Sl197《水利水电的工程的测量的要求规范》4平面的控制测量.docx
《Sl197《水利水电的工程的测量的要求规范》4平面的控制测量.docx》由会员分享,可在线阅读,更多相关《Sl197《水利水电的工程的测量的要求规范》4平面的控制测量.docx(21页珍藏版)》请在冰豆网上搜索。
Sl197《水利水电的工程的测量的要求规范》4平面的控制测量
Sl197-2013《水利水电工程测量规X》
4平面控制测量
4.1一般规定
4.1.1平面控制可分为根本平面控制、图根平面控制和测站点平面控制等,可采用GNSS测量、三角形网测量和导线〔网〕测量等方法。
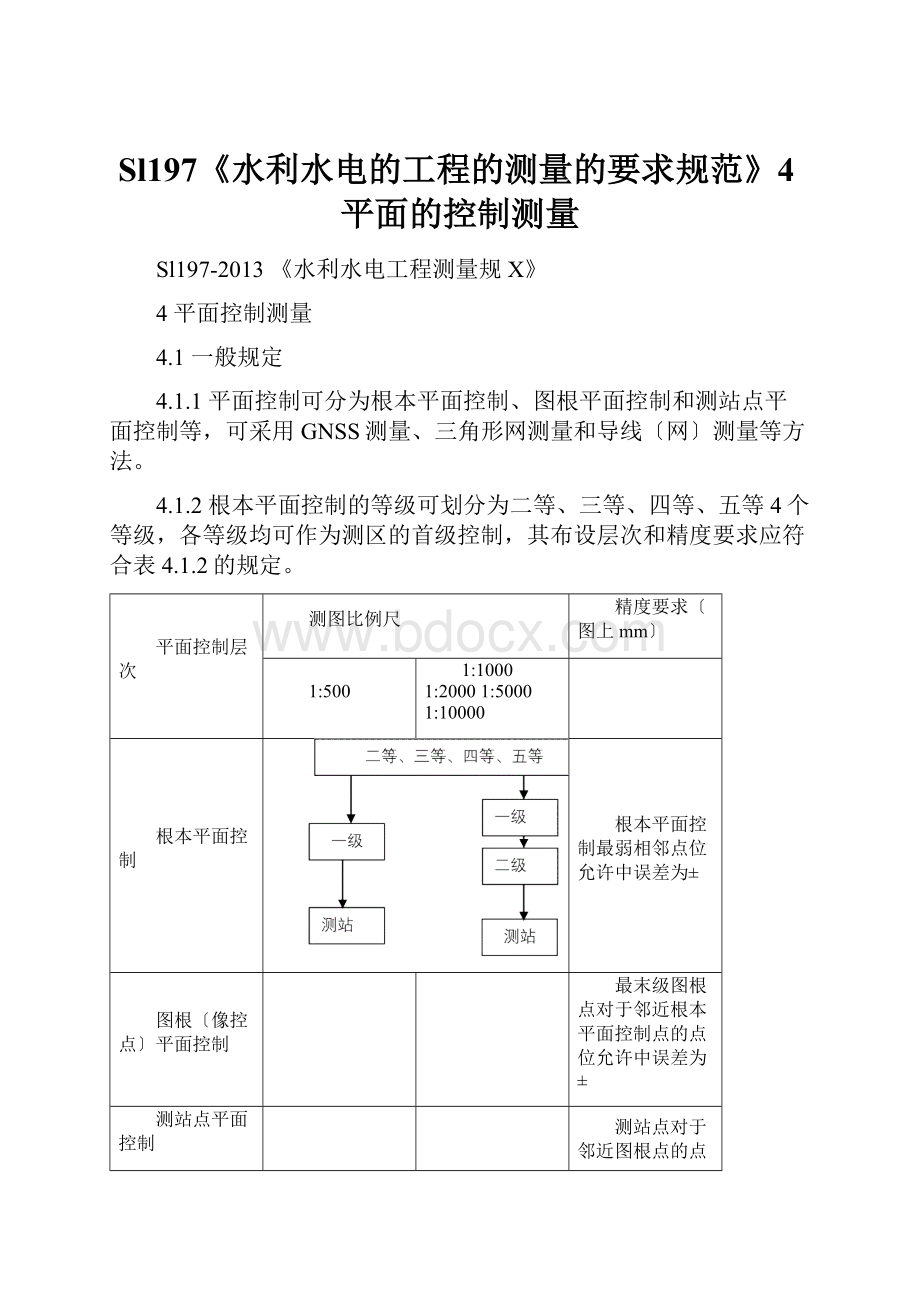
4.1.2根本平面控制的等级可划分为二等、三等、四等、五等4个等级,各等级均可作为测区的首级控制,其布设层次和精度要求应符合表4.1.2的规定。
平面控制层次
测图比例尺
精度要求〔图上mm〕
1:
500
1:
10001:
20001:
50001:
10000
根本平面控制
根本平面控制最弱相邻点位允许中误差为±
图根〔像控点〕平面控制
最末级图根点对于邻近根本平面控制点的点位允许中误差为±
测站点平面控制
测站点对于邻近图根点的点位允许中误差为±
注1:
当进展1:
500比例尺测图时,其二等、三等、四等、五等根本平面控制最弱相邻点点位允许中误差为±5cm。
注2:
条件有利时,可在根本平面控制的根底上直接加密测站点测图,较小测区,还可用图根控制作为首级控制。
注3:
在满足本标注精读指标的前提下,可逐级或越级布网。
4.1.3根本平面控制点均应埋设标志并绘制点之记,尺寸规格与要求应符合附录A的规定。
4.1.4全站仪测图图根控制点的密度,应满足测图需要,不宜小于表4.1.4的规定。
表4.1.4图根控制点密度
测图比例尺
1:
500
1:
1000
1:
2000
1:
5000
1:
10000
图根点数〔每km²〕
32
12
4
2
1
4.1.5平面控制测量内业计算中数字取位应符合4.1.5的规定。
等级
观测方向值与各项修正数〔°〕
边长观测值与各项修正数〔m〕
边长与坐标〔m〕
方位角〔°〕
二~四等
五等
1
1
图根
1
1
4.2GNSS测量
