ABB指令集及作用.docx
《ABB指令集及作用.docx》由会员分享,可在线阅读,更多相关《ABB指令集及作用.docx(20页珍藏版)》请在冰豆网上搜索。
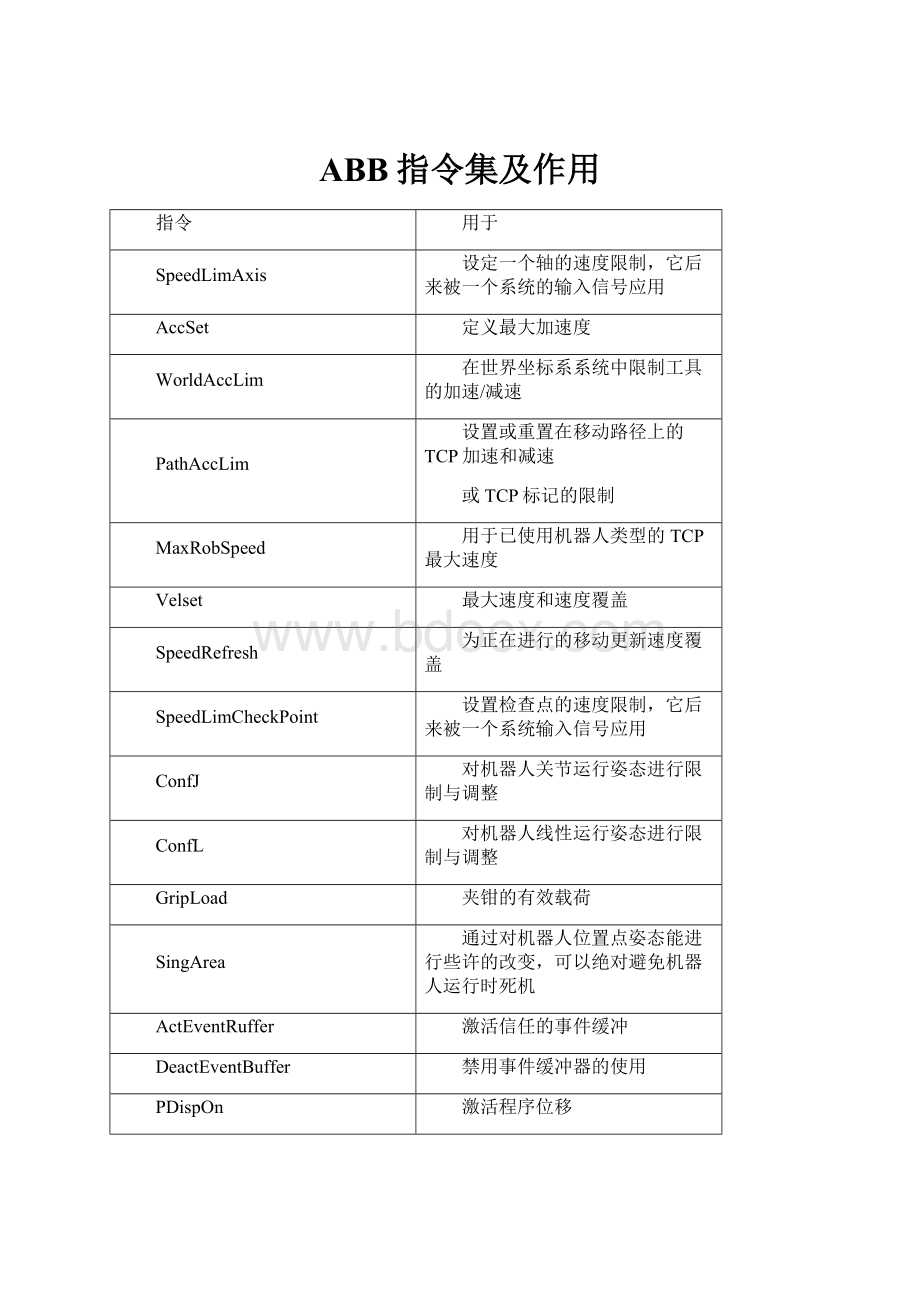
ABB指令集及作用
指令
用于
SpeedLimAxis
设定一个轴的速度限制,它后来被一个系统的输入信号应用
AccSet
定义最大加速度
WorldAccLim
在世界坐标系系统中限制工具的加速/减速
PathAccLim
设置或重置在移动路径上的TCP加速和减速
或TCP标记的限制
MaxRobSpeed
用于已使用机器人类型的TCP最大速度
Velset
最大速度和速度覆盖
SpeedRefresh
为正在进行的移动更新速度覆盖
SpeedLimCheckPoint
设置检查点的速度限制,它后来被一个系统输入信号应用
ConfJ
对机器人关节运行姿态进行限制与调整
ConfL
对机器人线性运行姿态进行限制与调整
GripLoad
夹钳的有效载荷
SingArea
通过对机器人位置点姿态能进行些许的改变,可以绝对避免机器人运行时死机
ActEventRuffer
激活信任的事件缓冲
DeactEventBuffer
禁用事件缓冲器的使用
PDispOn
激活程序位移
PDispSet
通过指定一个值来激活程序位移
PDispOff
禁用程序位移
ROffsOn
激活额外的轴偏移
EOffsSet
通过指定一个值来激活额外的轴偏移
pefpFTtate
从三个位置计算一个程序位移
DefFrame
从六个位置上的一个程序位移
ORobT
从一个位置移除程序位移
DefAccFram
从原来的位置和移位的位置定义一个框架
SoftAct
软化机器人伺服,软化值0——100
SoftDeact
停用软伺服
DitherAct
软伺服机构
DitherDeact
软伺服器的禁用功能
TuneServo
机器人调优值
TuneReset
重置调整正常
Pathpegol
调整几何路径
CirPathMode
选择工具重新定位的在圆弧中插入
Tunetype
将调优类型表示为一个符号常量
WZBoxDef
定义一个立体矩形的全局区域
WZCylDef
定义一个圆柱体全局区域
WZSphDef
定义一个球形全局区域
WZHomeJointDef
定义在关节坐标下一个全局区域
WZLimJointDef
在关节坐标下定义一个区域,以限制工作区域
WZLimSup
为一个全局区域激活限制
WZDOSet
激活全局区域设定一个数字输出
WZDisable
解除对临时全局区域的监督
WZEnable
激活对临时全局区域的监督
WZFree
消除对临时全局区域的监督
Wztemporary
确定一个固定全局区域
Shapedata
描述一个全局区域的几何形状
WaitRob
等待机器人和外部轴到达停止点或速度为零
Motsetdata
运动设置,除了程序位移
Progdisp
程序位移
MoveExtJ
在没有TCP的情况下移动一个线性或旋转的附加轴
MoveCDO
机器人圆弧运动时,并路径中输出一个数字信号
MoveJDO
机器人关节移动,在路径中输出一个数字信号
MoveLDO
机器人线性运动时,在路径中输出一个数字信号
MoveCSync
将机器人圆弧移动并执行快速程序
MoveJSync
将机器人关节移动并执行快速程序
MoveLSync
将机器人线性移动并执行快速程序
Searching
寻位运动,机器人在运动过程中搜索位置并通过计算得出程序偏移
SearchC
TCP沿着圆形路径移动
SearchL
TCP沿着线性路径移动
