控制工程基础第三版机械工业出版社课后答案.docx
《控制工程基础第三版机械工业出版社课后答案.docx》由会员分享,可在线阅读,更多相关《控制工程基础第三版机械工业出版社课后答案.docx(33页珍藏版)》请在冰豆网上搜索。
控制工程基础第三版机械工业出版社课后答案
控制工程基础习题解答
第一章
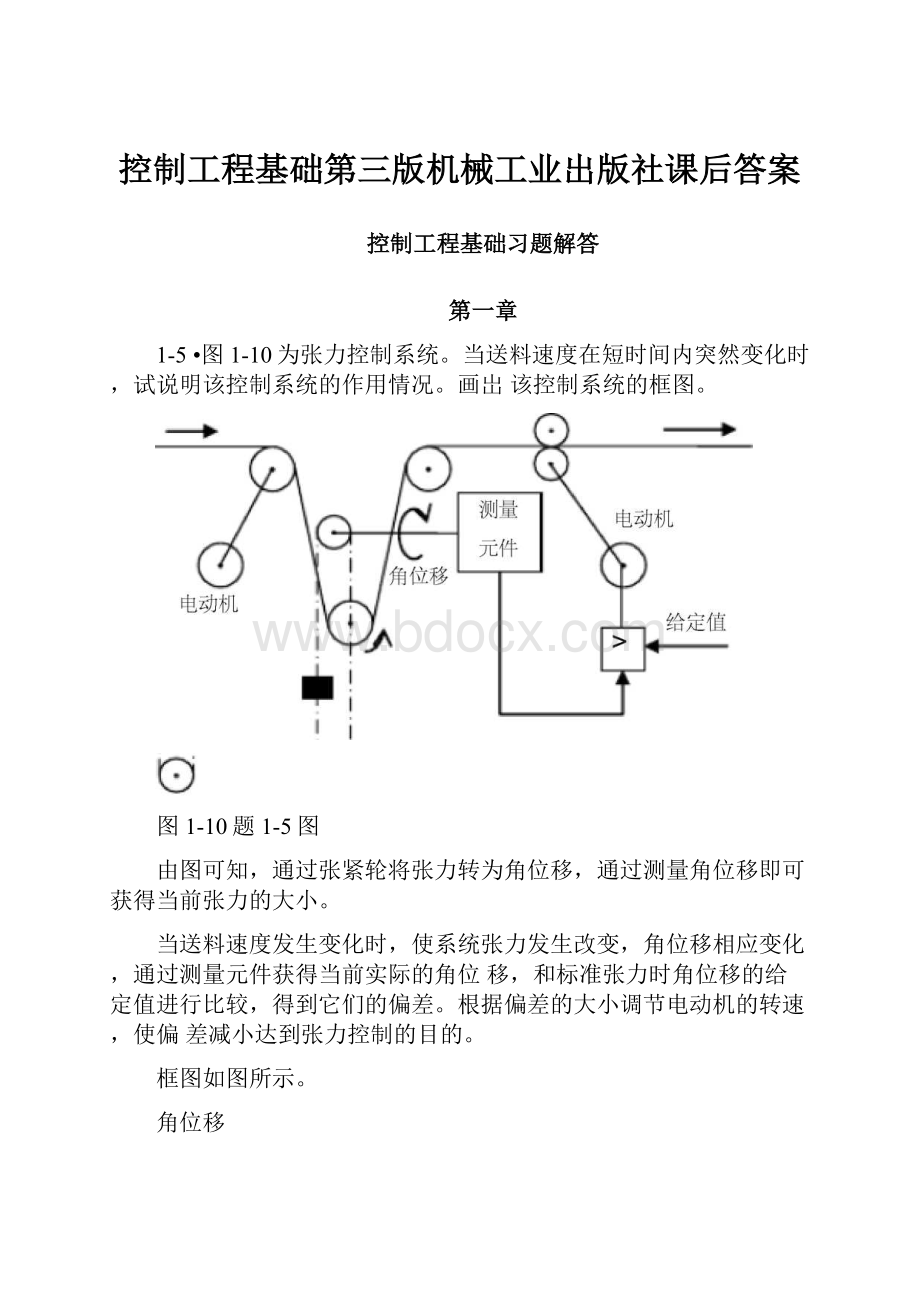
1-5•图1-10为张力控制系统。
当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。
画岀该控制系统的框图。
图1-10题1-5图
由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。
当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。
根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。
框图如图所示。
角位移
题1-5框图
1-8•图1-13为自动防空火力随动控制系统示意图及原理图。
试说明该控制系统的作用情况。
2-
图1-13题1-8图
该系统由两个自动控制系统串联而成:
跟踪控制系统和瞄准控制系统,由跟踪控制系统获得目标的方位角和仰角,经过计算机进行弹道计算后给岀火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。
跟踪控制系统根据敏感元件的输岀获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输岀,使视线始终对准目标,实现自动跟踪的功能。
瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。
控制工程基础习题解答
第二章
2-2•试求下列函数的拉氏变换,假定当t<0时,f(t)=O。
⑶.ft心.5tcos10t
解:
Lft】=L匸朋coslOt0.5
(^0.5)+100
解:
L〔f(t)】=L;sin5t
L^sin5t-^cos5t
3[|[22
2-6
•试求下列函数的拉氏反变换。
⑷.
2
s5s2
F")=(s+2Xs2+2s+2)
解:
2
s5s2
2
s5s2
ki!
L】s2s22s2
s+2)
2
2s225
.jk1k?
ska
—L-2
Is2s2s2
2
s5s2
k2s+k3s=_1_j=[(s+;点2:
+2产+2*"
-3-3jo.
L」
(8).
解:
L4
Fs"「三
Fs=—
s2「2s5
3s3
s22s2
-L"
2卜3(s+1)1]s+2(s+1f+1_
.2tt,
--2e3ecost
-
_s2-2s+5一
'LP(s—1"2
2丄s-1〕
、2「2(s-1)2+22
1
etsin2t-etcos2t
2
Uos
2-13试求图2-28所示无源网络传递函数
Ui(s)
Cl
Ri
解:
b).用等效阻抗法做:
拉氏变换得:
Ui(t)
i(t)
订C2
丁
R2
Uo(t)
b)
图2-28题2-13图
Uo
Ri
R2
