机器人瓦力.docx
《机器人瓦力.docx》由会员分享,可在线阅读,更多相关《机器人瓦力.docx(17页珍藏版)》请在冰豆网上搜索。
机器人瓦力
机器人“瓦力”制作教程
(一)—配件
编辑:
robotain来源:
老陈的博客2010-01-14发表评论
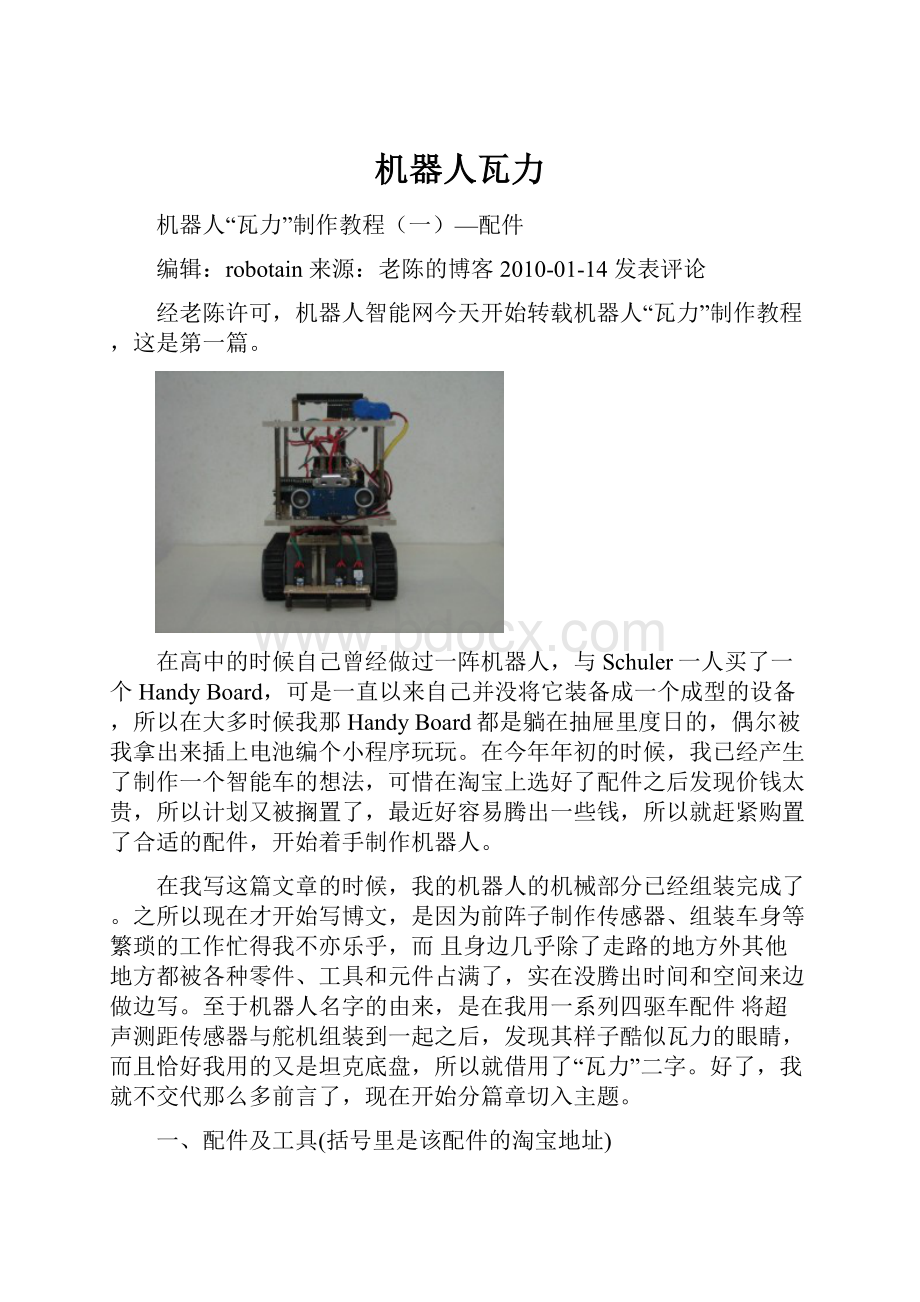
经老陈许可,机器人智能网今天开始转载机器人“瓦力”制作教程,这是第一篇。
在高中的时候自己曾经做过一阵机器人,与Schuler一人买了一个HandyBoard,可是一直以来自己并没将它装备成一个成型的设备,所以在大多时候我那HandyBoard都是躺在抽屉里度日的,偶尔被我拿出来插上电池编个小程序玩玩。
在今年年初的时候,我已经产生了制作一个智能车的想法,可惜在淘宝上选好了配件之后发现价钱太贵,所以计划又被搁置了,最近好容易腾出一些钱,所以就赶紧购置了合适的配件,开始着手制作机器人。
在我写这篇文章的时候,我的机器人的机械部分已经组装完成了。
之所以现在才开始写博文,是因为前阵子制作传感器、组装车身等繁琐的工作忙得我不亦乐乎,而且身边几乎除了走路的地方外其他地方都被各种零件、工具和元件占满了,实在没腾出时间和空间来边做边写。
至于机器人名字的由来,是在我用一系列四驱车配件将超声测距传感器与舵机组装到一起之后,发现其样子酷似瓦力的眼睛,而且恰好我用的又是坦克底盘,所以就借用了“瓦力”二字。
好了,我就不交代那么多前言了,现在开始分篇章切入主题。
一、配件及工具(括号里是该配件的淘宝地址)
1.HandyBoardwithExpansionBoard
2.RP5坦克车底盘
3.超声测距传感器
4.大谷DG04NF舵机4枚/舵机固定架若干
5.槽式光电开关2枚
6.两组7.2V锂电池
7.5mm厚有机玻璃板
8.发光二极管、光敏电阻、各种阻值的电阻、导线、螺钉等若干
9.为了钻小孔,以及切割和打磨相应的部件,我购置了一套电磨
10.烙铁、钳子等各种常规工具…
二、车身板材
起初仅在脑海里构思“瓦力”的造型的时候,为它设计了三层的结构:
第一层为主板、电池和几个传感器;第二层为超声测距;第三层为指南针、接口板、LCD和红外复眼。
可是在后来的实际安装中,由于一些传感器暂时缺乏或无法应用,所以现在成型的“瓦力”有两层:
第一层为主板、电池、超声测距;第二层为LCD和红外复眼;地面灰度传感器直接安装在坦克底盘上。
下面是现有两层有机玻璃板的图纸,已经修正并添加了一些尺寸标注,将本文末尾提供的dwg文件下载后直接在AutoCAD中打印在A4纸上,剪下后附在切割好的120mmx180mmx5mm有机玻璃板上即可打孔,有条件的最好将四角倒成圆角。
第一层:
说明:
1.40×20,82.5×110.5和171×79的矩形范围分别表示DG04NF舵机(装有超声测距)、HandyBoard和RP5底盘的位置,其内部包含的R1.5孔用于固定它们。