4.2.1GNSS测量控制网按精度可划分为五个等级,各等级控制网的相邻点间距与精度要求应按表4.2.1的规定执行。
表4.2.1GNSS测量控制网精读根基与相邻点间距规定
等级
相邻点平均间距〔km〕
固定误差a〔mm〕
比例误差b〔mm/km〕
最弱相邻点边长相对中误差
二等
8~13
≤10
≤2
1/150000
三等
4~8
≤10
≤5
1/80000
四等
2~4
≤10
≤10
1/40000
五等
0.5~2
≤10
≤20
1/20000
图根
0.2~1
≤10
≤20
1/4000
4.2.2GNSS网的设计应满足如下要求:
1各等级GNSS网可布设成多边形或附和路线,其相邻点最小距离不宜小于平均间距的1/3,最大距离不宜大于平均间距的3倍。
2新建GNSS网与原有控制网联测时,其联测点数不宜少于3点,分布宜均匀。
在需用常规测量方法加密控制网的地区,GNSS网店应成对布设,对点间相互通视。
3基线长度大于20km时,应采用GB/T18314中C级GPS网的时段长度进展静态观测。
4二等、三等、四等GNSS控制网应采用网连式、边连式布网;五等、图根控制网可采用点连式布网。
5GNSS控制网由非同步基线构成的多边形闭合环或附和路线的边数应满足表4.2.2的规定。
表4.2.2GNSS控制网非同步观测闭合环或附和路线边数规定
测量等级
二等
三等
四等
五等
图根
闭合环或附和路线的边数〔条〕
≤6
≤8
≤8
≤10
≤10
4.2.3GNSS点的点位应顶空开阔、视场内障碍物的高度角不宜大于15°,并远离大面积水域、大功率发射台或高压线,其距离不宜小于50m。
4.2.4各等级GNSS平面控制测量的主要技术要求应满足表4.2.4-1~表4.2.4-3的规定。
4.2.5GNSS测量作业时,应满足如下要求:
1GNSS天线安置的对中允许误差为2mm,天线高的量取应准确至1mm。
2观测中,应防止在天线周围使用无线电通信设备。
3作业过程中,应正确记录点名与编号、接收设备型号与序号、天线高、观测时间等信息。
4.2.6GNSS测量相对定位成果应符合如下要求:
表4.2.4-1GNSS静态测量的根本技术要求
等级
二等
三等
四等
五等
图根
接收机类型
双频
双频或单频
双频或单频
