Get清风FANUC系统数控机床参数.docx
《Get清风FANUC系统数控机床参数.docx》由会员分享,可在线阅读,更多相关《Get清风FANUC系统数控机床参数.docx(57页珍藏版)》请在冰豆网上搜索。
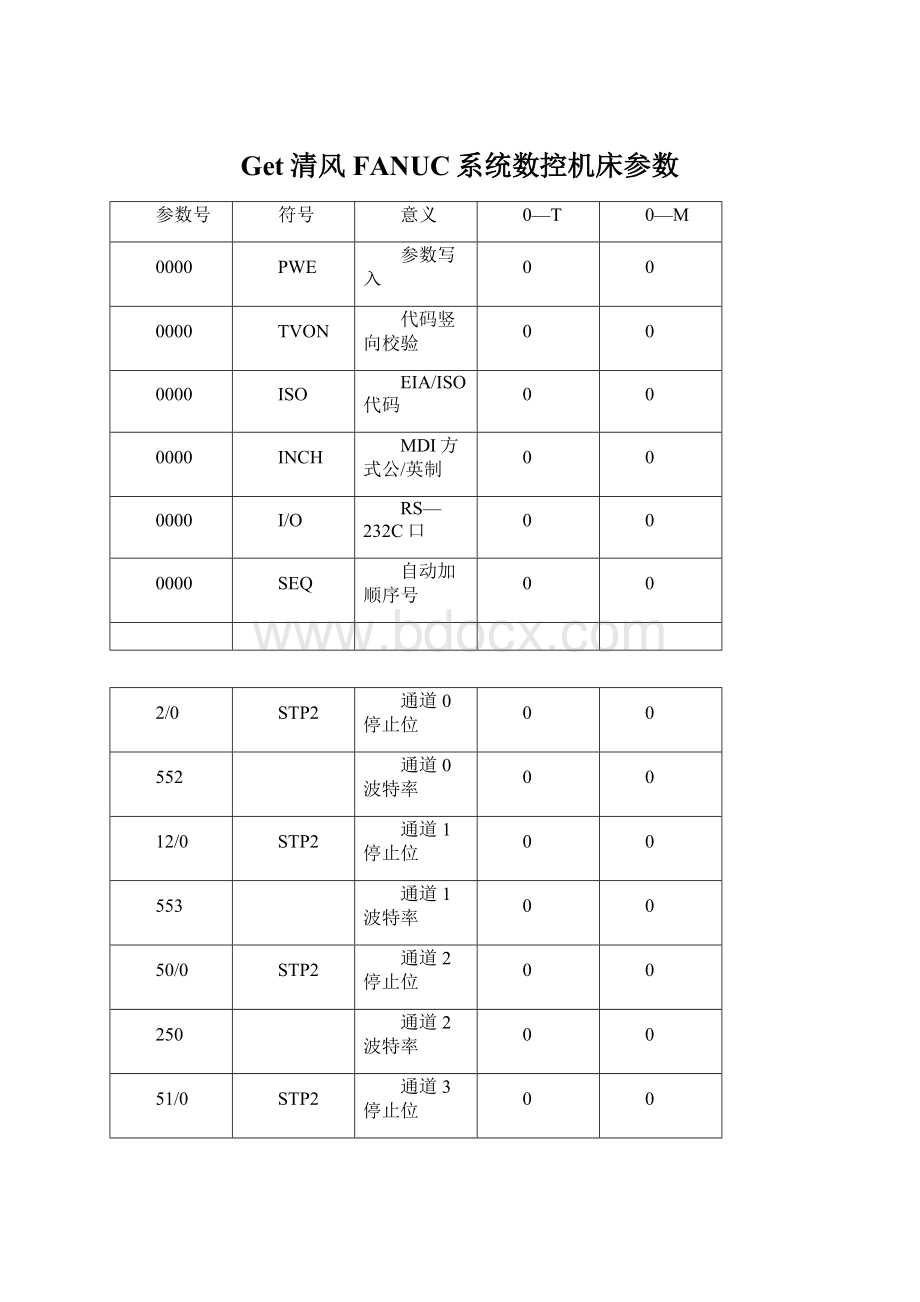
Get清风FANUC系统数控机床参数
参数号
符号
意义
0—T
0—M
0000
PWE
参数写入
0
0
0000
TVON
代码竖向校验
0
0
0000
ISO
EIA/ISO代码
0
0
0000
INCH
MDI方式公/英制
0
0
0000
I/O
RS—232C口
0
0
0000
SEQ
自动加顺序号
0
0
2/0
STP2
通道0停止位
0
0
552
通道0波特率
0
0
12/0
STP2
通道1停止位
0
0
553
通道1波特率
0
0
50/0
STP2
通道2停止位
0
0
250
通道2波特率
0
0
51/0
STP2
通道3停止位
0
0
251
通道3波特率
0
0
55/3
RS42
RemoteBuffer口RS232/522
0
0
390/7
NODC3
缓冲区满
0
0
1/0
SCW
公/英制丝杠
0
0
ZM
回零方向
0
0
ADW
轴名称
0
ADW
轴名称
0
LIN
3,4轴,回转轴/直线轴
0
388/1
ROAX
回转回转轴循环功能
0
388/2
RODRC
绝对指令近距离回转
0
388/3
ROCNT
相对指令规算
0
788
回转轴每转回转角度
0
11/2
ADLN
第4轴,回转轴/直线轴
0
398/1
ROAX
回转轴循环功能
0
398/2
RODRC
绝对指令近距离回转
0
398/3
ROCNT
相对指令规算
0
788
回转轴每转回转角度
0
860
回转轴每转回转角度
0
0
500—503
INPX,YZ,4
到位宽度
0
0
504—507
SERRX,Y,Z,4
运动时误差极限
0
0
508—511
GRDSX,Y,Z,4
栅格偏移量
0
0
512—515
LPGIN
位置伺服增益
0
0
517
LPGIN
位置伺服增益〔各轴增益〕
0
0
518—521
RPDFX,Y,X,4
G00速度
0
0
522—525
LINTX,Y,Z,4
直线加/减速时间常数
0
526
THRDT
G92时间常数
0
528
THKFL
G92X轴的最低速度
0
0
527
FEDMX
F的极限值
0
0
529
FEEDT
F的时间常数
0
0
530
FEDFL
指数函数加减速时间常数
0
0
533
RPDFL
手动快速成移动倍率的最低值
0
0
534
ZRNFL
回零点的低速
0
0
535—538
BKLX,Y,Z,4
反向间隙
0
0
593—596
STPEX,Y,Z,4
伺服轴停止时的位置误差极限
0
0
393/5
快速倍率为零时机床移动
0
0
10/7
APRS
回零点后自动设定坐标系
0
0
2/1
PPD
自动设坐标系相对坐标值清零
0
24/6
CLCL
手动回零后去除局部坐标系
0
28/5
EX10D
坐标系外部偏移时刀偏量的值〔×10〕
0
708—711
自动设定工件坐标系的坐标值
0
735—728
第二参考点
0
0
780—783
第三参考点
0
0
784—787
第四参考点
0
0
8/6
OTZN
Z轴行程限位检查否
0
15/4
LM2
第二行行程限位
0
24/4
INOUT
第三行行程限位
0
57/5
HOT3
超行程—LMX—+LMZ有效
0
65/3
PSOT
