实验三数字PID 控制器编程算法的实现.docx
《实验三数字PID 控制器编程算法的实现.docx》由会员分享,可在线阅读,更多相关《实验三数字PID 控制器编程算法的实现.docx(16页珍藏版)》请在冰豆网上搜索。
实验三数字PID控制器编程算法的实现
AP0704225孙凯杰
实验三数字PID控制器编程算法的实现
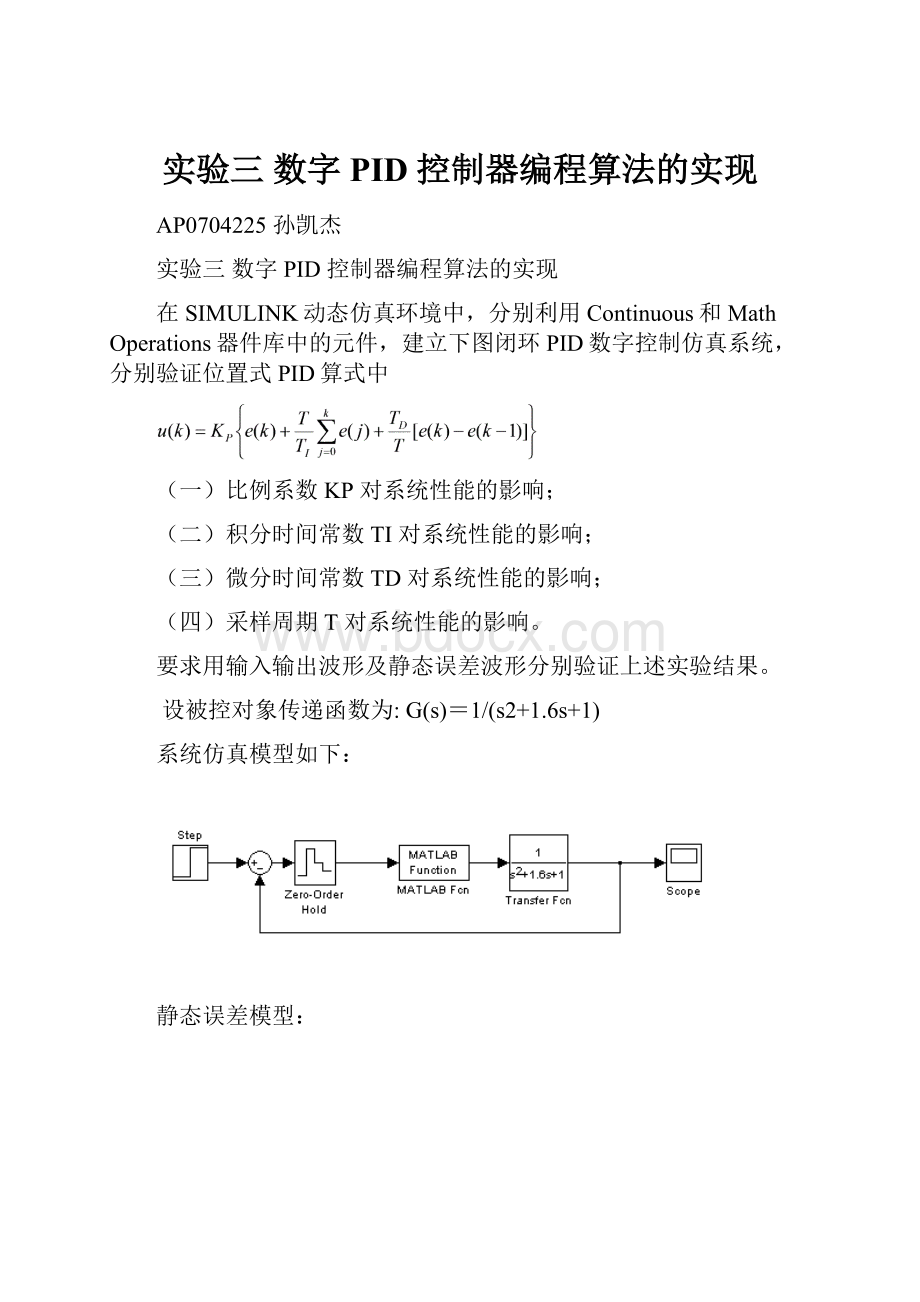
在SIMULINK动态仿真环境中,分别利用Continuous和MathOperations器件库中的元件,建立下图闭环PID数字控制仿真系统,分别验证位置式PID算式中
(一)比例系数KP对系统性能的影响;
(二)积分时间常数TI对系统性能的影响;
(三)微分时间常数TD对系统性能的影响;
(四)采样周期T对系统性能的影响。
要求用输入输出波形及静态误差波形分别验证上述实验结果。
设被控对象传递函数为:
G(s)=1/(s2+1.6s+1)
系统仿真模型如下:
静态误差模型:
系统程序程序如下:
functiony=DPID(x)
globalN
globalKp
globalT
globalTi
globalTd
globale
e(N)=x;
u=0;
fori=1:
N
u=u+e(i);
end
y=Kp*x+[(Kp*T)/Ti]*u+[(Kp*Td)/T]*[e(N)-e(N-1)];
fori=1:
N-1
e(i)=e(i+1);
end
初始化程序如下:
先取参数如下:
Kp=60N=100T=0.0001TD=0.2Ti=0.01
functiony=DPIDcsh
globalN
globalKp
globalT
globalTi
globalTd
globale
Kp=60
N=100
T=0.0001
Td=0.2
Ti=0.01
fori=1:
N-1
e(i)=0;
end
(一)分析比例系数KP对系统性能的影响:
取KP=60
图1输入信号
图2输出图形
图3静态误差图形
取KP=30:
图4输出波形
图5静态误差图形