双频或单频
双频或单频
静态
卫星高度角
≥15
≥15
≥15
≥15
≥15
观测时段数
≥2
≥
≥
≥
≥1
观测时段长度〔min〕
≥90
≥60
≥45
≥30
≥15
有效观测卫星数〔个〕
≥5
≥4
≥4
≥4
≥4
数据采样间隔〔s〕
10~30
10~30
10~30
10~30
10~30
PDOP
≤6
≤6
≤6
≤8
≤10
≥1.4、≥1.2,指采用网观测模式时,每站至少观测一时段,其中二次设站点数不应小于GNSS网总点数的60%或40%、20%。
表4.2.4-2五等RTK平面控制点测量主要技术要求
等级
相邻点间平均边长〔m〕
点位中误差〔cm〕
边长相对中误差
与基准站的距离〔km〕
观测次数
起算点等级
五〔一〕
1000
≤5
1/20000
≤5
≥4
四等与以上
五〔二〕
500
≤5
1/10000
≤5
≥3
五等与以上
注1:
点位中误差指控制点相对于最近基准的误差。
注2:
采用单基准站时,应至少更换一次基准站进展观测。
注3:
采用网络RTK控制测量可不受流动站到基准站距离的限制,但应在网络有效服务X围内。
表4.2.4-3图根RTK控制点测量主要技术要求
与基准站的距离〔km〕
观测次数
起算点等级
≤5
≥2
五等与以上
注:
网络RTK控制测量可不受流动站到基准站距离的限制,但应在网络有效服务X围内。
1基线解算时,数据点最低高度角宜为20°。
2用于极限解算的起算点的单点定位观测时间不宜少于30min。
3处理过程应顾与天线相位中心相对于测站标志偏差的水平和垂直分量。
4求解中被删除的相位同步观测值数不应大于10%。
5重复基线测量的差值,应满足式〔4.2.6-1〕的规定:
ds≤2
σ〔4.2.6-1〕
σ=
〔4.2.6-2〕
式中ds——重复基线测量的差值,mm;
σ——相应基线长度中误差,mm;
a——相应等级控制网的固定误差,mm;
b——相应等级控制网的比例误差系数,mm/km;
D——平均边长,km。
6异步环各坐标分量闭合差与环线全长闭合差应满足式〔4.2.6-3〕的规定:
〔4.2.6-3〕
式中:
n——闭合环中的边数
W——环线全长闭合差,mm。
7同步环坐标分量闭合差的限差值为异步环闭合差限差值的1/2.