C2s
1
C1s
Ui
C1R-!
s1C2R2s1|
C2R1S亠〔C1R1sTC2R2S1
传递函数为
1
C1s
R1
r2
G(GR1S+1]C2R2S^1)
C2R|s+(CRs+1(C2R2s+1)
2-16试求图2-3o所示有源网络传递函数UoS
Ui(s)
R2
解:
rO
C1
r
R3
Uo
=H3R4
1上水」2只3
I2
i1
Ui
飞
.i3
Uo
C2
q(s)
I1
Ro
R1
I3
Uo(s)
o
1
i3R4i3dt
C2
r
Uo=—I3R4
I1
"R1
=[1T3
1
I3R4
C2s
R2
I2
C1
di3R4+1hdt
lC2'丿
I3—I2R3
C2s
dt
Ui
R1
b)
图2-30题2-16图
1CR4SI3也
C2
R2C2s
Ui
_R1
Ui
2
R4C2s1C1C2R2RtSC1R2sR1
R4C2S1C1C2R2R4S2C1R2SR2C2SUi
R4C2s1C1C2R2R4s2C1R2sR
R2C2s
RtC2s1R4C2S1CCRRSGR2sR2C2s
^R4C2^hVhC1C2R2R4s^hC1R2sC2s
2i
C1C2R2R3R4s+GR2R3s+R3R4C2s+R2R3C2s+R2R4C2s+R2+R3Ui
C1C2R2R4s2C1R2sR4C2s1
RtC2s1C1C2R2R4s2C1R2s
Uos
Uis
R2R3R4C1C2
R2'R3
+r2R3C2+R2R3G+R3R4C2)*1
R2'R3
R2'R3
2
R2R4C1C2s亠1R2GR4C2s1
Ri
图2-31题2-17图
2-39b进行比较
3-
17.组合机车动力滑台铳平面时,当切削力Fi(t)变化时,滑台可能产生振动,从而降低被加工工件的切削表面质量。
可将动力滑台连同铳刀抽象成如图所示的质量-弹簧-阻尼系统的力学模型。
其中m为受控质量,匕,k2分别为铣刀系统,xo(t)为输岀位移。
试建立数学模型。
解:
微分方程为:
Fit-k2X1t-xot二码t
k2X1t-Xot=叭tfxot
拉氏变换得:
‘2fs+匕+k2r\
Fj(s)=ms2+fs+匕Xo(s)
Ik2丿
传递函数为:
k2
mfs3亠Kk2ms2k2fsk1k2
2-25•试求图2-39a所示机械系统的传递函数,画出其函数框图,与图
解1:
微分方程为:
01(t)
k1
J1
a)
b)
图2-39题2-25图
kiKt一^t—k23t-山t二J"t
k2刊t-V。
t-f-0t=J2二0t
拉氏变换得:
J1孑J2S2+fS+k2+(ki+k2严2:
fs+k2_k2・(s)=g(s))
传递函数为:
k1k2
G(S戶JJ2S4+fJiS‘+(k』2+k2Ji+k2」2S2+(«+k2fs+kik?
解2:
画出框图如图所示,通过框图简化可得传递函数为:
0i(s)
0i(s)
2-28•化简图2-42所示各系统框图求传递函数。
c).
H2
G2G3
iG2Hi■G2G3H2
G2G3
1G2Hi
G2
G3
Gi
+
G4
H2
H
G4
G4
Xo
+
Gi
Gi
Xo
Xo
Hi
Xi
1
G3
c)
图2-42题2-28图
Hi
G3
