1励磁系统中的各种定值及试验.docx
《1励磁系统中的各种定值及试验.docx》由会员分享,可在线阅读,更多相关《1励磁系统中的各种定值及试验.docx(20页珍藏版)》请在冰豆网上搜索。
1励磁系统中的各种定值及试验
励磁系统中的各种定值介绍
一、励磁系统中各种定值的分类
励磁系统中的各种整定值主要是在励磁调节器(AVR中。
本次重点介绍励磁调节器中的定值。
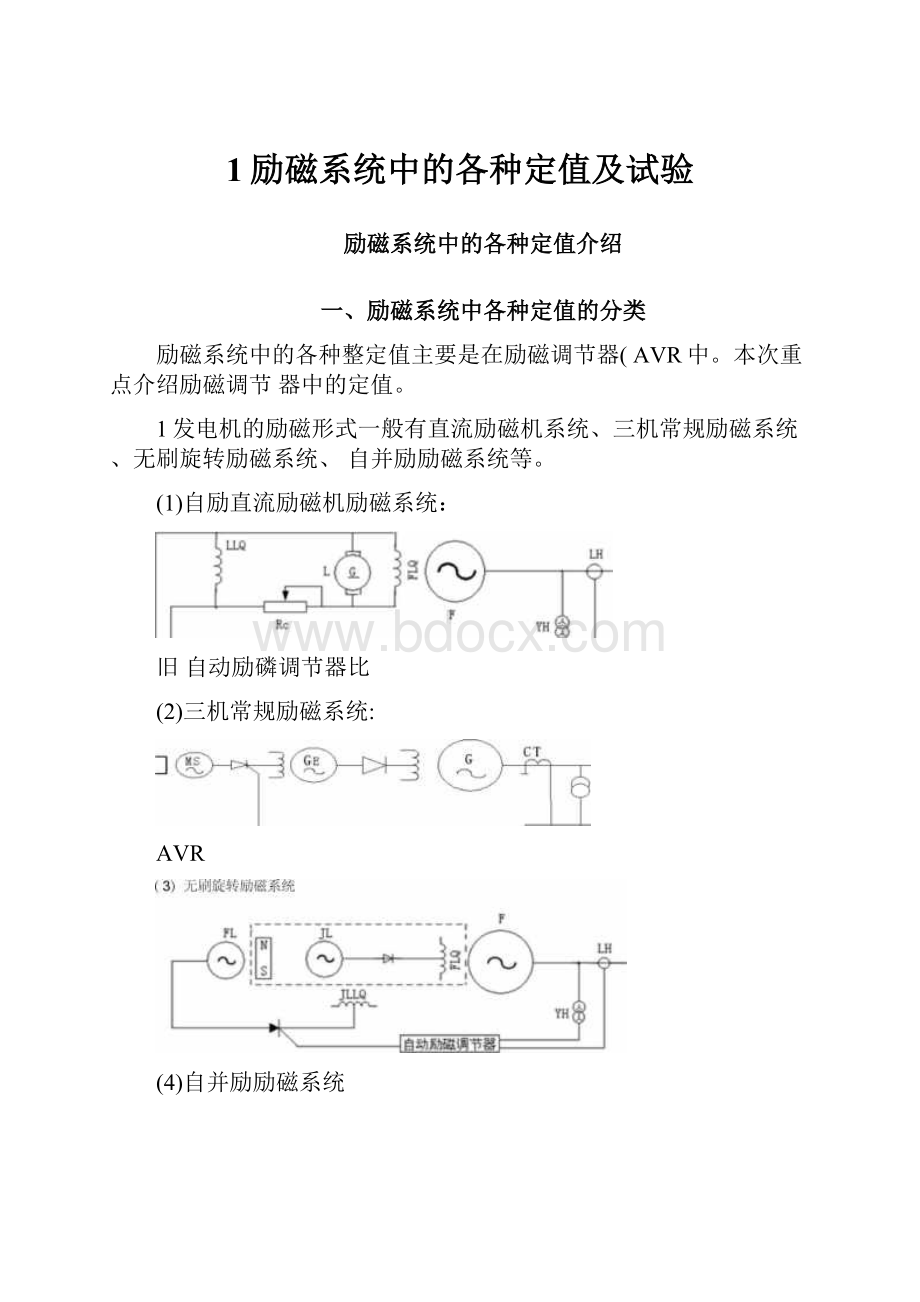
1发电机的励磁形式一般有直流励磁机系统、三机常规励磁系统、无刷旋转励磁系统、自并励励磁系统等。
(1)自励直流励磁机励磁系统:
旧自动励磷调节器比
(2)三机常规励磁系统:
AVR
(4)自并励励磁系统
自动励磁调节器
厝元件
2、华北电网各个电厂所用的励磁调节器有吉思GEC系列、南瑞电控SAVR2000系列、
NES510(系列、SJ800系列、武汉洪山的HJT系列、ABB公司的UN5000系列、GE公司的EX2100系列、英国R-R的TMR-AVR日本三菱等。
各个厂家的励磁调节器中的定值数量各不相同。
少的几十个(如吉思、南瑞),多的上千个(如ABBGE。
3、针对各种励磁调节器中的定值按照使用功能可以分为
(1。
控制定值(控制参数)
控制定值包括自动方式控制参数、手动方式控制参数、PSS控制参数、低励限制控
制参数、过励限制控制参数、过激磁限制控制参数等
(2)限制动作定值
包括过励限制动作定值、过激磁限制动作定值、低励限制动作定值等
(3)其他定值
包括励磁调节器模拟量测量的零飘修正、幅值修正、励磁方式定义、起励时间设定、调压速度设定、调差率等。
励磁调节器内部的控制参数
励磁调节器作为发电机的一种自动控制装置。
在正常运行或限制动作时,用来控制发电机的运行工况不超过正常运行范围的参数。
这些参数在运行中,是时刻发挥作用的控制参数整定的合理,直接影响整个励磁系统的动态特性的好坏及各种限制功能的正常发挥作用。
一、自动方式下的控制参数(电压闭环)
1、自动方式是以机端电压作为控制对象的控制方式,是励磁调节器正常的工作方式。
也是调度严格要求必须投入的运行方式。
华北电网调度部门下发的《华北电网发电机励磁系统调度管理规定》中规定:
(1)各发电厂机组自动励磁调节装置正常应保持投入状态,其投入、退出和参数更
改条件应在运行规程中作出规定,并应得到调度部门和技术监督部门的批准。
调度部门要求投入的PSS装置应可靠投入运行。
发电机自动励磁调节装置、PSS装置如遇异常退
出,应及时向当值调度员备案,事后向技术监督部门汇报。
(2)电厂将励磁系统定值报有关调度部门和技术监督部门审核、批准后执行。
运行中如定值或设定参数发生变化,须经有关调度部门和技术监督部门核准方可执行。
参数实测后如定值或设定参数发生变化,应说明对已实测参数是否有影响,必要时重新进行
参数实测工作。
(3)发电机励磁系统应采用定发电机电压控制方式运行。
如果采用其他控制方式需要经过调度部门和技术监督部门的批准。
2、按照经典自动控制原理,一般采用PID控制方式。
其中的P代表比例调节控制,I代表积分调节控制,D代表微分调节控制。
一般励磁调节器中的PID控制形式有以下三种方式:
(1)并联PID控制方式传递函数
Kp:
比例增益;Ki:
积分增益;Kd:
微分增益。
传递函数的数学表达式为:
Kp译七S
(2)串联PID控制方式传递函数
1+T1S1
传递函数的数学表达式为:
Kp•(厂云M云)说明:
并联PID控制方式和串联PID控制方式,按照自动控制原理的传递函数,只是表述
方式的不同,实际的传递函数形式是一致的。
(KpT1Kp)SKp*T1S2
将串联PID传递函数中,令T2=0,可以变换为:
Tl-
(2)。
以上
(1)、
(2)两个数学公式中,令:
Ki
(1)=Kp/Ti
(2),Kp
(1)=Kp/Ti*T1+Kp
(2),Kd
(1)=Kp*T1
(2)。
则二者具有相同的函数特性。
(3)两级超前滞后环节控制方式传递函数
说明:
耶:
比例壇益
Tl.12:
超向时何常数
【氛14:
滯后时何常数丁歹发电机转于时何常数
传递函数的数学表达式为:
Kp*1T1S1T3S
1+T2S1+T4S
在实际整定中,一般将T1«T2此环节主要体现的是积分效应(I);T3〉T4,此环节主要体现的是微分效应(D)。
具体到实际励磁调节器中不同的设计,励磁调节器中的实际传递函数和表述方式不
同,整定的参数含义和数值也有所不同。
请注意。
二、励磁系统中的自动方式下,主要影响特性的是PID参数。
PID参数的整定不同,对
自动方式下,励磁系统的动态特性影响很大。
1、励磁系统行业标准中规定:
阶跃量为发电机额定电压的5%发电机端电压超调量应不超过阶跃量的30%振荡次数不超过3次,调整时间不超过10S,电压上升时间不大于0.6S(自并励系统)或0.8S(三机常规))。
2、自动控制方式下,PID参数变化对励磁系统动态特性的影响
(1)以并联PID控制方式为例,了解PID参数对动态特性的影响。
并联PID控制方式的基本传递函数形式如下:
ir.ztFi电j,
(1.1)改变Kp参数对励磁系统动态特性的影响:
改变纯比例增益Kp,主要影响发电机电压的上升速率和超调量,纯比例增益Kp增
大,上升速度加快,超调量增大。
(1.2)改变Ki参数对励磁系统动态特性的影响:
仅改变纯积分增益Ki,对发电机电压的响应特性影响不大。
(1.3)改变Kd参数对励磁系统动态特性的影响:
微分改喪启5%阶跌试验比较
1”06-
1.03
1.01
1”00
0.9S
□.00.40-81B21.62-O2.42,S3,23.64.Os
仅改变纯微分增益Kd,影响发电机电压上升速度和超调量,Kd增大,上升速度加快,超调量减小;而Kd减小,上升速度变慢,同时超调量增大。
(2)以两级超前滞后控制方式为例,了解PID参数对动态特性的影响:
两级超前滞后环节控制方式的基本传递函数形式如下:
Kn:
比例聃益
T1、T^r趙liifH寸卩”常数
T3.14^獅后t吋⑷「常数「密:
程:
七科L轧子I吋M•席数
(2.1)改变AVR的增益Ks(相当于Kp)
发电机空载,改变Ke・+5%阶罠试验
4.294.795.29反旳6.296.797.297.79S.298.799.29
测试结果表明,仅改变直流增益Kp,主要影响发电机电压的上升速率和超调量,增
益Kp增大,上升速度加快,超调量增大。
测试结果表明,仅改变微分时间常数T1,主要影响发电机电压的上升速率,微分时间常数T1增大,上升速度加快,且电压超调量减小
注:
在调节器中,T1、T2参数,构成一级积分效应环节。