4.2.7观测数据不足或环闭合差不满足4.2.6条的规定,硬冲厕有关基线或同步图形。
4.2.8GNSS网的无约束平差,应符合如下规定:
1应在WGS-84坐标系中三维无约束平差,并提供各观测点在WGS-84坐标系中的三维坐标、各基线向量三个坐标差观测值的改正数、基线长度、基线方位与相关的精度信息。
2无约束平差的基线向量改正数的绝对值,不应超过相应等级的基线长度允许中误差的3倍。
4.2.9GNSS网的约束平差,应符合如下规定:
1硬杂国家坐标系或地方坐标系中进展二维或三维约束平差。
2对于坐标、距离或方位,可强制约束,也可加权平差。
3平差结果,应输出观测点在相应坐标系中的二维或三维坐标、基线向量的改正数、基线长度、基线方位角等,以与相关的精度信息。
需要时,还应输出坐标转换参数与其精度信息。
4控制网约束平差的最弱边相对中误差,应满足表4.2.1中相应等级的规定。
4.2.10采用RTK方法进展平面控制测量时,应满足如下要求:
1坐标转换参数可直接应用测区GNSS网约束平差的计算结果,也可在测区的周边和中部均匀选择4个以上重合点求定转换参数;当测区面积较大需要分区求解坐标转换参数时,相邻分区公共重合点不应少于2点。
2基准站应符合如下规定:
1〕采用网络RTK时,基准站网点的设立应符合CH/T2008的要求。
2〕自设基准站如需长期和经常使用,宜埋设有强制对中装置的观测墩。
3〕自设基准站应设置在高一级控制点上。
4〕用电台进展数据传输时,基准站宜选择在测区相对较高的位置;用移动通信进展数据传输时,基准站应选择在测区有移动通信接收信号的位置。
5〕选择无线电台通信方法时,应按约定的工作频率进展数据链设置。
6〕应设置与随机软件对应的仪器类型、电台类型、电台频率、天线类型、数据端口、蓝牙端口等。
7〕应设置基准站坐标、数据单位、尺度因子、投影参数和接收机天线高等参数。
3流动站应符合如下规定:
1〕网络RTK的流动站应获得系统服务的授权,并在有效服务区域内,保持与服务控制中心的数据通信畅通。
2〕用数据采集器设置流动站的坐标系统转换参数,设置与基准站的通信。
3〕RTK流动站不宜在隐蔽地带、成片水域或强光电干扰源附近观测。
4〕观测考试前应对仪器进展初始化,并得到固定解,当长时间不能获得固定解时,宜断开通信链路,再次进展初始化操作。
5〕各次观测之间流动站应重新初始化。
6〕五等与图根控制RTK流动站观测时应采用三脚架对中、整平,每次观测历元数不应小于20个,采样间隔2~5s;各次测量的平面坐标允许较差;五等为4cm,图根为图上0.1mm。
7〕作业过程中,如出现卫星信号失锁,应重新初始化,并经重合点测量检测合格后,方能继续作业。
8〕每次作业开始前或重新架设基准站后,均应进展至少一个同等级或高等级点的检核,其平面坐标允许较差为7cm。
9〕五等RTK测量平面坐标转换允许残差为2cm;图根RTK测量平面坐标转换允许残差为图上0.07mm。
10〕数据采集器设置控制点的单次观测的平面允许收敛精度为2cm。
11〕进展后处理动态测量时,流动站应先在静止状态下观测10~15min获得固定解,然后在不丢失初始化状态的前提下进展动态测量。
4RTK测量外业采集的数据应与时进展备份和内外业检查。
4.3三角形网测量
4.3.1三角形网测量按精度可划分为四个等级,各等级的主要技术要求应满足表4.3.1的规定。
表4.3.1三角形网测量的主要技术要求
等级
测角中误差〔″〕
三角形最大闭合差〔″〕
平均边长〔km〕
水平角观测测回数
测距相对中误差
最弱边边长相对中误差
DJ1
DJ2
DJ6
二等
±
8~13
9
—
—
1/300000
1/150000
三等
±
7
4~8
6
9
—
