螺旋轮式管道机器人设计及其制作.docx
《螺旋轮式管道机器人设计及其制作.docx》由会员分享,可在线阅读,更多相关《螺旋轮式管道机器人设计及其制作.docx(12页珍藏版)》请在冰豆网上搜索。
螺旋轮式管道机器人设计及其制作
课程设计
螺旋式管道机器人
机器人总体方案设计
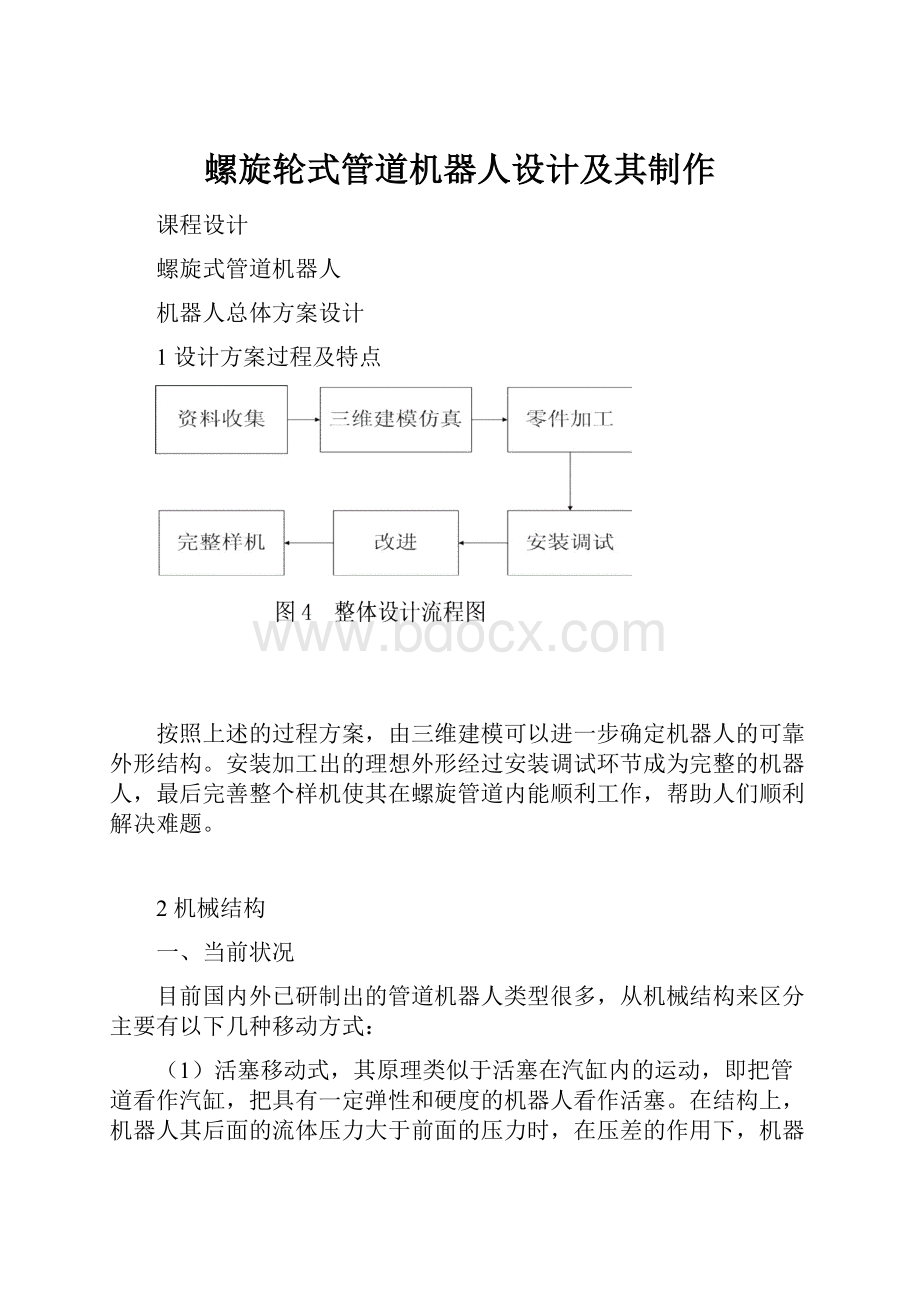
1设计方案过程及特点
按照上述的过程方案,由三维建模可以进一步确定机器人的可靠外形结构。
安装加工出的理想外形经过安装调试环节成为完整的机器人,最后完善整个样机使其在螺旋管道内能顺利工作,帮助人们顺利解决难题。
2机械结构
一、当前状况
目前国内外已研制出的管道机器人类型很多,从机械结构来区分主要有以下几种移动方式:
(1)活塞移动式,其原理类似于活塞在汽缸内的运动,即把管道看作汽缸,把具有一定弹性和硬度的机器人看作活塞。
在结构上,机器人其后面的流体压力大于前面的压力时,在压差的作用下,机器人克服了管壁与活塞之间的摩擦阻力而向前运动。
机器人可以携带各种传感器,一边行走一边用于管道检测。
(2)滚轮移动式,利用滚轮驱动式的行走结构,以电机作原动机,为了增加牵引力,一般采用多轮驱动式,由于轮径太小,越障能力有限,而且结构复杂。
(3)履带移动式,仿造履带式车辆行走原理,采用带齿轮减速箱的直流伺服电机驱动。
(4)足腿移动式,其基本原理是利用足腿推压管壁来支撑机体,利用多腿可以方便地在各种形状的弯管内移动。
由撑脚机构、牵引机构和转向机构构成,可在各种类型的管道里移动。
(5)蠕动移动式,模仿昆虫在地面上爬行时蠕动前进与后退的动作设计,机构由蠕动丝杠、螺母、前后支撑足及前后封闭弹簧构成。
在行走时,分别使左右支撑足上端与管壁接触,下端用滚轮与管壁接触。
驱动蠕动丝杠依次左转和右转,使螺母在丝杠上左右移动。
(6)螺旋移动式,利用螺旋原理使管外电机推动带有弹性的驱动部件前进,该驱动螺旋部件可以自动越过小的台阶。
以上移动方式各有所长,我们在第六种螺旋移动的基础上进行改进,来实现我们设计目的。
螺旋式上升的移动方式有着如下优点:
1)移动速度稳定,能够实现中途停止,顺应了多变的情况,便于应用于工业上实际作业。
2)在整个上升过程中利用了滚动原理,较为稳定没有震动,内部能够安装一些精密仪器。
3)旋转过程中有着与管道相垂直的径向转动,接触面较广,不存在死角问题,便于实际应用中的勘测、清洗等实际工作的具体实施。
就螺旋式管道机器人各种设计也有个各自的优点,就我们一些参考文献中的设计方案进行对比来具体了解我们的机械结构原理。