2.中间部位的R10孔用于引出电机和转速检测传感器的接线。
3.剩余的外围六个R1.5孔用于连接上层,可以根据传感器位置的需要来选择不同的孔。
第二层:
说明:
1.中间40×20的矩形和其前方R10的孔为舵机(红外复眼装于其上)及其引线孔。
2.36×80的矩形和其前方5个孔为LCD及其引线孔。
dwg文件下载:
第一层:
first-floor.dwg
第二层:
second-floor.dwg
注:
本文所给出的尺寸可能因为RP5底盘的个体差异而使得底盘上的孔与第一层板上对应的四个连接孔位置略有差异。
我本次提供的图中所做的尺寸标注还不是很完善,最近我会继续完善标注并更新本文。
其实这个本不应该属于“瓦力”的制作范畴,但是HandyBoard附带的原生SerialInterface实在让人头疼,硕大一个板子不说,接口还非得一头是DB9toDB25,另一头是RJ12,然后还多余的附带一个充电电路。
为了能让它便于安装到“瓦力”身上,我做了一个缩小版的SerialInterface(制作过程中参考了这里)。
原版:
缩小版:
其实这次我并没能将SerialInterface做的足够小,其中一个很大的原因是自己多年未焊接电路板,所以脑袋和手都不太灵活,元件的位置和接口安排不太合理不说,背面的引线也很混乱,还忘记了做开关和5V扩展接头。
在这里我先将它的制作过程简单写一下,并发布已经修改好的电路图,过阵子我重新做了新板子会更新本文的图片。
所需元件:
1.25V,10uF电容x4
2.MAX232x1
3.0.1uF陶瓷电容
4.红色、绿色发光二极管各一个
5.2.2K,1K电阻各一个
6.LM7805x1
电路图:
(如有错误或不明确指出请指出)
PDFVersion:
SerialInterface.pdf
ms10Version:
SerialInterface.ms10
这是改进后的电路图,我想在这个新的板子上,RJ12端用一个USBFemaleConnector、DB9端用一个3.5mmFemaleJack来做,5V以2JumperPin引出,然后分别做一根RJ12toUSB和一个DB9to3.5mmMale的线即可,这样SerialInterface无论与电脑端还是HandyBoard端的连接都很方便了。
四地面灰度传感器
这个地面灰度传感器十分容易制作,只要将它做的稍微好看一些就行了。
元件:
(一组传感器)
1.1K可调电阻
2.光敏电阻
3.红色发光二极管
电路图:
PDFVersion:
grey-scale.pdf
成型后的效果:
注:
其实元件里的1K可调电阻完全可以只使用1K电阻替代,我用可调电阻是为了能对二极管的亮度进行一下微调,消除一下因每个传感器个体差异导致的读取值的差异,在后来的编程序时能方便一些。