回零点前是否检查行程限位
0
0
700—703
各轴正向行程
0
0
704—707
各轴负向行程
0
0
15/2
COTZ
超行程—LMX—+LMZ有效
0
20/4
LM2
第二行行程限位
0
24/4
INOUT
第三行行程限位
0
743—746
第二行行程正向限位
0
747—750
第二行行程反向限位
0
804—806
第三行行程正向限位
0
807—809
第三行行程反向限位
0
770—773
第二行行程正向限位
0
774—777
第二行行程反向限位
0
747—750
第三行行程正向限位
0
751—754
第三行行程反向限位
0
760—763
第四行行程正向限位
0
764—767
第四行行程反向限位
0
1/6
RDRN
空运行时,快速移动指令是否有效
0
0
8/5
ROVE
快速倍率信号ROV2〔G117/7〕有效
0
49/6
NPRV
不用位置编码器实现主轴每转进给
0
0
20/5
NCIPS
是不进行到位检查
0
0
4—7
参考计数器容量
0
0
4—7
检测倍比
0
0
APC
绝对位置编码器
0
0
35/7
ACMR
任意CMR
0
0
SPTP
用别离型编码器
0
0
100—103
指令倍比CMR
0
0
8/7
EILK
Z轴/各轴互锁
0
0
TFIN
FIN信号时间
0
0
TMF
M,S,T读信号时间
0
0
12/1
ZILK
Z轴/所有轴互锁
0
31/5
ADDCF
GR1,GR2,DRN地址
0
252
复位信号扩展时间
0
0
1/1
PROD
相对坐标显示是否包括刀补量
0
0
2/1
PPD
自动设坐标系相对坐标清零
0
0
15/1
NWCH
刀具磨损补偿显示W
0
0
18/5
PROAD
绝对坐标系显示是否包括刀补量
0
23/3
CHI
汉字显示
0
0
28/2
DACTF
显示实际速度
0
0
DSP
第3,4轴位置显示
0
35/3
NDSP
第4轴位置显示
0
38/3
FLKY
用全键盘
0
0
48/7
SFFDSP
显示软按键
0
0
60/0
DADRDP
诊断画面上显示地址字
0
0
60/2
LDDSPG
显示梯形图
0
0
60/5
显示操作监控画面
0
0
64/0
SETREL
自动设坐标系时相对坐标清零
0
0
77/2
伺服波形显示
0
0
389/0
SRVSET
显示伺服设定画面
0
0
389/1
WKNMDI
显示主轴调整画面
0
0
10/4
PRG9
O9000—O9999号程序保护
0
0
15/7
CPRD
小数点的含义
0
0
28/4
EXTS
外部程序号检索
0
0
29/5
MABS
MDI—B中,指令取决于G90/G91设定
0
389/2
PRG8
O8000—O8999号程序保护
0
0
394/6
WKZRST
自动设工件坐标系时设为G54
0
PML
螺补倍率
0
0
712—715
螺补间隔
0
756—759
螺补间隔
0
1000,2000
3000,4000
补偿基准点
0
0
1001-1128
2001-2128
3001-3128
4001-4128
补偿值
0
0
1/3
TOC
复位时去除刀长补偿矢量
0
0
1/4
ORC
刀具补偿值〔半径/直径输入〕
0
8/6
NOFC
刀补量计数器输入
0
10/5
DOFSI
刀偏量直接输入
0
13/1
GOFU2
几何补偿号〔由刀补号或刀号〕指定
0
13/2
GMOFS
加几何补偿值〔运动/变坐标〕
0
14/0
T2D
T代码位数
0
14/1
GMCL
复位时是否清几何补偿值
0
14/5
WIGA