下图出自论文《URT螺旋轮式管道检测机器人越障性能研究》中,与我们的方案类似的采用了三叉元结构,利用了三角形的稳定性。
就单单上图的设计我们提出了如下几个没有克服的问题:
1)驱动设计较少,在管道内部的环境中容易产生打滑等抱死的状况。
2)弯半径较大,无法适应复杂的管道内部状况。
3)上升力矩太小,垂直时无法克服重力以及管道内部的一些阻力。
我们会在我们的设计过程中一一克服以上问题。
二、实施方案
1、螺旋头的轴心偏移
在正常管道中,3个沿管道周向120°均布的螺旋轮的初始预紧
力大小关系为:
Fk1=Fk2=Fk3。
由于螺旋头的重量与弹簧预紧力相比较小,故可以忽略其影响。
设3个螺旋轮预紧弹簧的刚度系数均为k,则o1轮的弹簧预紧力增量为:
△F1=k(x-oo′);
o2,o3轮的弹簧预紧力增量为:
△F2=k·oo′/sin30°。
由于3个轮子夹角不变,通过轴心处受力平衡易知:
△F1=△F2,即:
x-oo′=oo′/sin30°,故得轴心的偏移量为:
oo′=x/3。
2、多节设计
如图是我们的设计方案,采用此种多节设计有着以下优点:
1)采用多节设计能够加大前进驱动力,不会出现卡死的现象。
2)各节之间运用万向接头3连接,能够在较小的半径下转弯。
3)多节半径柔韧性好,出现局部受阻现象后其他部位依旧能够正常工作。
3、伸缩装置
为了能够适应更多内径的管道,在每一节的设计中还有一个锁紧装置。
该伸缩装置一段与电机固定,另一端与一伸缩关节相连接。
工作时带有螺纹的主轴会随着电机进行转动,伸缩关节会随着螺纹进行上下移动。
在移动的同时带动连杆,减少两个连杆的角度,从而增加了轮子的中心距,达到了增大半径锁紧的目的。
伸缩关节的细节图如上所示,呈现三叶草状,每一个瓣对应相应的连杆。
关
节与连杆中间通螺栓进行间隙连接,能够自由移动。
4、舵机变速装置
为了便于控制,我们将控制轮子运动速度的电机设置为固定的,而轮子的角度则有舵机进行控制,控制范围为-20°—+20°。
如下图所示,假设有一个竖直管道,x轴为水平转动速度,y轴为竖直上升速度。
轮子与水平夹角a可以在-20°—+20°之间进行改变,从而造成在y轴上的分速度进行改变,达到了改变上升速度的目的。
在更改a角的同时,也能够增加上升力矩,正如同千斤顶一样,用较小的力矩去克服较大的阻力,达到克服阻碍,顺利上升的目的。
如上图:
1,2圆盘式舵机4腿部支架3轮子
1,2之间可以进行相对的精确转动,从而调整轮子与水平面的角度。
5、多节结构之间的连接