1/160000
1/80000
四等
±
9
2~4
4
6
—
1/120000
1/40000
五等
±
15
1~2
1
3
6
1/60000
1/20000
±
30
0.5~1
—
2
4
1/30000
1/10000
4.3.2三角形网的选点应符合如下要求:
1相邻点应通视良好,其视线距障碍物的距离,二等不宜小于2m,三等、四等不宜小于1.2m,四等一下宜保证便于观测、以不受旁折光的影响为原如此。
2测距边宜选在地面覆盖物一样的地段,不宜选在烟囱、散热塔、散热池等发热物体的上空。
测线上不应有树枝、电线等障碍物。
测线应离开障碍物1.3m以上并避开高压线等强电磁场的干扰,避开视线后方反射物体。
3测距边的测线倾角不宜过大。
采用对向三角高程测定高差时,高差应小于按式〔4.3.2〕计算的限值。
〔4.3.2〕〔×103〕
式中:
h——测距边两端点间的高差,m;
D——实测边长,m;
T——测距边要求的相对中误差分母值。
4.3.3三角网外业观测应符合如下规定:
1宜采用全站仪进展三角形网的水平方向、距离、天顶距观测。
2距离测量时使用的棱镜应与全站仪相配套,且与仪器检定时保持一致。
3观测开始前,仪器温度应与外界环境相一致;观测过程中,气泡中心位置不应偏离补偿器补偿X围,当气泡位置接近偏离限值时,在观测测回间应重新整平仪器。
4.3.4三角形网水平角观测应符合如下规定:
1水平方向观测宜采用方向观测法,一测回操作程序、分组观测按GB/T17942的有关规定执行。
2方向观测法的技术要求应符合表4.3.4的要求。
表4.3.4水平角方向观测法的技术要求单位:
〔″〕
等级
仪器类型
两次读数差
半测回归零差
同一测回中2C互差
同一方向值各测回较差
四等与以上
DJ1
1
6
9
6
DJ2
3
9
13
9
五等与以下
DJ2
3
12
18
12
DJ6
—
24
—
24
注:
当观测方向的垂直角超过±3°X围时,该方向2C互差可按同方向相邻测绘进展比拟。
3在如下情况下进展水平角观测的补测或重测:
1〕当半测回归零差超限或起始方向2C互差超限时,该测回应重测。
2〕2C互差或同一方向值个测绘较差超限时,可只重测超限方向。
3〕一测回中重测方向数超过总方向数的1/3时,该测回应全部重测。
重测测回数超过全部测回总数的1/3时,该点应全部重测。
4.3.5测距仪的分类和精度等级划分应按如下规定执行:
1按测距仪出厂标称精度,分为四级,见表4.3.5。
精度等级
每千米测距标称精度绝对值〔mm
Ⅰ
|mD|≤2
Ⅱ
2<|mD|≤5
Ⅲ
5<|mD|≤10
Ⅳ〔等外级〕
|mD|>10
2测距仪器的标称精度,按式〔4.3.5〕表示。
|mD|=±〔a+bD〕〔4.3.5〕
式中:
a——表层精读固定误差,mm;
b——表层精读比例误差系数,mm/km;
D——测量距离,km,以1km计。
4.3.6三角形网距离测量应符合如下规定:
1测站对中允许误差和镜站对中允许误差为2mm。
2测距作业前,应正确安置仪器,量取仪器高和棱镜高至毫米。
四等与以上等级的三角形网边长测量时,应在测距前后各量取仪器高和棱镜高一次,取平均值。
3测距宜选择最优时间段观测,晴天作业时应给仪器和气象仪表打伞遮阳。
4气象数据的观测应满足表4.3.6的规定。
4.3.7三角形网距离测量的主要技术要求应满足表4.3.7的规定。
4.3.8测距成果的重测和取舍应符合如下规定:
1凡超出表4.3.7限差的观测成果,均应进展重测。
表4.3.6气象数据的观测要求
等级
最小读数
测定的时间间隔
气象数据的取用
温度〔℃〕
气压〔Pa〕
四等与以上
50
每边观测始末各测定一次
每边两端的平均值
五等与以下
100