当T1增大时,相当于增加了微分效应,减少了积分效应。
因此,T1增大,上升速度加快,超调量减少。
(2.3)改变AVR的时间常数T2
测试结果表明,仅改变时间常数T2,主要影响发电机电压的上升速率和超调量,时间常数T2减小,上升速度加快,超调量变大。
注:
在调节器中,T1、T2参数,构成一级积分效应环节。
当T2减少时,相当于增加了微分效应,减少了积分效应。
因此,T1减少,上升速度加快,超调量变大。
(2.4)改变AVR的微分时间常数T3
T3变化对+毋肋跃试验的影响
测试结果表明,仅改变微分时间常数T3,主要影响发电机电压的上升速率和超调量,微分时间常数T3增大,上升速度加快,超调量减小
注:
在调节器中,T3、T4参数,构成一级微分效应环节。
当T3增大时,相当于增加了微分效应。
因此,T3增大,上升速度加快,超调量减少。
(2.5)同时增大AVR勺时间常数T1、T2,保持T1/T2不变。
测试结果表明,同时增大AVR的时间常数T1、T2,对发电机电压的超调量和上升时间影响不大。
3、通过以上波形,我们可以了解PID参数整定是否合适,在现场可以通过空载5渐跃试验的方法来验证。
如果发现空载5%阶跃试验的结果,与行业标准相比不符。
可以参照以上的调整原则进行参数调整,使之满足标准的要求。
其他传递函数的形式,可以依照传递函数的变换为并联PID的形式,根据实际传递
函数的形式进行参数调整。
一般情况下,试验整定完成后,此部分的参数不允许随意更改。
因为,此部分参数是保证励磁系统动态特性的基础,同时也是励磁调节器中其他限制控制功能实现的基础。
三、手动控制方式(励磁电流闭环方式或励磁电压闭环方式)
手动控制方式,是自动方式方式发生故障后的一种后备运行方式。
手动控制方式的控制对象是If(转子电六)或Uf(转子电压)。
在手动方式下,不要求励磁系统的动态特性。
行业标准中,也未对其提出具体的要求。
我们一般认为,只要达到运行中稳定。
发生小扰动后,变化过程平稳,并最终仍能够保持稳定即可。
1手动控制方式的传递函数形式一般采用:
(1)PID控制(比例、积分、微分)、
(2)P控制(比例)、
(3)PI控制(比例、积分)
传递函数形式比较简单,不在描述了。
2、手动控制方式,各个制造厂为方便起见,原理设计上一般很简单。
某些制造厂还将此部分参数设置为不允许现场调整。
我们通过现场实际试验和检查分析后,发现:
在一般情况下,手动方式下的控制参数PID整定值,一般为自动方式下的1/3到1/5。
保证工作稳定即可,不追求控制的快速性和精确性。
手动控制方式传递函数与自动控制方式传递函数相似。
但是要注意控制对象是If
(转子电流)或Uf(转子电压),不是自动方式下的机端电压。
四、PSS控制方式
1、PSS的作用:
PSS(电力系统稳定器)是附加在自动方式下的控制方式。
其作用是抑制电网系统的
0.1—2HZ的有功功率振荡。
此功能,通过测量发电机有功功率的变化,利用一组控制参数,来改善励磁系统的角度滞后情况,抑制电网系统的有功功率振荡。
通过PSS功能,
可以提高发电机有功输出的稳定性和对系统振荡的抑制能力。
正常运行中,此部分功能是正常投入工作的。
如果发生系统振荡,PSS将自动起作用,以抑制系统振荡。
华北电网调度部门下发的《华北电网电力系统稳定器(PSS装置运行暂行规定》