GiG2G3
1G2HiG2G3H2-GGzHi
G1G2G3
1G2HG2G3H—G1G2H1
第三章
4-2•假设温度计可用1/(Ts+1)传递函数描述其特性。
现用该温度计测量某容器中的水温,发现经1min
后才能指示出实际水温的96%,问:
(1).该温度计的指示从实际水温的10%变化到90%所需的时间是多少?
(2).如果给该容器加热,使容器内水温以0.1'C/s的速度均匀上升,当定义误差e(t)=r(t)-c(t)时,温度计的稳态指示误差有多大?
解:
(1).设实际水温为Tr,温度计原来处于0度,当温度计放入水中时,相当于输入一阶跃值为Tr的阶
60
根据题意可得:
0.96=1_eT
tr=t2-11=40.96s
响应分析可知,单位斜坡响应的稳态误差为T,所以稳态指示误差:
lime(t)=01汉T=1864C
(将1/(Ts+1)转化为开环传递函数为1/(Ts)时的单位反馈系统,则可见此时系统的误差为
e(t)=r(t)-c(t)。
根据系统为I型,可得稳态速度
1Q
Qsv=0.10.1T=1.864C)
Kv
3-5.某控制系统如图3-24所示,已知K=125,试求:
(1).系统阶次,类型。
(2).开环传递函数,开环放大倍数。
(3).闭环传递函数,闭环零点、极点。
(4).自然振荡频率3n,阻尼比Z,阻尼振荡频率3do
(5).调整时间ts(△=2%),最大超调量bp%
(6).输入信号r(t)=5时,系统的输出终值c(3)、输
图3-24题3-5图
出最大值Cmax
(7).系统的单位脉冲响应。
(8).系统的单位斜坡响应。
(9).静态误差系数氐、K、Ka。
(10).系统对输入为r(t)=5+2t+t2时的稳态误差。
解:
0.2K0.0125K1.5625
(1).系统的开环传递函数:
GsHs,可见系统
4Ss+4)s(0.25s+1)s(0.25s+1)
阶次为二阶,类型为I型。
(3)
.闭环传递函数为:
(4)
闭环极点为:
q,2=—2±1.5j
n=2.5,=0.8,二n1-2=1.5
因为标准型二阶系统单位阶跃信号的稳态输出为1,最大值为1+M=1+"%=1.015,由于线性系
统符合叠加原理,所以可得:
C「]:
5*5=25,Cmax=5*5*1.015=25.375
1.■-
c(t)=1-」/锻sin⑷dt+arctan
所以系统单位阶跃响应为:
ct=51-5e』sin1.5t•0.6435
13」
利用线性系统的重要特征即可得单位脉冲响应:
C竽匚晋宀in1.5t0.6435一2.5宀。
s1.5t0.6435
Ssin1.5t
6
-20.833e^tsin1.5t
)dt
82t2t
-5t-esin1.5t0.64352ecos1.5t0.6435C
3
14_2t16_2t
二5tesin1.5tecosl.5tC
155
10
-5te'tsin1.5t1.287C
3
积分常数c由初始状态为零的条件而得,即
Cv0=0=5t10e^tsin1.5t1.287C
一3tz0
可得C=-3.2,所以单位斜坡响应为:
142162
cvt=5tesin1.5tecos1.5^3.2
155
102t
