一种面阵成像与激光扫描组合的三维成像测量系统0907.docx
《一种面阵成像与激光扫描组合的三维成像测量系统0907.docx》由会员分享,可在线阅读,更多相关《一种面阵成像与激光扫描组合的三维成像测量系统0907.docx(13页珍藏版)》请在冰豆网上搜索。
一种面阵成像与激光扫描组合的三维成像测量系统0907
说明书摘要
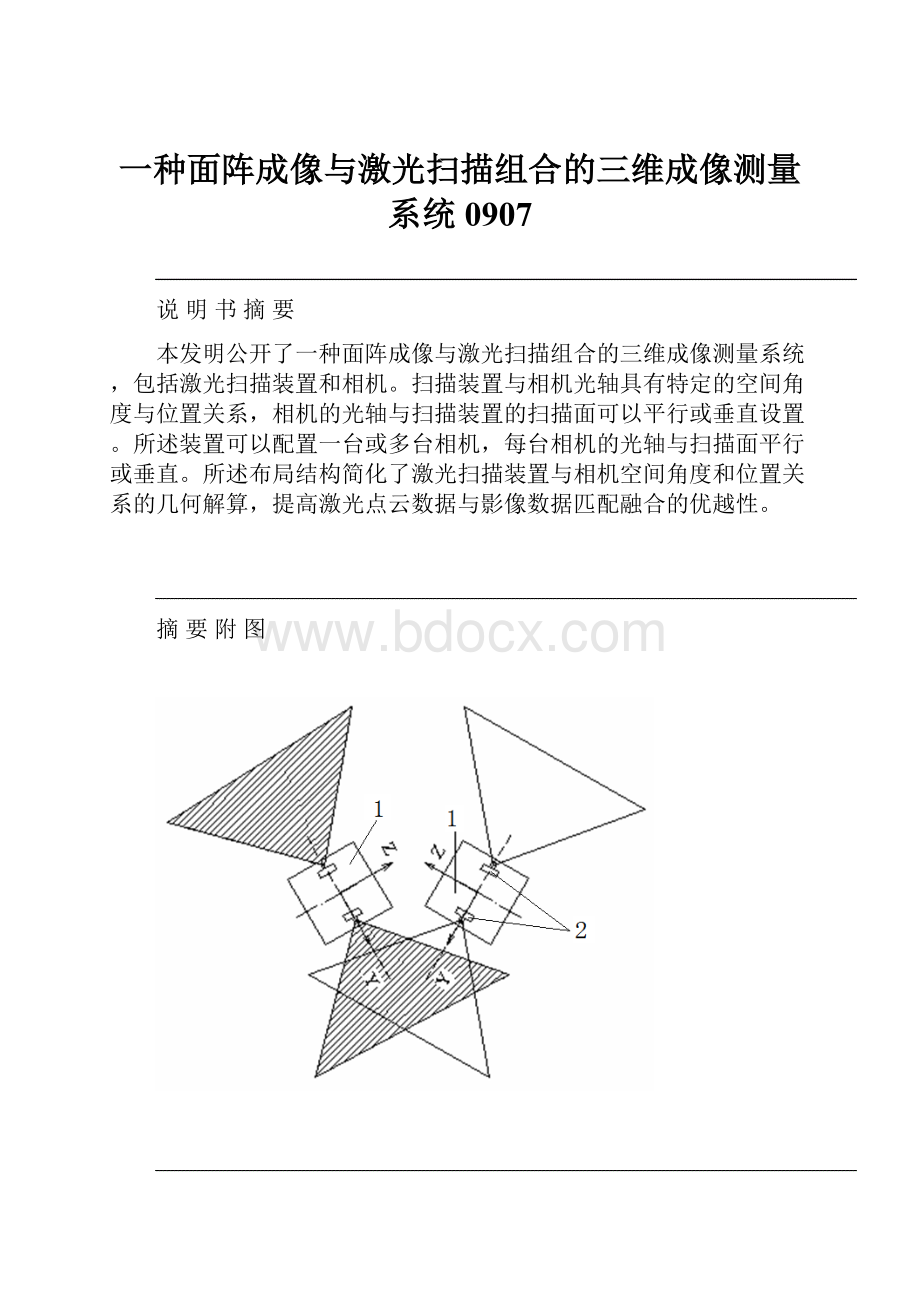
本发明公开了一种面阵成像与激光扫描组合的三维成像测量系统,包括激光扫描装置和相机。
扫描装置与相机光轴具有特定的空间角度与位置关系,相机的光轴与扫描装置的扫描面可以平行或垂直设置。
所述装置可以配置一台或多台相机,每台相机的光轴与扫描面平行或垂直。
所述布局结构简化了激光扫描装置与相机空间角度和位置关系的几何解算,提高激光点云数据与影像数据匹配融合的优越性。
摘要附图
权利要求书
1.一种面阵成像与激光扫描组合的三维成像测量系统,其特征在于,所述结构包括激光扫描装置和相机,激光扫描装置的扫描面(以下简称扫描面)与相机光轴具有特定的空间角度和位置关系。
2.根据权利要求1所述的一种面阵成像与激光扫描组合的三维成像测量系统,其特征在于,相机的光轴与扫描面平行。
3.根据权利要求1所述的一种面阵成像与激光扫描组合的三维成像测量系统,其特征在于,所述相机的光轴与扫描平面垂直。
4.根据权利要求2和3所述的一种面阵成像与激光扫描组合的三维成像测量系统,其特征在于,所述结构可以配置1台或多台相机,每台相机的光轴分别与激光扫描面平行或垂直。
5.根据权利要求1-7所述的一种面阵成像与激光扫描组合的三维成像测量系统,其特征在于,相机像平面坐标系与扫描机构的扫描坐标系的空间几何关系可以通过单次坐标旋转变换与坐标平移变换完成。
6换与单次主,所述设计高了的__________________________________________________________________________________________________________________6.根据权利要求1所述的一种面阵成像与激光扫描组合的三维成像测量系统,所述相机可以是商业相机,工业相机或各类相机模块。
说明书
一种面阵成像与激光扫描组合的三维成像测量系统
技术领域
本发明涉及一种激光扫描技术,尤其涉及一种一种面阵成像与激光扫描组合的三维成像测量系统
背景技术
激光扫描技术是空间数据获取的重要手段之一。
激光扫描装置获取扫描区域的激光点云数据,扫描装置上配置的相机采集扫描区域的影像数据,将获取的激光点云数据与影像数据进行匹配,对获取的目标的激光点云数据赋予RGB色彩信息,能够实现激光点云数据的实时渲染效果。
________________________________________________________________________________________________________________________________,计轴光雷达光轴与扫描_____________________________________________________________________________________________________________________本发明提出了一种一种面阵成像与激光扫描组合的三维成像测量系统,在扫描装置与相机的空间位置关系的几何解算过程中,相机的像平面坐标系与扫描装置的扫描坐标系的空间变换只需通过单次的坐标旋转和坐标平移变换完成,简化了对扫描区域的激光点云数据与相机的影像数据之间的数据匹配的解算过程。
发明内容