中要求:
(一)投入PSS装置的机组,其机组的PSS装置正常必须置入投运状态,且必须将自动励磁调节器投入自动位置。
(二)投入PSS装置的机组,如自动励磁调节器退出自动位置,视为PSS退出运行。
(三)投入PSS装置的发电机组因各种原因退出PSS装置(PSS氐于定值后装置自动退出情况除外)时,应提前向调度部门提出申请。
原则上该机组的PSS退出时,相应机组也应停运,特殊情况另行处理。
(四)发电机组PSS装置(包括励磁系统)的整定参数应适应华北、华中、东北区域电网不同联网方式运行要求,对0.1HZ-2.0HZ系统振荡频率范围的低频振荡模式应能提供正阻尼。
(五)根据电网安全稳定要求应投入PSS装置的发电机组,发电厂有责任和义务在机组安装PSS装置并将其置入投运状态;对于新投产的机组,其PSS装置必须与该机组同步投运。
2、PSS传递函数形式:
(1)PSS1A模型
AP
TwS
化-
Kpsa
1卜T1S
1+T3S
7
1+T5S
/Ur
二
>
1+TwS
津
1+T2S
1+T4S
1+T6S
J
-M9&
pssiA莫型参数说明:
TW隔直环节时间常数;Kpss=PSS俞出增益;T1、T2、T3、T4、T5、T6=g前滞后补偿系
数。
(2)PSS2A模型
TW1TW2TW3隔直环节时间常数;T7=电功率计算时间常数;Ks仁PSS俞出增益;心2=计算电功率的补偿系数;Ks3=言号匹配系数;T1、T2、T3、T4=g前滞后补偿系数;
T8、T9=ffl振信号滤波时间常数;NM扭振信号滤波器阶数;
3、PSS投入效果的检查:
有功功率振荡的阻尼比计算方法:
标么制
通过现场加入+2~+4渐跃信号,实际测量的发电机有功功率的波形,计算阻尼比。
计算
公式如下:
1,“P1-P2、
E=ln()
2P3-P4
(1)PSS未投入的负载阶跃波形:
带负荷+睥阶跃试验现场实测录波图
带负荷PM投入事茨阶跃试验观场实测录波图
通过录波图的比较,可以明显看出PSS投入后,+2渐跃中的有功功率变化。
有功功率的振荡波形有明显的改变。
规程要求:
阻尼比应提高到0.1以上,保证机组对于系统的振荡是强阻尼效果。
且振荡次数有所减少,证明能够迅速抑制住机组对系统的振荡,保证机组有功输出的稳定性。
五、过励限制、低励限制、过激磁限制控制参数:
以上三种限制,是励磁系统中都具有的限制器。
其功能是在发电机发生运行工况改变时,控制发电机的机端电压、励磁电流、无功功率在正常允许的范围内,保证发电机不由于系统的故障、系统振荡或人为误操作而跳机,造成非计划停机。
此三种限制器的控制参数,在励磁调节器中,某些厂家允许单独设置。
但也有某些厂家为保证与自动方式控制参数之间的配合,已经在内部默认设置好了。
传递函数的形式,也依据不同的厂家有所不同。
关于限制器的传递函数,各个厂家也许各有不同,一般不提供给用户。
如果有兴趣的人,可以咨询厂家,让他们提供此部分的传递函数形式。
以下列出的各种限制器最终应达到的试验效果,只作为现场进行试验验证的参考。
具体的传递函数和整定控制参数,可咨询各个厂家。
(某些厂家在说明书里,未提供相关的函数和控制参数的说明。
)
1、过励限制控制参数:
此部分的控制参数,一般采用励磁调节器厂家的默认设置的控制参数,并经现场试验验证,限制动作后,工作稳定即可。
