数控编复习.docx
《数控编复习.docx》由会员分享,可在线阅读,更多相关《数控编复习.docx(17页珍藏版)》请在冰豆网上搜索。
数控编复习
第一章概述
一、 基本概念
1.数控技术(NC技术):
是指用数字化的信息发出指令并实现自动控制的技术。
2.数控系统(NCSystem):
采用了数字控制技术的自动控制系统。
3.计算机数控:
是指用计算机来实现部分或全部的基本数控功能的数控系统。
4.数控机床:
装备了数控系统的机床。
5.加工中心(自动换刀装置)
6.直接数字控制(群控)DNC
7.柔性制造单元FMC
8.柔性制造系统FMS
9.计算机集成制造系统CIMS
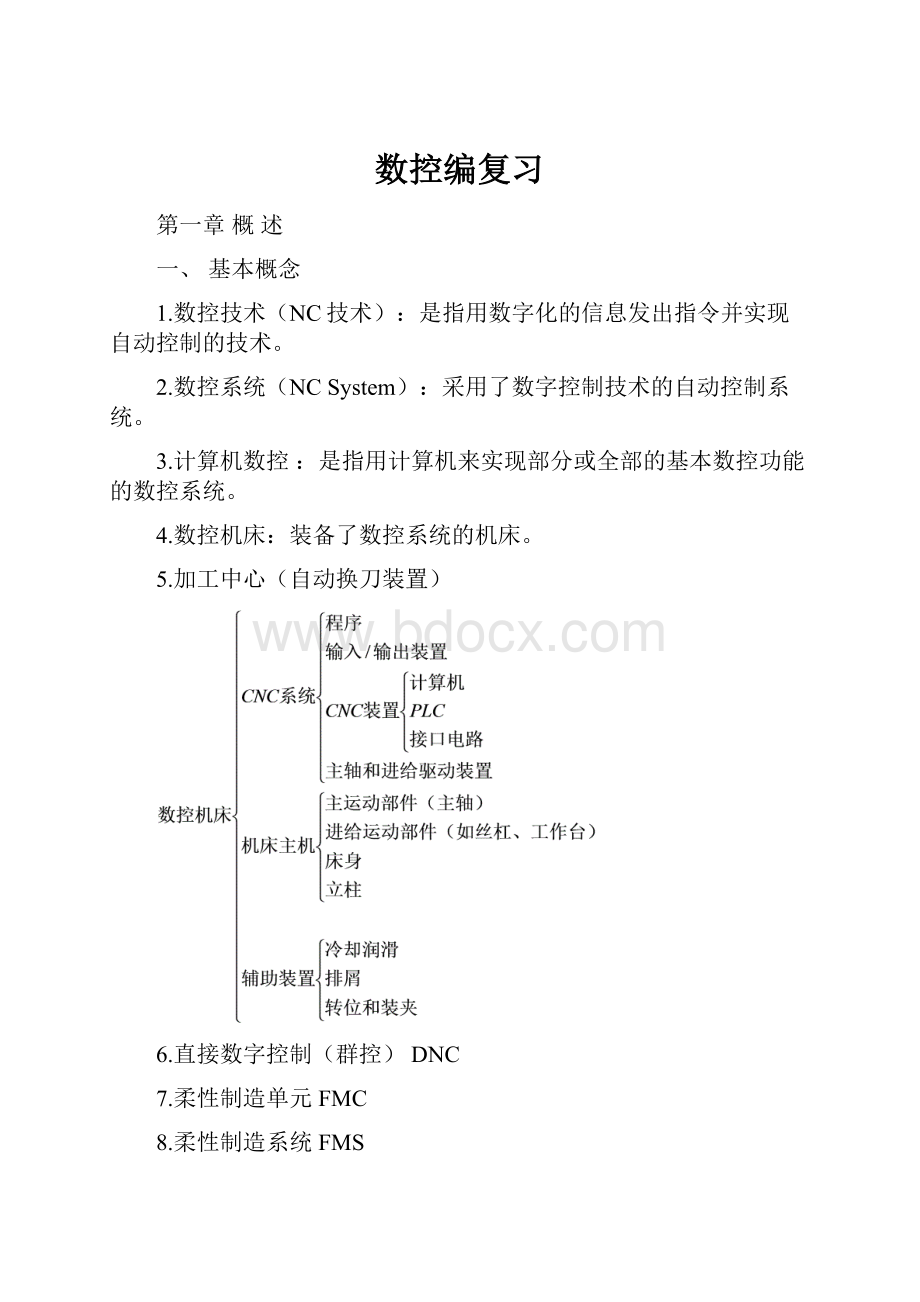
二、数控机床的组成
三.数控机床主机的结构特点
①高刚度和高抗振性;
②小的机床热变形;
③高效率、无间隙、低摩擦传动;
④简化的机械传动结构;
四.数控机床分类
(1)按控制轨迹的特点分类
①点位控制数控机床
②直线控制数控机床
③轮廓控制数控机床
(2)按伺服系统的类型分类
①开环控制数控机床
②闭环控制数控机床
③半闭环控制数控机床
●区别:
位置检测装置及安装位置
●性能比较:
精度、成本、调试和维护
第二章数控加工程序的编制
一.基础知识
数控机床的标准坐标系是如何建立的?