每边测定一次
测站媏的数据
2当一测回中读数较差超限时,可重测1个读数。
重测超限时,整测回应重新观测。
3测绘间较差超限时,可重测2个测回,
4往、返测或不同时间段较差超限时,应分析原因,重测单方向的距离,假如重测超限,应重测往、返两个方向的距离。
等级
测距仪等级
每边测回数
一测回读数较差限值〔mm〕
测绘间较差限值〔mm〕
往返测较差限值
二等
Ⅰ
往、返各4测回
2
3
2〔a+bD〕
Ⅱ
往、返各4测回
5
7
三等
Ⅱ
往、返各4测回
5
7
Ⅲ
往、返各4测回
10
15
四等
Ⅱ
往、返各3测回
5
7
Ⅲ
往、返各4测回
10
15
五等
Ⅲ
单向3测回
10
15
—
Ⅳ
单向4测回
20
30
图根
Ⅳ
单向2测回
20
30
注1:
一测回是指仪器照准目标依次,读数4次。
注2:
往返测也可用不同时间段观测代替。
注3:
往返测较差应将斜距化算到同一水平面上,方可进展比拟。
4.3.9测距边的倾斜改正值,可采用水准高差或光电测距三角高程测量计算。
当采用光电测距三角高程测量确定高差时,应进展对向观测。
其往返高差之差
应满足式〔4.3.9〕的要求。
≤×10-3〔4.3.9〕
式中:
——往返测观测的高差之差,m;
S——实测边长,m。
4.3.10对向观测天顶距测量的观测技术要求按5.4节的相关规定执行。
对向观测天顶距测量中误差应满足式〔4.3.10〕的要求。
式〔4.3.10〕
式中:
——天顶距测量中误差,〔″〕;
T——测距边要求的相对中误差分母;
Z——天顶距,〔°〕;
——取值为206265,〔″〕。
4.3.11测距边的修正与归算应符合如下规定:
1测距边经过气象、加常数、乘常数修正后的斜距,才能化算为水平距离。
假如需对斜距加精测频率修正值,如此应在计算加常数和乘常数之前进展此项改正。
2测距边的气象修正按全站仪或测距仪说明书给出的公式计算。
3测距边的加、乘常数修正值按式〔4.3.11-1〕计算。
△Dk=RS+C〔4.3.11-1〕
式中:
△Dk——加、乘常数修正值,mm;
R——由测距仪检定求得的乘常数值,mm/km;
C——由测距仪检定求得的加常数值,mm;
S——斜距观测值,km。
4测距边改算为水平距离的计算应按如下要求执行:
1〕采用三角高程测量时,天顶距按式〔4.3.11-2〕计算。
式中:
D——测距边水平距离,m;
S——经气象、加常数、乘常数等修正后的斜距,m;
Z——天顶距观测值,〔°〕;
f——地球曲率和大气折光对天顶距的修正值,〔″〕;
K——当地大气折光系数;
R——测区地球曲率半径,m。
2〕采用高差时,按式〔4.3.11-4〕计算。
式中h——测距边两端点之间的高差,m。
5测距边水平距离归算到测区平均高程面或规定的某一高程面上的长度按式〔4.3.11-5〕计算。
式中
——归算到测区平均高程面或规定的某一高程面上的长度,m。
——测区的平均高程或规定的某一高程,m;
——测距边两短点的平均高程,m;
——测距边所在法截线的曲率半径,m。
6测距边水平距离归算到参考椭球面上的长度按式〔4.3.11-6〕计算。
式中
——归算到参考椭球面上的长度,m;
——测区大地水准面高出参考椭球面的高差,m。
7参考椭球面上的长度投影到高斯平面上的长度按式〔4.3.11-7〕计算。
式中
——高斯平面上的边长,m;
——测距边两端点横坐标平均值,m;
——测距边两端点横坐标之差,m;
——参考椭球面上测距边中点的平均曲率半径,m。
4.3.12三角形网的测角中误差应按式〔4.3.12〕计算。
〔4.3.12〕
式中:
W——三角形闭合差,〔″〕;
n——三角形的个数。
4.3.13三角形网平差时,观测角或观测方向、观测边均应视为观测值参与平差,平差计算应采用严密平差法。