SearchExtJ
没有TCP的关节联合运动
TriggIO
定义一个触发条件,并在特定位置输出
TriggInt
定义一个触发条件,并在给定的位置执行一个陷阱程序
TriggCheckIO
在给定位置定义一个输入/输出检查
TriggEquip
定义一个触发条件,在给定位置设置输出,并有可能对外部设备延迟的时间补偿
TriggRampAO
定义一个触发条件,在给定的位置增加或降低模拟输出信号,并有可能包括对外部设备延迟的时间补偿
TriggC
机器人TCP圆弧运行激活一个触发信号
TriggJ
机器人关节运行激活一个触发信号
TriggL
机器人TCP线性运行激活一个触发信号
TriggLIOs
机器人TCP线性运行激活输入/输出触发信号
StepBwdPath
在重新启动的事件例程中向后移动它的路径
TriggStopProc
在系统中创建一个内部监督,以实现指定的过程信号的零设置,并在系统中每一个程序停止或紧急停止中,在指定的持久变量中生成重新启动数据
triggdata
触发条件
aiotrigg
模拟输入/输出触发条件
restartdata
例行程序触发停止数据
triggios
TriggLIOs触发条件
triggstrgo
TriggLIOs触发条件
triggiosdnum
TriggLIOs触发条件
TriggSpeed
定义控制模拟输出信号的条件和动作,输出值与实际的TCP速度成正比
StopMove
停止移动
StartMove
重新启动机器人运动
StopMoveReset
重置停止运动状态但不重启机器人运动
StartMoveRetry
重启机器人运动,并在不可分割的序列中重试
StorePath
存储最后一条通用的路径
RestoPath
重新生成早先存储的路径
ClearPath
在当前运动路径水平上清除整个运动路径
PathLevel
获得当前路径级别
SyncMoveSuspendi
在storepath水平上暂停同步协调动作
SyncMoveResumei
在StorePath水平上恢复同步协调动作
IsStopMoveAct
获取停止移动标志的状态
RobName
如果有的话,在当前的程序任务中获取受控的机器人名称。
ROB_ID
如果有的话,获取包含对受控机器人的引用的数据
DeactUnit
关闭外部机械装置
ActUnit
启动一个外部机械装置
MechUnitLoad
定义一个机械单元的有效载荷
GetNextMechUnit
机器人系统中机械装置的名称
IsMechUnitActive
检查机械装置是否被激活
IndCMove
将轴改为独立模式,并将轴移动到绝对位置
IndCMove
将轴改为独立模式,并使轴向连续移动
IndDMove
将轴改变为独立模式,并移动轴向三角形的距离
IndRMove
将轴改为独立轴模式,并将轴移动到相对位置
IndReset
改变一个轴到从属模式或重新设置工作区域
HollowWristReset
重置腕关节在空腕上的位置
IndInpos
检查一个独立的轴是否处于位置
IndSpeed
检查一个独立的轴是否达到了设定的速度
CorrDiscon
断开先前连接的校正生成器的连接
CorrClear
移除所有连接的校正器
CorrRead
读取所有连接校正生成器所提供的全部修正
PathRecStart
开始记录机器人的路径
PathRecStop
停止记录机器人的路径
PathRecMoveBwd
将机器人沿记录的路径向后移动
PathRecMoveFwd
将机器人沿记录的路径向前移动
PathRecValidBwd
检查路径记录器是否活动,是否有记录的反向路径可用
PathRecValidFwd
