JBC Botball小学组例程Word文档格式.docx
《JBC Botball小学组例程Word文档格式.docx》由会员分享,可在线阅读,更多相关《JBC Botball小学组例程Word文档格式.docx(23页珍藏版)》请在冰豆网上搜索。
ao();
//关闭所有电机
}
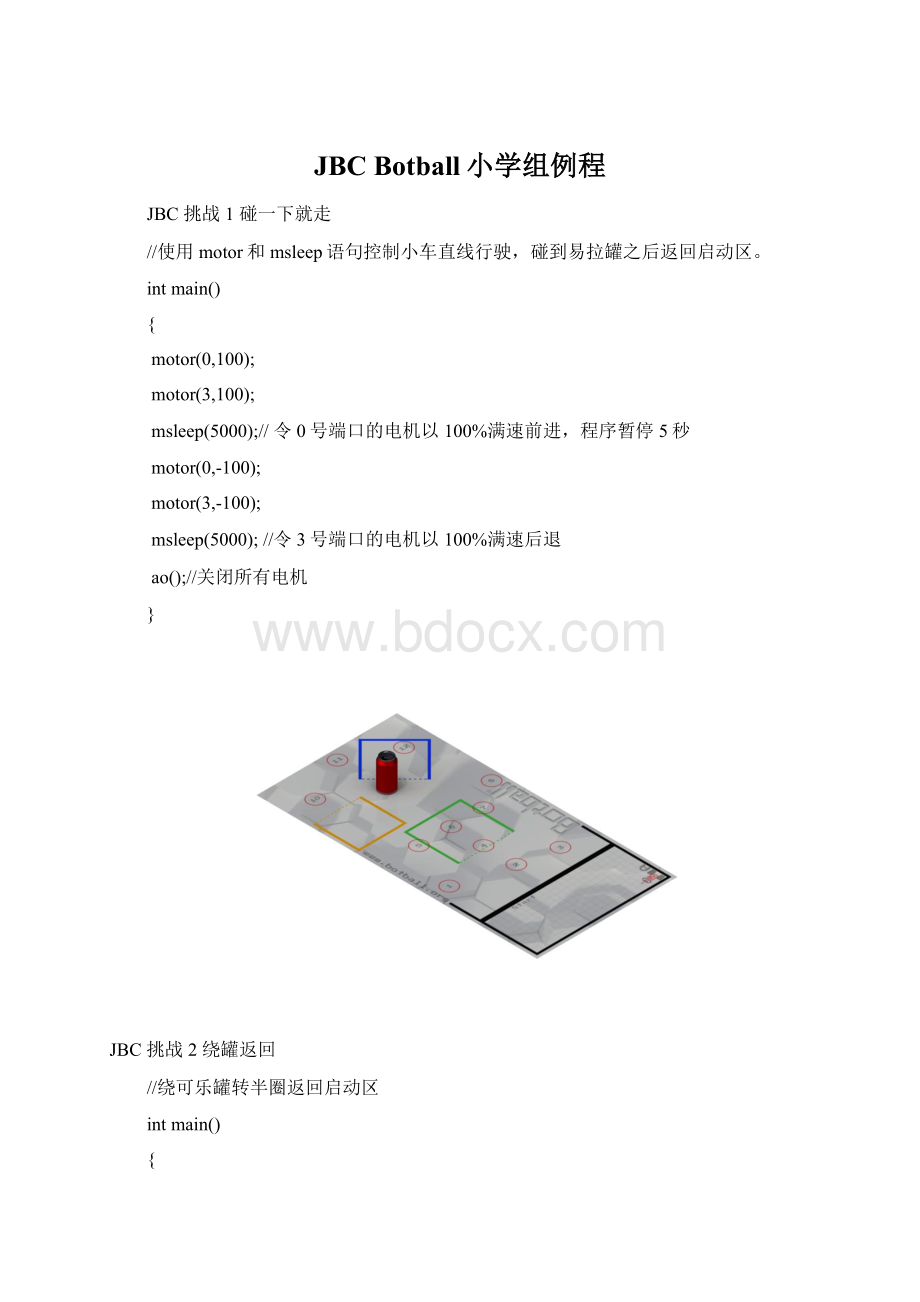
JBC挑战2绕罐返回
//绕可乐罐转半圈返回启动区
//0号和3号电机满速前进(直行)
motor(3,0);
msleep(1500);
//0号电机满速前进,3号电机停止运行(左转弯)
//直行
//左转弯
//返回启动区
JBC挑战3精确停靠
//使用motor语句以及msleep语句,让小车按照预定路线行驶,准确停在黄色、蓝色以及绿色库中。
绿色库:
msleep(4000);
//结束
蓝色库:
motor(0,50);
//0号电机以50%的速度前进,3号舵机以100%的速度前进1.5秒(右转弯)
msleep(3000);
黄色库:
msleep(1000);
}
JBC挑战4蛇形穿罐
//准确地使用语句让小车完成任务,使用函数让代码更加清晰易读
voiddrive_turn_left();
voiddrive_turn_right();
voiddrive_forward();
drive_turn_left();
drive_forward();
drive_turn_right();
drive_turn)right();
msleep(4500);
voiddrive_turn_left()
msleep(1200);
//左转弯
voiddrive_turn_right()
motor(0,0);
//右转弯
voiddrive_forward()
//直走
JBC挑战5全力装载
//在挑战3的基础之上加上机械臂来收集可乐瓶
进入绿色库:
进入蓝色库:
进入黄色库:
JBC挑战6疯狂推罐机
//机器人在比赛途中可以驶出场地纸,可以设计一个长机械臂,从场地后将罐子推到启动区
voiddrive_left();
voiddrive_right();
drive_right();
drive_left();
msleep(7000);
voiddrive_left()
voiddrive_right()
JBC挑战7沿线走
//使用传感器控制小车前进
intmain(){
while
(1){
if(analog10(0)>
=512)//在0号端口接入巡线传感器
{
mav(0,750);
mav(3,100);
msleep(200);
//如果非黑线,左转
}
elseif(analog10(0)<
512)
mav(0,100);
mav(3,750);
//如果黑线,右转
}
JBC挑战8清扫道路
//用触碰传感器和巡线传感器移动,控制舵机抓取一个易拉罐
enable_servo
(1);
//打开1号舵机
enable_servo(3);
//打开3号舵机
set_servo_position(1,1000);
//控制好机械爪的高度
set_servo_position(3,1500);
//打开机械爪
while(digital(15)!
=1)//巡线前进直到15号端口上的触碰传感器被按下
=512)//如果不是黑线左转
512)//如果黑线右转
ao();
//当端口15度数为“0”,电机停止运行
set_servo_position(3,440);
//机械爪抓取物品
//全速后退
disable_servos();
ao();
JBC挑战9直线行驶
//准确调整两个轮子的转速保持机器小车直线前进
//全速前进
(使用motor控制速度受电量影响,使用mav函数控制电机能够得到更稳定的结果)
JBC挑战10蛇形
//蛇形主要挑战灵活运用舵机的控制,通过控制舵机的转速来完成锐角弯和钝角弯。
msleep(500);
motor(3,95);
//使用motor、mav等函数到达指定位置
msleep(2000);
msleep(2500);
motor(3,50);
JBC挑战11沿着外缘走
//同挑战沿线走,适当调整巡线传感器的位置,适当
 升级会员
升级会员 