,圆柱形,外径为Φ61
L-72VA额定功率:
400W
电机额定转速:
3000rpm
3.1.1电机的结构图及其主要参数的选取
选取的ACH-13150A(1500W)交流私服电动机的结构示意图如图3.3。
图3.3伺服电机结构示意图
选取的JSF60-40-30-DF-1000交流私服电动机的结构示意图如图3.4。
图3.4伺服电机示意图
驱动电机其主要参数如表3-1。
表3-1伺服电机参数表
型号
ACH-13150A(1500W)
额定功率(KW)
0.6
1
1.5
2
相数、线电压(V)
3相220V
额定转速(rpm)
最高转速(rpm)
1750rpm
最高机械转速(rpm)
2000rpm
额定转矩(N.m)
5.8
9.6
14
19
最大转矩(N.m)
17
29
42
57
额定线电流(A)
3
4.8
7.2
9.3
转子惯性(Kg.c)
12
23
34
45
电
机
外
型
尺
寸
(mm)
L
160
210
274
310
L1
55
H2
5
H3
D2
110
D3
22
D4
165
D5
9
D6
145
光轴或键连结,如采用
键连接,则
键尺寸为(mm)
L3
L4
41
T
8
H1
H4
18
转子位置反馈:
2500线、5000线光学编码器、旋转变压器可选制动器:
带制动电机总长加25mm制动器电压:
直流24V
 升级会员
升级会员 