检查路径记录器是否可以用于前进
WaitWObj
在输送机上等待工作对象
DropWObj
在输送机上放下工作物件
IndCnvAddObject
用手动向对象队列中添加对象
IndCnvEnable
开始监视数字量输入,并在触发是执行索引动作
IndCnvDisable
系统停止监听数字量输入
IndCnvInit
建立索引传输功能
IndCnvReset
为了能够对索引传输器进行传输或执行移动指令,系统需要被设置为常规模式和这个指令完成,或在移动PP移至MAIN的时候
indcnvdata
用于建立索引传输函数的行为
WaitSensor
连接到启动窗口的一个对象,在一个触感器的设备单元上
SyncToSensor
启动或停止机器人运动与传感器运动的同步
DropSensor
断开与当前对象的连接
MotionSup
失效/激活运动监督
ParIdPosValid
用于参数识别的有效机器人位置
ParIdRobValid
用于参数识别的有效机器人类型
LoadId
工具或有效载荷的载荷识别
ManLoadId
外部机械手载荷识别
Offs
添加一个机器人位置的偏移量,表示与工作对象的关系
RelTool
添加一个偏移量,在工具坐标系中表示
CalcRobT
计算从Joninttarget坐标值
CPos
读取当前位置(只有X,Y,Z的机器人坐标)
CRobT
读取当前位置(完整的robotarget)
CJointT
读取当前的关节度数
ReadMotor
读取当前运动角度
CTool
读取当前工具数据值
CWObj
读取当前的wobjdata值
ORobT
从一个位置移除一个程序位移
MirPos
镜像的位置
CalcJointT
计算来自点位置的关节角度
Distance
两个位置之间的距离
PFRestart
检查在电源故障时路径是否被中断
CSpeedOverride
读取程序编辑器或Producton窗口中的操作员设置的速度覆盖。
InvertDO
转化信号输出的值
PulseDO
在输出信号上生成一个脉冲
Reset
重置一个数字输出信号(到0)
Set
设置一个数字输出信号(到1)
SetAO
改变模拟输出信号的值
SetDO
改变数字输出信号的值(例如high/low)
SetGO
改变一组数字输出信号的值
AOutput
读取模拟输出信号的当前值
DOutput
读取数字输出信号的当前值
GOutput
读取数字输出信号组的当前值
GOutputDnum
读取一组数字输出信号的当前值。
能够处理高达32位的数字组信号。
返回dnum数据类型中的读值。
GInputDnum
读取一组数字输入信号的当前值。
能够处理高达32位的数字组信号。
返回dnum数据类型中的读值。
WaitDI
等待一个数字输入被设置或重置
WaitDO
等待数字输出设置为重置时
WaitGI
等待一组数字输入信号被设置为一个值
WaitGO
等待一组数字输出信号被设置为一个值
WaitAI
等待模拟输入更少或更多时,才会有一个值。
WaitAO
等待模拟输出更少或更多时,才会有一个值
TestDI
测试数字输出是否设置
ValidIO
有效的输入输出信号
IODisable
禁用一个I/O模块
IOEnable
启用一个I/O模块
AliasIO
用别名定义一个信号
IOUnitState
返回IO单元的当前状态。
IOBusState
获得输入/输出总线的当前状态。
IOBusStart
启动一个I/O总线。
TPErase
清除示教器屏幕的操作符
TPWrite
在示教器屏幕显示写的文本
ErrWrite
在示教器上显示上写文本,同时将该消息存储在程序的错误日志中。