多节之间要能相对转动,但是却要保持连接。
于是我们采用了三节万向接头的连接方式(如右图所示)。
1-套筒;
2-十字轴
3-传动轴叉
4-卡环;
6f#V%k1^$K D2n-m5-轴承外圈
6-套筒叉
工作原理:
十字轴式万向节由一个十字轴,两个万向节叉和四个滚针轴承等组成。
两万向节叉1和3上的孔分别套在十字轴2的两对轴颈上。
这样当主动轴转动时,从动轴既可随之转动,又可绕十字轴中心在任意方向摆动,这样就适应了夹角和距离同时变化的需要。
在十字轴轴颈和万向节叉孔间装有滚针轴承5,滚针轴承外圈靠卡环轴向定位。
十字轴式刚性万向节具有结构简单,传动效率高的优点,但在两轴夹角α不为零的情况下,不能传递等角速转动。
6、预期的一些设计图
预期基本参数
净重:
2-5kg
行走速度:
0~5m/min无级调速
适应圆形管道:
直径范围Φ120~200mm
管内越障高度:
5mm
最小转弯半径:
100mm
机器人系统控制
通过上述的机械设计的构思以及机械结构的制作,一个机器人的雏形已经形成。
但是机器人最重要的就是能使它能动起来,按照指令完成一定的动作,所以我们通过编程及运用单片机来控制机器人的运动,实现对机器人的系统控制。
如下是螺旋管道机器人的程序说明:
电机123
电机4
舵机123
按键说明1复位电机4正转收缩
2复位6舵机初始90度
3装机器人电机反转伸长固定好机器人
4慢速舵机正转:
(5度)
5中速舵机正转:
(15度)
6快速舵机反转:
(25度)
7上升电机123正转
8下降电机123反转
开始
If(按键1)
{
电机4正转收缩;(延时)
}
If(按键2)
{
舵机初始0度;()
}
If(按键3)
{
电机反转伸长固定好机人;
}
Else
{
If(按键4)
{
舵机初始0度
舵机旋转5度,
}
If(按键5)
{
舵机初始0度
舵机旋转15度
}
If(按键6)
{
舵机初始0度
舵机旋转25度
}
Else
{
If(按键7)
{
电机正转;(延时)上升
}
If(按键8)
{
电机反转;(延时)下降
}
Else
{
电机4正转收缩;()
舵机初始0度;()
}
}
}
参考文献
[1]赵丽艳樊友民主编.机器人制作宝典.北京:
航空航天大学出版社,2004
[2]宗光华主编.机器人的创意设计与实践.北京:
北京航空航天大学出版社,2004
[3]肖南峰编著《智能机器人》.华南理工单靴出版社,2008
[4]张国良敬斌刘延飞熊磊主编.自主移动机器人设计与制作.西安:
西安交大出版社,2002
 升级会员
升级会员 