刀补量的限制
0
15/4
MORB
直接输入刀补测量值的按钮
0
24/6
QNI
刀补测量B时补偿号的选择
0
75/3
WNPT
刀尖补偿号的指定〔在几何还是在磨损中〕
0
122
刀补偿量B时的补偿号
0
728
最大的刀具磨损补偿增量值
0
729
最大的刀具磨损补偿值
0
78/0
NOINOW
用MDI键输入磨损补偿量
0
0
78/1
NOINOG
用MDI键输入几何补偿量
0
0
78/2
NOINMV
用MDI键输入宏程序变量
0
0
78/3
NOINMZ
用MDI键输入工件坐标偏移量
0
0
393/2
MKNMDI
在自动方式的停止时,用MDI键输入工件坐标偏移量
0
0
13/5
ORCM
定向时,S模拟输出的极性
TCW,CWM
S模拟M03,M04的方向
0
0
14/2
主轴转速显示
0
0
24/2
SCTO
是否检查SAR〔G120/4〕
0
0
49/0
EVSF
SF的输出
0
0
71/0
ISRLPC
串行主轴时编码器信号的接法
0
71/4
SRL2SP
用1或2个串行主轴
0
71/7
FSRSP
是否用串行主轴
0
108
G96或换档〔#3/5:
GST=1〕或模拟主轴定向〔SOR:
G120/5:
M=1〕速度
0
0
110
检查SAR〔G120/4〕的延时时间
0
516
模拟主轴的增益〔G96〕
0
539
模拟主轴电动机的偏移补偿电压〔G96〕
0
551
G96的主轴最高转速
0
556
G96的主轴最高转速
0
540—543
各档主轴的最高转速
0
3/5
GST
用SOR〔G120/5〕定向/换档
0
14/0
SCTA
加工启动时检查SAR信号
0
20/7
SFOUT
换档时输出SF
0
29/4
FSOB
G96时输出SF
0
35/6
LGCM
各档最高速的参数号
0
539,541,555
各档的主轴最高转速
0
542
主轴最高转速
0
543
主轴最低转速
0
585,586
主轴换档速度〔B型〕
0
577
模拟主轴电动机的偏移补偿电压
0
6519/7
主轴电动机初始化
0
0
6633
主轴电动机代码
0
0
6501/2
POSC2
用位置编码器
0
0
6501/5-7
CAXIS1—3
用高分辩率编码器
0
0
6503/0
PCMGSL
定向方法〔编码器/磁传感器〕
0
0
6501/1
PCCNCT
内装传感器
0
0
位置编码器信号
0
0
6504/1
HRPC
高分辩率编码器
0
0
24/0
JGNPMC
用PMC
0
0
71/6
DPCRAM
显示PMC操作菜单
0
0
123
图形显示的绘图坐标系
0
0001
ADFT
RDRN
DECI
ORC
TOC
DCS
PROD
DCS
0002
NFED
TFHD
HSLE
ASR33
PPD
STP2
0003
PSG2
PSG1
GST
OVRI
ZM4
ZM3
ZMZ
ZMX
倍率
PSG2
PSG1
×1
0
0
×2
0
1
×4
1
0
×8
1
1
0004
DMRX
GRDX
0006
DMR3
GRD3
0005
DMRZ
GRDZ
0007
DMR4
GRD4
设定码654
检测倍率
设定码654
检测倍率
模拟伺服
数字伺服
模拟伺服
数字伺服
000
001
010
011
1/2
1
1
2
1/2
1
3/2
2
100
101
110
111
3/2
3
2
4
5/2
3
7/2
4
设定码3210
参考计数器的容量
模拟伺服
μm检测器的数字伺服
μm检测器的数字伺服
0000
1000
10000
0001
2000
2000