TPReadFK
给函数键标上标签,并读取按下哪个键
TPReadDnum
从示教器屏幕上读取一个值
TPReadNum
从示教器屏幕上读取一个值
TPShow
从示教器选择窗口中选择一个窗口
tpnum
用一个符号常量表示FlexPendant窗口。
UIMsgBox
写消息FlexPendant
从FlexPendant读取按下按钮
UIShow
在FlexPendant上打开一个应用程序
UIMessageBox
写消息FlexPendant
从FlexPendant上读取的优先按下按钮
UIDnumEntry
从FlexPendant上读取一个数值
UIDnumTune
从FlexPendant上调整一个数值
UIAlphaEntry
从FlexPendant上读取一个数值
UINumTune
从FlexPendant上调整一个数值
UIAlphaEntry
读取FlexPendant的文本
UIListView
从FlexPendant选择一个列表
UIClientExist
是FlexPendant连接到系统
Open
打开一个串行通道/文件,用于二进制传输数据
WriteBin
写入一个二进制串行通道/文件
WriteAnyBin
写入任何二进制串行通道/文件
WriteStrBin
将一个字符串写到二进制串行通道/文件
Rewind
将文件位置设置为文件的开头
Close
关闭通道/文件
ClearIOBuff
清除串行通道输入缓冲区
ReadAnyBin
从任何二进制串行信道读取
WriteRawBytes
将类型rawbytes的数据写入二进制串行通道/文件/文件总线
ReadRawBytes
从二进制串行通道/文件/文件总线读取类型rawbytes的数据
ReadBin
从二进制串行通道读取
ReadStrBin
从二进制串通道文件中读取一个字符串
ClearRawBytes
将rawbytes变量设置为0
CopyRawBytes
从一个rawbytes变量复制到另一个
PackRawBytes
将一个变量的内容打包成原始字节的“容器”
UnPackRawBytes
将rawbytes类型的“容器”的内容解压缩到一个变量中
PackDNHeader
将DeviceNet信息的头部数据打包到rawbytes的“容器”中
RawBytesLen
在rawbyte变量中获取有效字节的当前长度
SocketCreate
创建一个新连接
SocketConnect
连接到远程计算机
SocketSend
将数据发送到远程计算机
SocketReceive
从远程计算机接收数据
SocketClose
关闭连接
SocketBind
将一个连接绑定到一个端口(只有服务器应用程序)
SocketListen
监听连接(只有服务器应用程序)
SocketAccept
接收连接(只有服务器应用程序)
SocketGetStatus
得到当前连接状态
RMQGetSlotName
从一个给定的标识号获得一个快速消息队列客户端的名称,这是从一个rmqslot插槽中获得的
中断
CONNECT
将一个变量(中断标识)连接到中断例程
ISignalDI
来自数字输入信号的中断
ISignalDO
来自数字输出信号的中断
ISignalGI
来自一组数字输入信号的中断
ISignalGO
来自一组数字输出信号的中断
ISignalAI
来自模拟输入信号的中断
ISignalAO
来自模拟输出信号的中断
ITimer
定时中断
TriggInt
一个位置固定的中断(从动作选择列表中)
IPers
改变一个持久性的中断。
IError
在出现错误时,命令并启用中断
