mc33035控制器的实验报告.docx
《mc33035控制器的实验报告.docx》由会员分享,可在线阅读,更多相关《mc33035控制器的实验报告.docx(11页珍藏版)》请在冰豆网上搜索。
mc33035控制器的实验报告
第一章无刷直流永磁电机的原理、特性
1.1无刷直流永磁电机的工作原理
在无刷直流永磁电动机(BLDCM)中,电枢绕组被设置在定子上,永磁体磁极设置在转子上,永磁体被设置在转子上。
定子各相电枢绕组相对转子永磁体磁场的位置,由转子位置传感器通过电子方式或电磁方式所感知;并利用其输出信号,通过电子换向电路,按照一定的逻辑程序去驱动与电枢绕组相连接的相应的功率开关管,把电流开关或换向到相应的电枢绕组。
随着转子的转动,转子的位置传感器不断地发出信号,致使电枢绕组不断地依次通电,不断地改变通电状态,从而使得在某一磁极下的线圈导体中流过的电流方向始终不变,这就是无刷直流永磁电机的无接触式电子换向过程的实质。
无刷直流永磁电机是在有刷直流电动机的基础上发展起来的。
无刷直流永磁电机和有刷直流电动机基本上具有相同的运行机理,但是在运行性能方面存在一定的差异:
有刷直流电动机电枢绕组的元件数和换向器的换向片数多于无刷直流电动机电枢绕组的相数;在运行过程中,有刷直流电动机的磁极磁场与电枢磁场始终处于正交状态,而无刷直流电动机的磁极磁场与电枢磁场在某一角度位置范围内变动,正交状态只是其中一个瞬时位置。
因此,在其他条件相同的情况下,在运行过程中,无刷直流电动机的力矩脉动要大于有刷直流电动机的力矩脉动;无刷直流电动机的电磁力矩要小于有刷直流电动机的电磁力矩。
1.2电子换向
在无刷直流永磁电动机中,来自转子位置传感器的信号,经处理后按照一定的逻辑程序,驱使某些与电枢绕组相连接的功率开关晶体管在某一瞬间到通或截止,迫使某些原来没有电流的电枢绕组开始流通电流,某些原来有电流的电枢绕组内开始关断电流或改变电流的流通方向,从而迫使电子磁状态的产生变化。
我们把这种利用电子电路来实现电枢绕组内电流变化的物理过程称为电子换向。
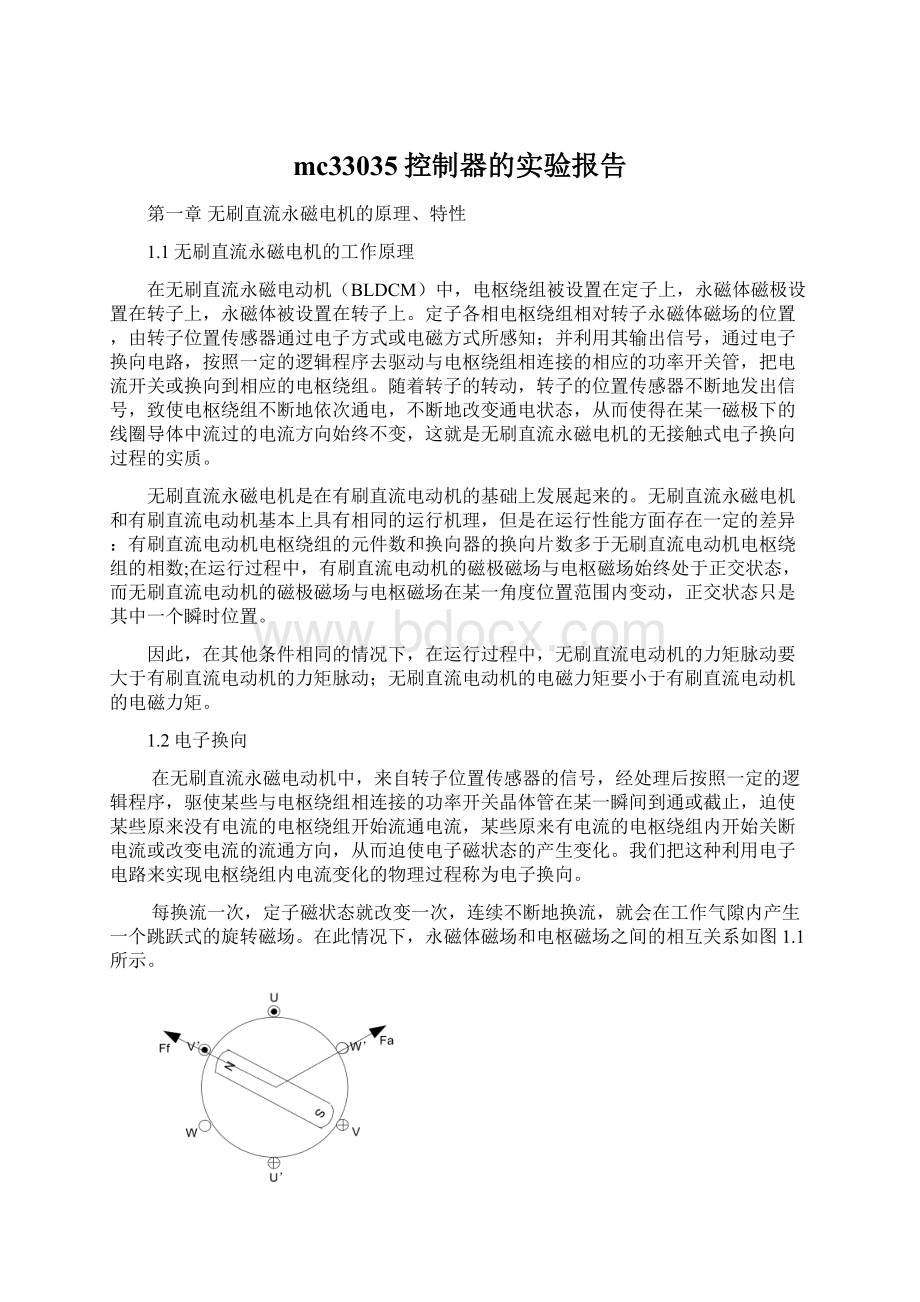
每换流一次,定子磁状态就改变一次,连续不断地换流,就会在工作气隙内产生一个跳跃式的旋转磁场。
在此情况下,永磁体磁场和电枢磁场之间的相互关系如图1.1所示。
(a)(b)
(c)(d)