(X、Y、Z)
•Z坐标标准规定:
Z坐标平行主轴轴线的进给轴。
•若没有主轴(牛头刨床)或者有多个主轴,则选择垂直于工件装夹面的方向为Z坐标。
•若有多个主轴,则选择垂直于工件装夹面的方向为Z坐标。
Z坐标正方向的规定:
刀具远离工件的方向。
–Z坐标正方向的规定:
刀具远离工件的方向。
X坐标标准规定:
X坐标是水平的,平行于工件装夹平面。
●在刀具旋转的机床上(铣床、钻床、镗床等)。
ØZ轴水平(卧式),则从刀具(主轴)向工件看时,X坐标的正方向指向右边。
Z轴垂直(立式);单立柱机床,从刀具向立柱看时,X的正方向指向右边;
双立柱机床(龙门机床),从刀具向左立柱看时,X轴的正方向指向右边。
X坐标
●机床上(车床、磨床等)主轴带工件旋转机床,X轴的运动方向是工件的径向并平行于横向拖板,且刀具离开工件旋转中心的方向是X轴的正方向。
Y坐标
●利用已确定的X、Z坐标的正方向,用右手定则或右手螺旋法则,确定Y坐标的正方向。
Ø右手定则:
大姆指指向+X,中指指向+Z,则+Y方向为食指指向。
Ø右手螺旋法则:
在XZ平面,从Z至X,姆指所指的方向为+y。
二.常用的基本指令(P42)
准备功能指令
1、快速定位指令G00
2、工件坐标系设定G92
3、直线进给指令G01
4、圆弧插补指令G02G03
5、刀具半径补偿指令G40G41G42
6、刀具长度补偿指令G43G44
7、零点偏移设置指令G54~G57G43G53
8、绝对和相对编程指令G90G91
9、坐标平面选择指令G17、G18、G19
辅助功能指令
Ø程序停止指令M00
Ø计划停止指令M01
Ø主轴控制指令M03、M04、M05
Ø换刀指令M06
Ø冷却液控制指令M07、M08、M09
Ø夹紧、松开指令M10、M11
Ø主轴及冷却液控制指令M13、M14
Ø程序结束指令M02M30
第三章CNC装置及其接口电路
一.CNC装置应该具备以下功能:
(1)主轴功能
(2)进给功能
(3)准备功能即G功能。
(4)插补功能
(5)控制功能(6)辅助功能
(7)选刀及工作台分度功能
(8)补偿功能(9)固定循环功能
(10)字符、图形显示功能(11)诊断功能
(12)通讯功能(13)在线自动编程功能
二.硬件结构
1.单微处理器结构和多微处理器结构
2.单微处理器结构的CNC装置
●单微处理器结构的CNC装置并非只有一个微处理器;
●多采用“集中控制,分时处理”的方式来完成各项数控功能;
●按印刷电路板的插接方式的不同,可分为:
(1)大板结构
(2)模块化结构
3.多微处理器结构CNC装置
●多微处理器结构CNC装置的六种基本功能模块:
(1)CNC管理模块
(2)CNC插补模块
(3)位置控制模块
(4)存储器模块
(5)PLC模块
(6)指令、数据的输入/输出及显示模块;
●多微处理器结构CNC装置的典型结构
(1)共享总线结构
(2)共享存储器结构
三.CNC装置常用的软件设计技术
1.前后台型的软件结构和中段式软件结构
2.前后台型的软件结构
CNC装置软件由前台程序和后台程序组成,前台程序为实时中断程序,承担了几乎全部的实时功能,这些功能与机床动作直接相关,如位置控制、插补、辅助功能处理、监控、面板扫描及输出;后台程序主要完成准备工作和管理工作,如输入、译码、插补准备及管理等,通常称为背景程序。
3.中段式软件结构
中段式软件结构没有前后台之分,除了初始化程序外,把控制程序安排成不同级别的中断服务程序,整个软件是一个大的多重中断系统。
系统的管理功能主要通过各级中断服务程序之间的通信来实现。
四.PLC
1.可编程序控制器简称PLC。
2.PLC采用循环(巡回)扫描工作方式工作。
3.数控机床中,PLC有内装型和独立型之分。
4.机床PLC的工作方式
数控机床用PLC的循环扫描程序分为高级顺序程序和低级顺序程序两个部分。
数控机床用PLC对高级和低级顺序程序的信号进行不同的处理。