IRMQMessage
当一个指定的数据类型被快速接收时,中断消息队列
IDelete
取消(删除)一个中断
ISleep
禁用一个中断
IWatch
激活一个中断
IDisable
禁用所有中断
IEnable
使用所有中断
GetTrapData
在中断例程中,获取关于中断的所有信息,从而导致中断例程被执行。
ReadErrData
在一个陷阱例程中,为了获得关于错误的数字信息(域、类型和数字),一个状态的改变,或者一个警告,导致了中断例程被执行。
ERROR(错误)
RAISE
“创建”一个错误并调用错误处理程序
BookErrNo
制订一个新的快速系统错误编号。
EXIT
在发生致命错误的情况下停止程序执行
RETRY
重新执行导致错误的指令
TRYNEXT
按照导致错误的指令执行指令
RETURN
回到调用当前例程的例程。
RaiseToUser
从常规的步骤中,错误被提升到用户级别的错误处理程序
StartMoveRetry
一种替换两个指令开始移动和重试的指令。
它既恢复了运动,又重新执行了导致错误的指令。
SkipWarn
跳过最近请求的警告信息。
ResetRetryCount
重置计数的重试次数。
RemainingRetries
剩下的重试要做。
ErrLog
在示教器上显示一条错误信息,并将其写入机器人消息日志中。
ErrRaise
在程序中创建一个错误,然后调用例行程序的错误处理程序。
ProcerrRecovery
在机器人运动过程中产生过程错误。
System&time(系统与时间)
ClkReset
重置用于计时的时钟
ClkStart
启动一个用于计时的时钟。
ClkStop
停止计时的时钟。
ClkRead
读取用于计时的时钟
CDate
将当前日期作为字符串读取
CTime
把当前时间作为字符串读取
GetTime
将当前时间读取为数值
FileTime
检索最后一次修改文件的时间。
ModTime
为加载的模块检索文件修改时间。
ModExist
检查程序模块是否存在。
ProgMemFree
检索例行程序内存的大小。
Clear
确定的值
Add
添加或减去一个值
Incr
递增1
Decr
递减1
Abs(AbsDnum)
计算绝对值
Round(RoundDnum)
圆的数值
Trunc(TruncDnum)
整除的数值
Sqrt(SqrtDnum)
计算平方根
Exp
用“e”来计算指数值
Pow(PowDnum)
用任意的基底来计算指数值
ACos
计算弧余弦值。
ASin
计算弧正弦值。
ATan
计算范围内的弧正切值-90,90度
ATan2
计算范围-180,180度的弧正切值
Cos
余弦值计算
Sin
正弦值计算
Tan
正切值计算
EulerZYX
从一个方向计算欧拉角。
OrientZYX
从欧拉角计算方向
PoseInv
反转一个姿势
PoseMult
乘以一个姿势
PoseVect
把一个姿势和一个矢量相乘
Vectmagn
计算一个pos矢量的大小
DotProd
计算两个pos向量的点(或标量)乘积。
NOrient
非规范取向正常化(四元数)
StrDigCmp
两个字符串的数字比较,只有数字
StrDigCalc
在两个字符串上的算术运算
BitClear
在已定义的字节或dnum数据中清除指定的位。
BitSet
在一个已定义的字节或dnum数据中设置一个指定的位到1。
BitCheck(BitCheckDnum)
检查已定义字节数据中的指定位是否设置为1
BitAnd(BitAndDnum)
在数据类型字节上执行逻辑位和操作
BitNeg(BitNegDnum)
在数据类型字节上执行逻辑位否定操作。