本发明的目的是提供一种能够提高扫描装置获取的点云数据与相机采集的影像数据之间的匹配解算的激光扫描装置与相机的空间布局结构。
本发明的目的是通过以下技术方案实现的:
本发明的一种面阵成像与激光扫描组合的三维成像测量系统,包括扫描装置与相机两部分,主要涉及扫描装置扫描面与相机光轴的布局结构。
扫描装置的扫描面与相机光轴具有特定的空间角度和位置关系,相机的光轴与扫描装置的扫描面满足平行关系,相机的光轴与扫描机构的扫描面满足垂直关系,通过设备的检校,可精确的检测相机的光轴与扫描面之间平行关系的角度偏差与垂直关系的角度偏差。
由上述本发明提供的技术方案可以看出,本发明所述的一种面阵成像与激光扫描组合的三维成像测量系统,由于扫描装置的扫描面与相机光轴具有特定的空间角度和位置关系,相机光轴与扫描装置的扫描面平行或垂直,相机像平面坐标系与扫描机构的扫描坐标系的空间几何关系只需通过单次坐标旋转和单次坐标变换完成,因此能够简化激光点云数据与相机影像采集数据的匹配解算,提高了扫描装置获取的激光点云数据与相机采集的影像数据融合的优越性。
附图说明
图1为本发明中相机与扫描机构位置关系示意图;
图2、图3、图4分别为本发明中单扫描装置与2台、4台、5台相机的位置关系示意图;
图3为本发明中双扫描装置与相机位置关系示意图。
具体实施方式
本发明的一种面阵成像与激光扫描组合的三维成像测量系统,其较佳的具体实施方式如图1与2所示:
包括激光扫描装置1和相机2两部分,图1中所述相机2的光轴a与激光扫描装置1的扫描平面b平行;图2中垂直所述相机2的光轴a与激光扫描装置1的扫描平面c垂直。
所述扫描装置可配置一台或多台相机,每台相机光轴分别与扫描面平行或垂直。
所述相机的像平面坐标系与所述扫描装置的扫描坐标系的空间几何关系只需通过单次坐标旋转变换和单次坐标平移变换完成。
所述相机可以是商业相机或工业相机或相机模块等。
本发明的一种面阵成像与激光扫描组合的三维成像测量系统,所述相机的光轴与扫描装置的扫描面平行或垂直,通过设备的检校,可精确的检测出相机的光轴与扫描装置的扫描面之间的平行与垂直关系。
每台扫描装置可以配置一台或多台相机。
具体实施例一,如图3所示,激光扫描装置1配置有2台相机,所述相机2与相机3的光轴平行且沿y轴背靠背设置,所述2台相机的光轴y与扫描装置的扫描平面b垂直。
具体实施例二,如图4所示,所述激光扫描装置配置有4台相机,所述4台相机中:
相机2与相机3的光轴平行且沿y轴背靠背设置,此2台相机的光轴与图中y轴平行,且与扫描装置的扫描面b垂直;
相机4与相机5的光轴平行且沿z轴背靠背设置,此2台相机的光轴与扫描装置的扫描面平行。
具体实施例三,如图5所示,所述扫描装置配置有5台相机,所述5台相机中:
相机2与相机3的光轴平行且沿y轴背靠背设置,此2台相机的光轴与图中y轴平行,且与扫描装置的扫描面b垂直;
相机4与相机5的光轴平行且沿z轴背靠背设置,此2台相机的光轴与扫描装置的扫描面b平行。