此部分的限制功能重要的是控制If(转子电流)不超过发电机正常允许的范围。
(1)现场实际波形
说明:
当发电机出现强励工况时,发电机的If急剧上升。
当达到动作定值时,瞬时If电流限制动作,限制If电流为2.0倍额定(一般情况下)。
在经过限制动作定值的延时时间后,自动降低If电流至额定电流附近。
通过试验波形主要检查,If电流达到限制动作定值后,If(控制对象)迅速被控制在限制值附近稳定运行,且不发生If的上下大幅度振荡。
通过现场波形,就可以确认控制参数合理,控制特性良好。
2、低励限制控制参数:
此部分的控制参数,一般采用励磁调节器厂家的默认设置的控制参数,并经现场试验验证,限制动作后,工作稳定即可。
此部分的限制功能重要的是控制发电机的无功功率不超过发电机正常的允许范围。
(1)现场实际波形
标么制
励磁调节器自动-5%阶跃,检查低励限制器限制情况
秒
说明:
通过试验波形,主要检查无功功率达到限制动作定值后(允许在短时间内,无功下降较多。
因为在发生无功下降时,励磁调节器不可能马上起作用。
终归要等到调节器判定出来后,才能进行调节。
而无功功率的变化,不能按照机端电压的调节速度的要求调整进行。
因此,会出现短时间无功下降较多的现象),无功功率(控制对象)迅速被控制在限制值附近稳定运行,且不发生无功功率的上下大幅度振荡。
通过现场波形,就可以确认控制参数合理,控制特性良好。
3、过激磁限制控制参数:
此部分的控制参数,一般采用励磁调节器厂家的默认设置的控制参数,并经现场试验验证,限制动作后,工作稳定即可。
此部分的限制功能是控制发电机的V/F的比率不超过发电机正常的允许范围。
(1)现场实际波形:
发电机申压额定"降低转速至V/F限制动作,最终逆变灭磁试验
说明:
通过试验波形主要检查:
1当电压上升时,限制动作,能够很快的控制发电机机端电压/频率的比值在允许范围内(限制动作整定值),且限制动作后,限制机端电压在限制定值处稳定,不发生大幅度的振荡。
2当频率下降时,限制动作,能够确认达到限制动作定值后,调整发电机机端电压下降。
下降期间,机端电压平滑下降,且V/F的比值保持为限制定值。
励磁调节器内部的限制器动作定值
励磁调节器内部限制器的动作定值,整定方法与保护的整定原则基本相同。
主要根据发电机、变压器的基本特性来整定。
在整定限制定值时,还要考虑与机组保护定值的配合关系。
一、限制动作定值与控制参数之间的关系:
限制动作参数(定值)
第一个方框内整定的是限制动作定值,第二个方框内整定的是限制控制参数。
请在了解励磁调节器整定参数时,注意区分。
所有的励磁调节器的限制功能均由以上两部分组成。
二、主要介绍过励限制、低励限制、过激磁限制三种限制器的限制动作定值整定方法。
1、过励限制(OEL:
瞬时/延时过励磁电流限制又称为强励限制,限制曲线按转子发热量大小做成反时限特性,并考虑当电力系统中发生短路,应保证机组强励倍数不受限制。
限制参数可根据发电机制造厂提供的转子过负荷曲线的要求设定。
(1)限制动作曲线与发电机转子过负荷曲线、保护的转子过负荷曲线的配合关系:
1000U
80CQ
£OOD
Q40fD
Time(Sec)
(Ifl)定义匚限制启动宦值Clf,t)定义:
限制曲绘整定定值
参照一定的鶴式.由(If,。
确认限制曲线上的耳他点的数据
(2)整定方法:
(2.1)按照发电机的转子过负荷曲线(反时限)。
(2.2)与发变组保护转子过负荷(反时限)定值相配合。
保证限制先于保护动作。
(2.3)励磁变压器保护整定,也应同时考虑过励限制时,保护不会先于限制动作。
(3)限制动作曲线的校验,可以在静态调试中,通过通入不同的If电流,检查动作延时情况。
要求在限制曲线的各个段的延时,均在发电机转子过负荷曲线和保护转子反时限过负荷曲线的以内。
2、低励限制(UEL:
限制整定值可在线修改。
实际限制参数应根据进相试验的最终结果进行设定。
(1)限制动作曲线:
一般情况下,低励限制曲线形状有以下4种:
1.1)直线形(两点定义):
(1.2
(1.3)四段折线(五点定义):
(1.4)曲线形(多点定义)
(2)定值整定方法:
(2.1)按照发电机进相试验的结果,进行整定。
(2.2)进相试验时,同时进行低励限制动作试验。
此种方法,在我们调试中,使用较多。
因为,在某些调节器中,低励限制的实际动作值,还要考虑当时的机端电压情况。
如果当时机端电压较高,贝U限制动作值较低。
当机端电压较低时,贝U限制动作值较高。
调节器中,一般是将当时机端电压的标幺,平方后乘以整定的限制动作值。
因此,会造成低励限制的实际动作值在整定值附近有土15%Sn左右的变化。
进相试验一般以50%75%100%Pn三四个点进行试验
1对于<50%Pn以下,由于未进行试验,整定时,建议均以50%P进相试验结果整定
2如果由于低励限制曲线的定义问题,无法按照所有负荷点进相试验的结果进行整定。
建议应该按照机组运行中较多出现的工况下的进相试验的结果,进行整定。
对于运行中较少出现的工况,低励限制可以不按照进相试验的结果进行整定。
注意:
某些调节器内部有功、无功的标幺值是以视在功率Sn为基准的。
与我们通常所说的有功功率百分数有所区别。
3、过激磁限制(V/F):
一般保护配置有定时限和反时限两种保护。
在励磁调节器中,有可能只配置其中一
种限制。
过激磁限制的定值整定,一定要与保护的过激磁定值相配合。
如果保护定时限为1.1,则限制定值应整定为1.08—1.09,保证限制先于保护动作。
(1)保护过激磁反时限曲线和过激磁限制定值的曲线关系应如下:
1.CO--
2£omd)2工^-0>」01;」0>匚劭0
Tine(sec)
(V2/Uz2)定义:
限制启动定值(Vl/Hzl,龙D定义泮fHz限制曲线超定定值
参照一定必式”由(Vl/Hzl,U)确定限制曲线上的其他的数据
(2)以现场实际录波图为例,进行分析:
发电机申压额定"降低转速至V/F限制动作,最终逆变灭磁试验
应通过录波图,确认过激磁限制动作时的频率,最终逆变灭磁的频率。
并检查
动作定值与设定值相符。
要求:
限制动作线应在保护动作线以内,同样是要求保证限制先于保护动作。
此次,只是简单介绍励磁系统中的参数的基本分类和部分重要参数的整定原则。
让大家在实际工作中,对调节器内部的参数和功能有所了解。
要知道,不同厂家的调节器,内部的传递函数和功能设置也各不相同,整定的参数各不相同。
因此,要求大家有时间,对调节器内部的参数和功能,进行整理和记录,以便于日常的维护管理。
并且通过对参数和各种功能的了解,制定相应的试验检查方法。
以ABB-UN5000调节器的整定参数为例,进行说明
 升级会员
升级会员 