-5tesin1.5t1.287-3.2
3
(9).由于系统为I型,所以其静态误差系数分别为:
Kp=g
Kv=1.5625
Ka=0
(10).系统对输入为r(t)=5+2t+t2时的稳态误差为:
系统是二阶系统,开环传递函数中的系数均大于零(或由闭环传递函数中可知极点的实部小于零),所以系统稳定
111
ess=5汉5+2一+2一=临
(1+KpKvKay
3-16•已知开环系统的传递函数如下(K>0),试,用罗斯判据判别其闭环稳定性,并说明系统在s右半平
面的根数及虚根数。
(1).
GsHs二Ks1
s(s+2(s+3)
(6).
GsHs2£
S2(s2+8s+24)
解:
5
4
6K
5
K
闭环传递函数为32
s+5s+16s+10a
用罗斯判据可得:
3
s
2
s
1
s
0
s
16
-2a
10a
系统稳定,则应:
16
10a
16一2_0,即a值应为:
0»8
10a-0
(2).令s1
"s1,即s=s1一1,此时当Res10时,则Res乞T。
对闭环传递函数进
行变换得:
1s,;2s129s10a-12
S1
2
s1
系统稳定s,
0
s1
15-5a
10a-12
Res乞-1。
即a值应为:
(3).
3-27
(1).
(2).
解:
(1)
10a-12
1.2:
:
:
a:
:
:
3
则应:
「15—5a>0“t
10a-1220,此时,
由
(1)和
(2)可得,此时a应在(0,1.2)和(3,8).已知系统的结构如图3-34所示。
要求系统动态性能指标
在上述K”K2之值下计算系统在r(t)=t
之间。
K1、K2的值。
bp%=16.3%ts=1s,试确定参数
作用下的稳态误差。
系统的开环传递函数为:
10K1
GSASs+(10K2+1))
s
系统的闭环传递函数为:
10K1
10K1
1OK21
10K21s1
^210K21s10K1
n=JOK1
10K21
^10K1
得:
=0.5」0K2—1
2J1OK1
5%寸:
ts
--n
%10K11°^
2J10K,
6
10K21
系统稳定Ki应大于零,所以K1=3.6
得:
K2=0.5,则:
K1=3.6,由系统传递函数可知,
此时:
■=6rad/s
附-0.5
448
2%寸:
ts1
n..10K110K2110K21
2J10Q
得:
K2=0.7,则:
K1=±6.4,由系统传递函数可知,系统稳定K应大于零,所以K1=6.4。
此时:
■n=8rad/s
-0.5
10K
系统是二阶系统,闭环(或开环)传递函数中的系数均大于零(或由闭环传递函数中可知极点的实部
小于零),所以系统稳定
系统为1型essv
Kv
当K1=3.6,K2=0.5时,开环放大增益为:
当K1=6.4,K^=0.7时,开环放大增益为:
10K1
10K21
X
解
解
图4-15题4-2图
无有限开环零点。
示如图
*
-5
-2.33
法则2
法则3
法则4
法则5
法则6
:
有三条趋向无穷的根轨迹。
:
实轴上的根轨迹:
:
渐近线相角:
:
渐近线交点:
:
分离点:
dK1
ds
得:
1802q1
-a
180(2q+1)180q=1
.160q=0