高级顺序程序对来自NC或机床的信号立即执行。
而低级顺序程序对来自NC或机床的信号从程序开始进行同步处理,直到程序结束才处理完。
五、机床I/O接口
1.功能:
用来接收机床操作面板上的开关、按钮信号及机床的各种限位开关信号;还用来把机床工作状态指示灯信号送到机床操作面板,把控制机床动作的信号送到强电柜。
2.要求:
1)进行必要电隔离,防止干扰信号串入,防止高压串入对CNC装置的损坏;
2)进行电平转换和功率放大。
3.机床I/O接口中常用的器件及电路有:
•1)光电耦合器
•2)簧式继电器
•3)固态继电器
•4)接口驱动电路
4.标准输入输出设备接口
1)光电阅读机接口
2)键盘及其接口
3)显示器及接口
第四章插补、刀具补偿与速度控制
一.插补
1.所谓插补就是指数据密化的过程。
在对数控系统输入有限坐标点(例如起点、终点)的情况下,计算机根据线段的特征(直线、圆弧、椭圆等),运用一定的算法,自动地在有限坐标点之间生成一系列的坐标数据,即所谓数据密化,从而自动地对各坐标轴进行脉冲分配,完成整个轮廓曲线的轨迹运行,以满足加工精度的要求。
2.脉冲增量插补就是通过向各坐标分配脉冲,来控制机床坐标轴作相互协调的运动,从而实现刀具和工件之间的相对运动。
3.数据采样插补法就是使用一系列首尾相连的微小直线段来逼近给定曲线,由于这些微小线段是根据程编进给速度,按系统给定的时间间隔来进行分割,所以又称为“时间分割法”。
4.逐点比较法的基本原理是,在刀具按要求轨迹运动加工零件轮廓的过程中,不比较刀具与被加工零件轮廓之间的相对位置,并根据比较结果决定下一步的进给方向。
•在逐点比较法中,每进给一步都须要进行偏差判别、坐标进给、新偏差计算和终点比较四个节拍处理。
二、刀具补偿
1.通过刀具补偿将加工零件的轮廓轨迹转换为刀具中心轨迹。
2.刀具补偿一般分成刀具长度补偿和刀具半径补偿(概念)。
3.在零件轮廓加工过程中,刀具半径补偿的执行过程分为三个阶段:
•
(1)刀具半径补偿的建立。
•
(2)刀具半径补偿的执行。
•(3)刀具半径补偿的注销。
4.B、C刀具半径补偿功能的区别是什么?
5、根据两段程序轨迹的矢量夹角和刀具补偿方向(G41或G42)的不同,又可以有以下几种转接过渡方式:
伸长型;缩短型;插入型。
而插入型又分两种过渡方式,即直线过渡型和圆弧过渡型。
三、闭环CNC装置的进给速度及加减速控制
•在闭环CNC装置中,加减速控制多数都采用软件来实现,可放在插补前,也可放在插补后进行,如下图所示。
•放在插补前的加减速控制称为前加减速控制;
•放在插补后的加减速控制称为后加减速控制;
•第五章伺服驱动系统
•一、数控机床伺服系统
•1.伺服驱动系统简称伺服系统(Servosystem),是一种以机械位置或角度作为控制对象的自动控制系统。
•2.伺服驱动系统通常由伺服驱动装置、伺服电机、机械传动机构及执行部件组成。
•2.数控机床伺服系统的分类
•
(1)按伺服系统调节理论,数控机床伺服系统可分为开环、闭环和半闭环系统。
•
(2)按驱动部件的动作原理,数控机床伺服系统又可分为电液控制系统和电气控制系统。
•(3)按反馈比较控制方式,数控机床伺服系统有脉冲比较伺服系统、相位比较伺服系统、幅值比较伺服系统和全数字伺服系统。
•(4)按控制对象和使用目的的不同,数控机床伺服系统可分为进给伺服系统、主轴伺服系统和辅助伺服系统。
•3、数控机床对伺服系统的基本要求
•
(1)位移精度高
•
(2)可靠性高
•(3)快速响应,无超调
•(4)调速范围宽
•(5)低速大扭矩
•二、位置检测装置
•1、检测装置在CNC系统中的作用
•位置检测装置是数控系统的重要组成部分,在闭环数控系统中,必须利用位置检测装置把机床运动部件的实际位移量随时检测出来,与给定的控制值进行比较,用它们的差值控制驱动元件正确运转,使工作台或刀具按规定的轨迹移动。