20000
0010
3000
3000
30000
0011
4000
4000
40000
0100
5000
5000
50000
0101
6000
6000
60000
0110
7000
70000
0111
8000
8000
80000
1000
9000
90000
1001
10000
10000
100000
1010
11000
110000
1011
12000
120000
1100
13000
130000
1101
14000
140000
1110
15000
150000
1111
16000
160000
电动机〔脉冲编码器〕每转移动量
轴名
计数单位〔检测单位〕/μm
指令倍率〔CMR〕
检测倍率〔DMR〕
参考计数器的容量
2000脉冲
2500脉冲
3000脉冲
米制
10mm
X
1
4
10000
Z
1
1
4
10000
8mm
X
1
4
8000
Z
1
1
4
8000
6mm
X
1
3
2/4
6000
Z
1
1
3
2
6000
5mm
X
1
2/4
5000/10000
Z
1
1
2
5000
英制
X
1
1/2
2000/4000
Z
1
1
1
2000
0008
EILK
NOFC
ROVE
MFPR
0009
TMF
TFIN
TMF
TFIN
参数设定
16ms
16ms以上
0
0
0
0
32ms
32ms以上
0
0
0
1
48ms
48ms以上
0
0
1
0
64ms
64ms以上
0
0
1
1
80ms
80ms以上
0
1
0
0
96ms
96ms以上
0
1
0
1
112ms
112ms以上
0
1
1
0
128ms
128ms以上
0
1
1
1
144ms
144ms以上
1
0
0
0
160ms
160ms以上
1
0
0
1
176ms
176ms以上
1
0
1
0
192ms
192ms以上
1
0
1
1
208ms
208ms以上
1
1
0
0
224ms
224ms以上
1
1
0
1
240ms
240ms以上
1
1
1
0
256ms
256ms以上
1
1
1
1
0010
APRS
WSFT
DOFSI
PRG9
OFFVY
EBCL
ISOT
0011
MCINP
G01
SBKM
PML2
PML1
PML2
PML1
倍率
0
0
×1
0
1
×2
1
0
×4
1
1
×8
0012
NFED
ASR33
ZILK
STP2
0013
TCW
CWM
ORCW
INHMN
GOFC
GMOFS
GOFU2
JHD
TCW
CWM
输出的符号
0
0
M03,M04均为正输出
0
1
M03,M04均为负输出
1
0
M03为正输出,M04为负输出
1
1
M03为负输出,M04为正输出
0014
T2T4
WIGA
OFSB
STDP
GMCL
T2D
0015
CPRD
REP
PRWD
MORB
SKPF
COTZ
NWCH
CBLNK
0016
MDEC
SPAG
NPRD
RSTMB
RSTMA
0017
OPG7
OPG6
OPG5
OPG4
OPG3
OPG2
OPG1
0018
EDITB
TVC
PROAD
0019
DBCD
NEOP
M02NR
DCZ
XRC
DC4
DC3
0020
NCIPS
LM2
0021
APC8
APC7
APC4
APCZ
APCX
0022
ABS8
ABS7
ABS4
ABSZ
ABSX
0023
DSON
DHNG
DITA
DCHI
DFRN
DGRM
DJPN
0024
DIL
 升级会员
升级会员 