图1.1永磁体磁场和电枢磁场之间的相互关系
图1.1(a)为第一磁状态,Fa为电枢绕组被反馈电后所产生的磁势。
显然,电枢磁场与永磁体磁场的相互作用迫使电动机转子沿着顺时针方向旋转;当转子转过1200电角度后,便进入第二磁状态,如图1.1(b)所示,电动机转子继续沿着顺时针方向旋转;当转子再转过1200电角度后,便进入第三磁状态,如图1.1(c)所示,电动机转子继续沿着顺时针方向旋转;当转子再沿着顺时针方向转过1200电角度后,电动机便回复到起始状态。
这样周而复始,电动机便连续不断地旋转。
这里,我们把一个功率开关晶体管保持持续导通的电角度称为该功率开关晶体管的导通角
;把一个磁状态所持续的电角度称之为状态角
。
为了成功实现无刷直流电动机电枢绕组换向或换流,转子位置传感器旋转部分的扇形片的张角
必须满足由下式决定条件
(1-1)
式中,p为磁极对数;m为绕组相数。
为了避免启动时出现死点,保证无刷直流电动机的可靠运行,扇形片的张角
应稍大于
的数值。
1.3转子位置传感器(霍尔磁敏传感器)
转子位置传感器在无刷直流永磁电动机中,主要起两个作用,一是通过它检测出转子永磁磁极相对电枢绕组所处的位置,以便确定换向驱动电路中功率晶体管的导通顺序;二是确定电子换相电路驱动电路中功率晶体管的导通角,从而确定电枢磁场的磁状态。
传感器定子的霍尔器件的数目和配置方法取决于:
电动机本体的相数m、磁极对数p、电枢绕组、逻辑信号处理电路、换向电路、电动机运行时的磁状态角和逆变电路中功率开关器件的导通角等。
归纳起来,传感器定子上的霍尔器件的数目和配置必须满足一下两个条件:
(1)霍尔器件在电动机的一个电周期转内所产生的开关状态时不能重复的,每个开关状态所产生的电角度应相等;
(2)霍尔器件在电动机的一个电周转内所产生的开关状态数目和该电动机的磁状态数目应相对应。
锁存型霍尔器件是一个仅有“0”和“1”两种状态的双值器件。
一个双值器件有两种状态,二个双值器件有四种状态。
根据上述原则,对于最常见的“二相导通星型三相六状态”的电动机而言,一般采用三个霍尔器件,他们在圆周空间的配置有两个方案:
相隔600电角度或相间隔1200电角。
对于一相导通星形三相三状态和二相导通星形三相六状态的电动机而言,其霍尔器件的数目和配置方法如表1.1所列。
导通状态
换向电路
磁状态角
导通角
霍尔元件数
相邻两霍尔器件之间的夹角
电气夹角
机械夹角