BitOr(BitOrDnum)
在数据类型字节上执行逻辑位或操作。
BitXOr(BitXOrDnum)
在数据类型字节上执行逻辑位的或非操作。
BitLSh(BitLShDnum)
在数据类型字节上执行逻辑位向左移位操作。
BitRSh(BitRShDnum)
在数据类型字节上执行逻辑位右移位操作。
外部通讯
SCWrite
向上级计算机发送信息
MakeDir
创建一个新的目录。
RemoveDir
删除一个目录。
OpenDir
打开一个目录进行进一步的调查。
CloseDir
关闭一个与OpenDir保持平衡的目录。
RemoveFile
删除一个文件。
RenameFile
重命名一个文件。
CopyFile
复制一个文件。
ISFile
检查文件的类型。
FSSize
检索文件系统的大小。
FileSize
检索指定文件的大小
ReadDir
在目录中阅读下一个条目。
RAPIDsupportinstructions(快速支持指令)
GetSysData
获取当前活动工具或工作对象的数据和名称。
ResetPPMoved
在手动模式下移动程序指针的复位状态。
SetSysData
为指定的数据类型激活指定的系统数据名。
IsSysID
测试系统的身份。
IsStopStateEvent
获取关于程序指针(PP)移动的信息。
PPMovedInManMode
测试程序指针是否以手动模式移动。
RobOS
检查执行是否在机器人控制器(RC)或虚拟控制器(VC)上执行。
GetSysInfo
获取关于系统的信息。
ProgMemFree
获得自由程序内存的大小
ReadCfgData
读取指定系统参数的一个属性。
WriteCfgData
写出命名系统参数的一个属性。
WarmStart
当您从快速更改系统参数时重新启动控制器。
TextTabInstall
在系统中安装一个文本表。
TextTabGet
获取一个用户定义的文本表的文本表号。
TextGet
从系统文本表中获得一个文本字符串。
TextTabFreeToUse
测试文本表名(文本资源字符串)是否自由使用或不是。
ArgName
返回原始数据对象名称
GetTaskName
获取当前程序任务的标识,名称和编号
MotionPlannerNo
得到当前运动计划者的数量。
EventType
获取当前事件例程类型。
ExecHandler
获取执行处理程序的类型。
ExecLevel
得到执行水平。
SetAllDataVal
为某一特定语法的某一特定类型的所有数据对象设置一个新的值
SetDataSearch
连同GetNextSym数据对象一起可以从系统中检索。
GetDataVal
从一个用字符串变量指定的数据对象中获得一个值。
SetDataVal
为用字符串变量指定的数据对象设置一个值。
GetNextSym
与SetDataSearch数据对象一起可以从系统中检索。
GetServiceInfo
从系统中读取服务信息。
MToolRotCalib
校准移动工具的旋转。
MToolTCPCalib
为移动工具校准工具中心点(TCP)。
SToolRotCalib
校准工具中心点(TCP)和一个固定工具的旋转。
SToolTCPCalib
校准工具中心点(TCP)用于固定工具
CalcRotAxisFrame
计算一个旋转轴类型的用户坐标系统。
CalcRotAxFrameZ
当主机器人和附加轴位于不同的快速任务中时,计算一个旋转轴类型的用户坐标系统。
DefAccFrame
从原来的位置和移位的位置定义一个框架。
。
TestSignDefine
定义
 升级会员
升级会员 