自动控制原理现象分析概述.docx
《自动控制原理现象分析概述.docx》由会员分享,可在线阅读,更多相关《自动控制原理现象分析概述.docx(21页珍藏版)》请在冰豆网上搜索。
自动控制原理现象分析概述
第一章线性系统的时域分析
1.1典型环节的时域响应
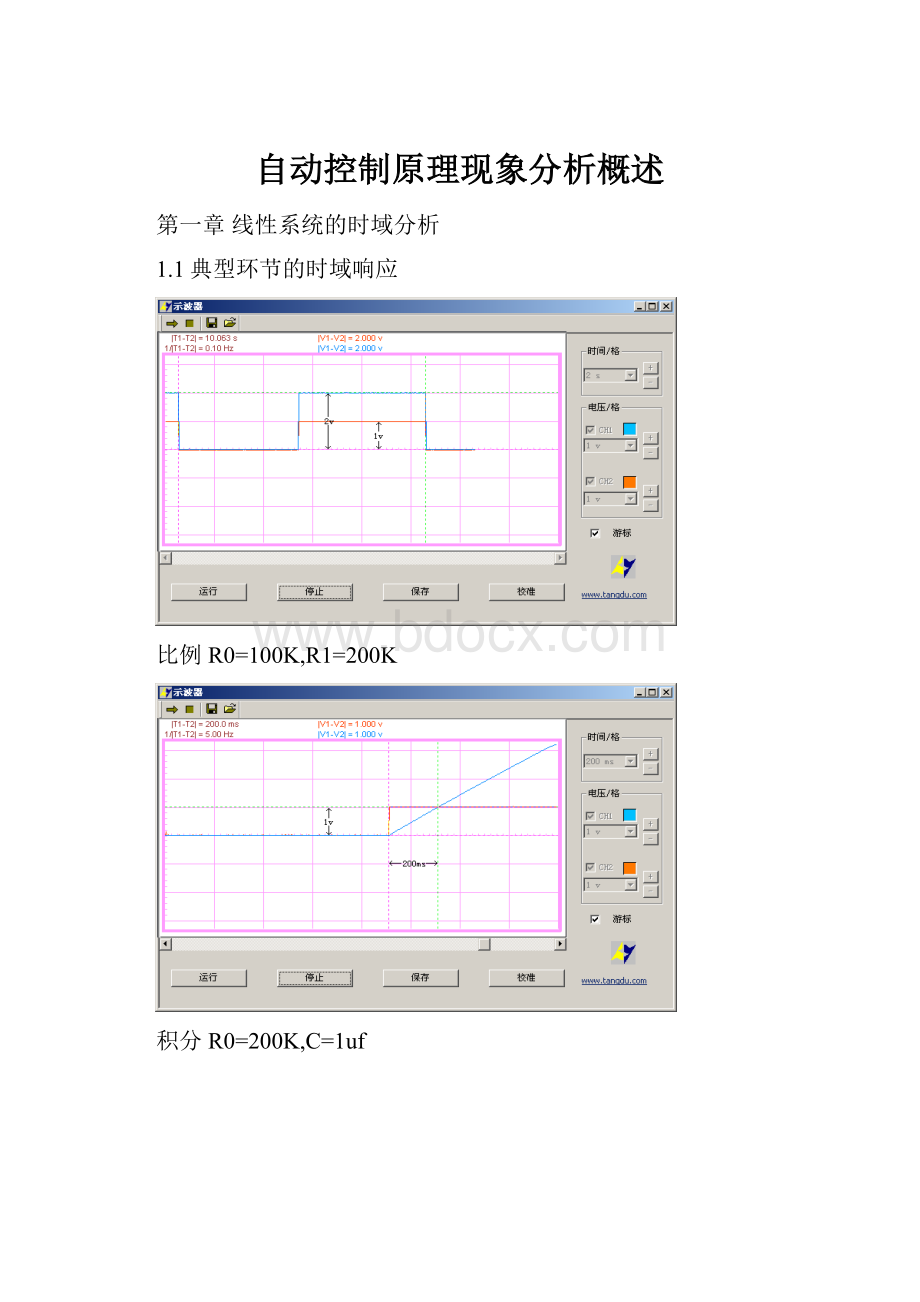
比例R0=100K,R1=200K
积分R0=200K,C=1uf
比例积分(R0=100K,R1=100K,C1=1uf)
一阶惯性R0=R1=200K,C=1uf
比例微分R0=R1=R2=100K,R3=10K,C=1uf
比例积分微分R0=R1=100K,R2=R3=10K,C1=C2=1uf
1.2典型系统的时域响应和稳定性分析
阻尼比小于1的二阶系统(R=10K)
阻尼比小于1的二阶系统(R=50K)
阻尼比等于1的二阶系统(R=160K)
阻尼比大于1的二阶系统(R=200K)
趋于稳定的三阶系统(R=100K)
临界稳定的三阶系统(R=40.8K)
发散不稳定的三阶系统(R=30K)
1.3线性系统的校正
系统校正前的时域响应
系统校正后的时域响应
第二章线性系统的根轨迹分析
2.1线性系统的根轨迹分析
根轨迹进入S左半平面,系统趋于稳定,此时R=218K
根轨迹位于虚轴上,系统处于临界稳定,此时R=164K
根轨迹进入S右半平面,系统发散不稳定,此时R=100K
第三章线性系统的频率响应分析
3.1线性系统的频率响应分析
采用直接测量法测得二阶闭环系统的波特图
采用间接测量法测得二阶开环系统的波特图
采用直接测量法测得二阶闭环系统的极坐标图
采用间接测量法测得二阶开环系统的极坐标图
第四章非线性系统的相平面分析
4.1典型非线性环节
继电特性
饱和特性
死区特性
间隙特性
4.2二阶非线性系统
继电型二阶非线性系统
加速度继电型二阶非线性系统
饱和型二阶非线性系统
注:
以上3个图为了清晰的观测到系统暂态过程,X_Y置于2V档,要想观察整个全过程,请置于5V档
4.3三阶非线性系统
继电型三阶非线性系统
饱和型三阶非线性系统
第五章采样系统的稳定性分析与校正
5.1采样系统的稳定性分析
采样周期20ms时信号未失真
采样周期200ms时信号失真
采样周期20ms时,二阶系统处于稳定状态,超调53%
采样周期60ms时,二阶系统处于稳定状态,超调67%
采样周期120ms时,二阶系统处于临界稳定状态
5.2采样控制系统的校正
系统校正前处于等幅振荡状态
校正后系统稳定
第六章线性系统的状态空间分析
系统在极点配置前的响应曲线
系统在极点配置后的响应曲线
第七章模拟PID闭环温度控制的设计与实现
温度单元的控制效果
 升级会员
升级会员 