取Kp=90
图6输出波形
图5静态误差图形
分析:
由上不同Kp值得到的仿真结果可知:
比例系数加KP大,使系统的动作灵敏,速度加快。
KP偏大,则振荡次数增加,调节时间加长。
KP太大,系统会趋于不稳定。
KP太小,又会使系统动作缓慢。
对稳态特性的影响
加大比例系数KP,在系统稳定的情况下,可以减少稳态误差ess,提高控制精度。
但加大KP只是能够减少稳态误差ess,不能完全消除稳态误差ess。
(二)分析积分时间常数TI对系统性能的影响:
取Ti=0.01
图6输出波形
图7静态误差图形
取Ti=0.1
图8输出波形
图9静态误差图形
取Ti=0.001
图10输出波形
图11静态误差图形
分析:
由上不同Ti值得到的仿真结果可知:
对动态特性的影响
TI太小时,系统将不稳定。
TI偏小,则系统振荡次数较多。
TI太大时,对系统性能的影响减少。
当TI合适时,过渡过程的特性则比较理想。
对稳态误差的影响
积分控制能消除系统的稳态误差ess,提高控制系统的控制精度。
但若TI太大时,积分作用太弱,以至不能减少稳态误差ess。
(三)分析微分时间常数TD对系统性能的影响:
取Td=0.2
图12输出波形
图13静态误差图形
取Td=1
图14输出波形
图15静态误差图形
取Td=10
图16输出波形
图17静态误差图形
分析:
由上不同Td值得到的仿真结果可知:
微分控制可以改善动态特性,如超调量减少,调节时间缩短,允许加大比例控制,使稳态误差减少,控制精度提高。
TD偏大时,超调量较大,调节时间较长。
TD偏小时,超调量也较大,调节时间也较长。
当TD合适时,可以得到比较满意的过渡过程。
(四)(四)分析采样周期T对系统性能的影响:
取T=0.0001
图18输出波形
图19静态误差图形
取T=0.001
图20输出波形
图21静态误差图形
取Td=0.00005
图22输出波形
图23静态误差图形
分析:
由上不同T值得到的仿真结果可知:
当T太大时,系统会不稳定,T较小时会有少许超调,当T适当时,误差基本为零,控制精度很高。
 升级会员
升级会员 