PiZj
jm
n-m
—a;
3
—2.33,得渐近线如图示。
K^-ss2s5A-Is37s210s
ds37s210^-3s214s10^0
ds
-14一142-4310-7_.19
2
其中s1
-7.19
3
--0.88为实际分离点
如图示
(2)
法则8:
虚轴交点:
令s=j■代入特征方程s37s210sK^0,得:
-j3-72j10:
\亠©=0
f3
—jco3+j10仙=0
52
i_7eo2+&=0d=±用“3.16
Ki=70
综上所述,根轨迹如图红线所示。
Kis2
s22s10
法则6:
分离点:
/s2+2s+10
K1
s+2
ds
其中S1--5.16为实际分离点,如图示
法则7:
出射角:
二arctan-^一90=-18.4
2—1
得円二1802q1=161.6
法则1:
对称性可得:
\1616
p2
综上所述,根轨迹如图红线所示。
4-9
已知某单位负反馈系统的开环传递函数为
Gs=2K1
s(s+14s+45)
(1)系统无超调的Ki值范围。
(2)确定使系统产生持续振荡的K值,并求此时的振荡频率
解:
开环极点为
Ri=0,P2,3=-7±2=*
-5
-9
渐近线相角:
1802q11802q1
渐近线交点:
180q
l±60q
I.
Pi八Zj
j=1
0-5-9
14
:
-4.67。
「m
(1)分离点:
-s314s245s
dK1
ds
-3s228s45=0
得:
S1
_-28一282-4345
2
一14一61
2.06
7.27
此时K1---2.063一14一2.062一45-2.0642.03。
(2)虚轴交点:
令S=j,■代入特征方程s3-14s245s=0,得:
32
-j•「14,j45心亠Kr=0
f3
-j©+j=0
—14豹2+Kr=0
co=±3J5彩±6.7
心=630
由根轨迹图可得:
(1)系统无超调的K值范围为保持所有根轨迹在负实轴时(分离点之前的部分),即
K1=0>42.03。
(2)确定使系统产生持续振荡的K值为与虚轴交点时,即K1=630。
此时的振荡频率为无阻
尼自然频率,即闭环极点的虚部:
=6.7。
4-10设单位负反馈系统的开环传递函数为
Gs
s2(s+2)
(1)
(2)
解:
试绘制根轨迹的大致图形,并对系统的稳定性进行分析。
若增加一个零点z=-1,试问根轨迹图有何变化,对系统的稳定性有何影响。
(1)
画系统的根轨迹,如图红线所示。
其中:
渐近线相角:
1802q11802q1
渐近线交点:
Pi
<54
180q=1
二60q=0
n—m
:
-0.67。
3
K1=0时处于临界稳定之外,系统均处于不稳定状态。
(2)增加一个零点z=-1后的根轨迹如图蓝线所示。
可见系统除在
其中:
渐近线相角:
半=J80(2q+1)=J80【2q+1),90
n「m2
渐近线交点:
广a
nm
'PiZj
y2_0_21
n-m2
--0.5。
2
使根轨迹向左移动进入左半平面,由根轨迹图可知此时除在K,=0时处于临界稳定之外,系统均
处于稳定状态。
即系统增加的零点使系统的稳定性获得了改善,由原不稳定系统变为了稳定系统。
 升级会员
升级会员 