五、转速检测器
这里用到的转速检测器其实就是两只槽式光电开关,搭配RP5底盘上提供的带孔齿轮做测速用。
元件:
1.槽式光电开关x2
2.1K,10K电阻分别x2
电路图:
PDFVersion:
Photoelectric-switch.pdf
ms10Version:
photoelectric-switch-ms10
实际效果图:
(无奈我已经将它装在了“瓦力”身上,所以不太便于拍摄)
六、“瓦力”的“眼睛”
“瓦力”的眼睛是整个制作过程中最值得稍微炫耀一下的一个部件了,它由一个超声测距传感器、一个舵机、一个色标盘和一个灰度传感器组成,组装完成后酷似“机器人瓦力”的眼睛,我的机器人也因而得名。
我目前只让它扫描120度的范围,等我将基于它目前扫描范围内的壁障行走程序完成之后再考虑对它进行改进。
舵机、灰度检测器和超声测距我就不用多说了,超声测距与舵机的连接部分是我用当年四驱车上的龙头、刹车器等零件拼装成的,结果达到了意想不到的既好看又好用的效果。
色标盘是我后来想到的用于限定“眼睛”扫描范围以及确定前方的方法,因为虽然舵机本身可以控制旋转的速度和角度,但在实际的连续转动中它会因为每一次旋转的误差累计而导致长时间扫描的过程中扫描范围出现极大的误差,而且仅使用舵机很难精确的确定相对于机器人的“前方”、“左方”和“右方”,因此我用一个半圆色标盘来标定它的“前方”和扫描范围,再辅以时间和角度的计算,理论上便可以确定前方障碍的方向了。
现在我只编写了一个测试程序让它实时显示扫描过程中的测距数值,数值看起来还是比较精确的,至少用于壁障行走应该足够了,至于确定障碍方向以及真正完整壁障行走的程序,还需要等待一些时日才能写好,毕竟我的数学与编程能力还不是那么强。
色标盘:
dwgversion:
color-panel
灰度检测板:
(原理同地面检测)
整个机构的外形:
七、红外复眼
这个传感器就不用过多的介绍了,我打算将它与一个云台结合作为火焰探头。
元件:
1.光敏二极管x2
2.10k电阻x1
电路图:
PDFVersion:
flame-detector-pdf
ms10Version:
flame-detector-ms10
成型图:
到此为止“瓦力”的基本部件都已安装完成,在初步测试之中,“瓦力”用“眼睛”定位障碍的初级程序表现还不错,在无任何参照下的走直线、直角、原地旋转等动作表现也很令人满意,只是右侧马达似乎天生比左边快一点儿,距离长了之后就出弧线了,但总体来说整个“瓦力”的运行状态还是令人满意的。
到本文为止《制作机器人“瓦力”》这个系列已经完成,日后这些博文会随着我对瓦力的修改和升级而同步更新。
下一个和瓦力有关的系列会进入程序部分,不过这个环节比较耗时,有可能不会在近期推出并且频繁更新。
最后,发一组图片:
 升级会员
升级会员 