平差后的精读评定,应包括测角中误差、边长相对中误差、点位中误差或点位误差椭圆参数。
4.4导线测量
4.4.1导线测量的主要技术要求应符合如下规定:
1三等、四等、五等导线测量的主要技术要求,应满足表4.4.1-1的规定。
2图根导线测量的主要技术要求,应满足4.4.1-2的规定。
3导线网中,高级点与节点、节点与节点之间的导线长度,不应大于表4.4.1-1和表4.4.1-2中相应等级规定长度的0.7倍;高级点间的长度不应大于表4.4.1-1和表4.4.1-2规定的导线长度的1.5倍。
4.4.2倒显得布设应符合如下要求:
1各级导线宜布设成直伸形状。
2导线控制用作加密网时可采用单一符合导线,附合导线布设宜为等边直伸。
3图根单定向角光电测距导线的长度应为同等级符合导线长度的0.8倍;图根无定向角光电测距导线的长度应为同等级符合导线长度的0.6倍。
4图根无定向角光电测距导线宜组成导线网;当为单一无定向角导线时应有点检查;当一直点位高级点时,点位较差或横向位移不应大于图上0.3mm。
4.4.3导线网的选点可按4.3.2条执行。
4.4.4导线测量外业观测时,除应符合4.3.3条的规定外,还应符合如下规定:
1仪器光学对中器应随时检验和校正。
导线的水平角在短边观测时,仪器和照准标志应对中,三等、四等导线宜采用三联脚架法或强制对中底盘。
2如受外界因素影响,补偿器无法正常工作或超出补偿X围,应停止观测。
4.4.5导线测量水平角观测的技术要求应按4.3.4条执行。
4.4.6三等、四等导线点当只有两个方向时,应以奇数测回和偶数测回分别观测导线前进方向的左角和右角,左、右角分别取中数后,按式〔4.4.6〕计算闭合差,其差值不应大于表4.4.1-1中相应等级测角中误差的2倍。
△=[左角]中+[右角]中-360°〔4.4.6〕
4.4.7图根导线水平角观测,采用DJ2型仪器时可观测一个“半测回〞;采用DJ6型仪器观测时可两个“半测回〞,“半测回〞差不应大于24″。
4.4.8导线距离测量技术要求应按4.3.6-4.3.9条执行。
4.4.9导线天顶距测量技术要求应按4.3.10条进展。
4.4.10导线测量测距边的修正与归算,应符合4.3.11条的规定。
4.4.11导线测角中误差的计算可按左右角闭合差和导线方位角闭合差两种方式进展。
1利用左右角闭合差时,按式〔4.4.11-1〕计算
〔4.4.11-1〕
式中:
——测角中误差,〔″〕;
——测站圆周角闭合差,〔″〕;
——测站圆周角闭合差的个数。
2利用导线方位角闭合差时,按式〔4.4.11-2〕计算。
〔4.4.11-2〕
式中:
——附合导线〔或比和导线〕的方位角闭合差,〔″〕;
——计算
时的测站数;
——附合导线或闭合导线的个数。
4.4.12导线距离测量的精读评定应符合如下要求:
1一次测量距离的中误差按式〔4.4.12-1〕计算。
〔4.4.12-1〕
式中:
d——化算至同一高程面的各边往、返水平距离之差,mm;
——对向观测值的个数。
2对向观测的平均值中误差按式〔4.4.12-2〕计算。
式中:
——对向观测与导线网计算宜采用严密平差法,精读评定应包含单位权中误差、点位误差椭圆参数、相对点位误差椭圆参数等精读信息。
4.5资料整理
4.5.1平面控制测量工作完成后,应对如下资料进展整理:
1技术设计书。
2埋石点点之记。
3控制网展点图。
4原始记录资料。
5平面控制计算资料和控制成果表。
6技术总结报告。
7其他有关的资料。
4.5.2项目完成后,应提交如下资料:
1技术设计书。
2埋石点点之记。
3控制网展点图。
4控制点成果表。
5技术总结报告。
 升级会员
升级会员 