相机6的光轴与扫描装置的扫描面b平行,且与相机2、3、4和5的光轴垂直。
具体实施例四,如图6所示,2套扫描装置同时运行,每套扫描装置配置有2台相机,
在影像匹配时,根据扫描机构确定的坐标系下的激光点坐标、相机中心点坐标、相机视场角和相机安置姿态,即可计算出每个激光点落在哪一幅或哪几幅对应的影像内;再依据扫描机构坐标系下的激光点坐标、相机中心点坐标、相机安置姿态、相机焦距,通过摄影测量学中的共线方程,就可计算获得每一个激光点对应的影像坐标。
通过影像坐标进行色彩的插值计算,即可得到激光点对应的RGB色彩值。
在实际应用中,可在一台扫描装置上配置有多台相机以覆盖360°区域。
每台相机布局遵循相机的光轴与扫描装置的扫描面垂直或平行,多台相机的位置关系按设计角度分配,通常情况是按等角度间隔分布;
本发明针对目前激光点云数据与影像数据融合匹配的解算,提出了一种相机光轴与激光扫描装置的扫描面平行或垂直的布局结构,简化扫描装置与相机的空间关系的几何解算,简化了激光点云数据与相机影像数据匹配解算。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
说明书附图
图1
图2
图3
图4
图5
图6
公式推导:
一、当相机的光轴与激光扫描装置的扫描平面平行时:
如图二所示,设设备坐标系下测得的激光点坐标为
,设备在大地坐标系中的位置和姿态为:
,摄像机在大地坐标系中的位置和姿态为:
。
则大地坐标系下的激光点坐标为:
(1)
其中
设像点m在像平面坐标系下的坐标为
,在像空间坐标系中的坐标为
,则在像空间辅助坐标系中的坐标为:
(2)
在共线条件示意图中,S为摄影中心,它在大地坐标系下的坐标为
。
M为任一测得的激光点,大地坐标系下的坐标为
。
m为M在影像上的构像,相应的像空间坐标和像空间辅助坐标分别为
和
。
摄影时S、m、M三点位于一条直线上,那么有如下关系:
(3)
则
,
,
(4)
由式
(2)可知,像空间坐标与像空间辅助坐标有下列关系:
(5)
将
(1)式代入,上式展开为:
再将式(4)代入上式中,得
(6)
式中,x,y为激光点对应的像平面坐标;
X,Y,Z为扫描设备坐标系下测得的激光点坐标;
为扫描设备在大地坐标系中的坐标;
为摄像机在大地坐标系中的坐标。
通过上述共线条件方程式即可求出每一个激光点对应的影像坐标。
二、当相机的光轴与激光扫描装置的扫描平面垂直时:
如图一所示,设设备坐标系下测得的激光点坐标为
,设备在大地坐标系中的位置和姿态为:
,摄像机在大地坐标系中的位置和姿态为:
。
则大地坐标系下的激光点坐标为:
(1)
其中
设像点m在像平面坐标系下的坐标为
,在像空间坐标系中的坐标为
,则在像空间辅助坐标系中的坐标为:
(2)
在共线条件示意图中,S为摄影中心,它在大地坐标系下的坐标为
。
M为任一测得的激光点,大地坐标系下的坐标为
。
m为M在影像上的构像,相应的像空间坐标和像空间辅助坐标分别为
和
。
摄影时S、m、M三点位于一条直线上,那么有如下关系:
(3)
则
,
,
(4)
由式
(2)可知,像空间坐标与像空间辅助坐标有下列关系:
(5)
将上式展开为:
再将式(4)代入上式中,得
(6)
通过上述共线条件方程式即可求出每一个激光点对应的影像坐标。
 升级会员
升级会员 