•数控机床的位移精度,主要取决于数控机床驱动元件和位置检测装置的精度,但位置检测装置精度将起主要作用或决定性作用。
•2.检测装置的精度指标主要包括系统精度和系统分辨率。
•系统精度是指在一定长度或转角内测量积累误差的最大值。
•系统分辨率是测量元件所能正确检测的最小位移量。
•3.数控机床对位置测量装置的要求:
•
(1)工作可靠,抗干扰能力强;
•
(2)满足精度、分辨率、测量范围的要求;
•(3)对高速动态信号能实现不失真测量和处理;
•(4)使用维护方便;
•(5)易于实现自动化;
•(6)成本低。
•4.编码器是一种旋转式的检测角位移的传感器,并将角位移用数字(脉冲)形式表示,故又为脉冲编码器。
它是数控机床上使用最为广泛的位置检测装置,也可以用于速度检测。
•脉冲编码器按码盘的读取方式可分为光电式、接触式和电磁式。
•数控机床上使用光电式脉冲编码器。
•按测量的坐标系,脉冲编码器可分为增量式和绝对式。
•5.增量式光电脉冲编码器
•A、B两相的作用:
•①根据脉冲的数目可得出被测轴的角位移
•②根据脉冲的频率可得被测轴的转速;
•③根据A、B两相的相位超前滞后关系可判断被测轴旋转方向。
•④后续电路可利用A、B两相的90°相位差进行细分处理(四倍频电路实现)。
•Z相的作用:
•①被测轴的周向定位基准信号;
•②被测轴的旋转圈数记数信号。
•6.光栅作为高精度位置检测装置,用在数控机床进给伺服驱动系统中,主要用来检测位移。
•它主要由标尺光栅和光栅读数头两大部分组成。
•根据光栅尺制造方法和光学原理的不同,光栅可分为透射光栅和反射光栅。
•7.光栅莫尔条纹有如下特点:
•
(1)放大作用;B=ω/θ
•
(2)误差均化作用;
•(3)利用莫尔条纹测量位移
•
8、感应同步器
•感应同步器是一种电磁式位置检测元件,按其结构特点一般分为直线式和旋转式两种。
直线式感应同步器由定尺和滑尺组成;旋转式感应同步器由转子和定子组成。
前者用于直线位移测量,后者用于角位移测量。
•感应同步器广泛应用于数控机床及各类机床数控改造。
•鉴相型工作方式和鉴幅工作方式。
9.步进电机工作方式
•步进电机是一种将电脉冲信号转换成相应的角位移或线位移的控制电机。
对步进电机送一个控制脉冲,其转轴就转过一个角度称为一步。
由于步进电机采用这种步进形式的运动方式,故称为步进电机。
•脉冲数量决定着步进电机的角位移(或线位移),脉冲频率决定着步进电机的旋转速度。
•分配脉冲的相序改变后,步进电机则反转。
10.步进电机的步距角
步距角和步进电机的相数、通电方式及电机转子齿数的关系如下:
式中:
α—步进电机的步距角;
m—电机相数;Z—转子齿数;
K—系数,相邻两次通电相数相同,K=1;
相邻两次通电相数不同,K=2。
11.步进电动机步距角选择
[举例]在图示开环伺服系统中,传动比i=Z2/Z1=2.5,步进电机与丝杠之间有一级变速,丝杠导程为p=6mm,该系统的脉冲当量δ=0.01mm,求步进电机的步距角?
12.步进电机驱动电源
12.1驱动电源通常由环形分配器和功率驱动器组成
12.2环形分配器
•环形分配器的主要功能是将数控装置的插补脉冲,按步进电机所要求的规律分配给步进电机驱动电源的各相输入端,以控制励磁绕组的导通或关断。
同时由于电机有正反转要求,所以环形分配器的输出是周期性的,又是可逆的。
12.3环形分配器
•CH250三相步进电机环配芯片。
•软环形分配器
12.4功率驱动器
(1)单电不驱动电路
(2)高低压驱动电路
(3)斩波驱动电路
(4)调频调压电路
(5)细分驱动电路
•
•例题1.逐点比较法插补第一象限逆时针走向的圆弧AE起点A(8,6),终点E(0,10)。
•
•
•例题2.DDA插补第一象限直线OA,起点坐标为原点O(0,0),终点坐标为A(5,7)。
•
 升级会员
升级会员 