一相导通星型三相三状态
非桥式
1200
1200
2或3
600或1200
二相导通星型三相六状态
桥式
600
1200
3
600或1200
表1.1霍尔器件的数目和相邻霍尔器件之间的夹角
第二章控制器电路的设计与实现
2.1控制器芯片MC33035
MC33035集成电路的主要组成部分包括转子位置传感器译码器电路;带温度补偿的内部基准电源;频率可设定的锯齿波振荡器;误差放大器;脉宽调制(PWM)比较器;输出驱动电路;欠电压封锁保护、芯片过热保护等故障输出;限流电路。
MC33035的典型控制功能包括PWM开环速度控制、使能控制(起动或停止)、正反转控制。
MC33035的引脚如图2.1所示,各管脚的功能如表2.1所示。
译码电路将电动机的转子位置传感器信号转换成六路驱动输出信号,三路上侧驱动输出和三路下侧驱动输出。
由于3个输入逻辑信号,可有8种逻辑组合。
其中6种正常状态决定了电动机的6种不同位置状态。
其余2种组合对应于位置传感不正常状态,即3个信号线开路或对地短路状态,此时脚14将输出故障信号(低电平)。
用脚3逻辑电平来确定电动机转向。
当脚3逻辑状态改变时,传感器信号在译码器内将原来的逻辑状态改变成非,再经译码后,得到反相序的换向输出,使电动机反转。
电动机的起停控制由脚7功能端来实现。
当脚7悬空时,内部有电流源使驱动输出电路正常工作。
若脚7接地,3个上侧驱动输出开路(1状态),3个下侧驱动输出强制为低电平(0状态),使电动机失去激励而停车,同时故障信号输出为零。
当加到脚23上的制动信号为高时,电动机进行制动操作。
它使3个上侧驱动输出开路,下侧3个驱动输出为高电平,外接逆变桥下侧3个功率开关导通,使3个绕组端对地短接,实现能耗制动。
图2.1MC33035的引脚图
芯片内设一个四与门电路,其输入端是脚23的制动信号和上侧驱动输出3个信号,它的作用是等待3个上侧驱动输出确实已为高电平状态后,才允许3个下侧驱动输出变为高电平状态,从而避免逆变桥上下开关出现同时导通的危险。
管脚
符号
描述
1,2,24
BT,AT,CT
这三个集电极开路顶端驱动输出设计,用于驱动外部顶端功率开关管
3
正转/反转
用于改变电机的转向
4,5,6
SA,SB,SC
电机位置传感器输入
7
输出使能端
此输入信号为低电平时,电机停转;高电平时,电机运转
8
参考电压输出
此输出为振荡器外接电容提供充电电源,并为误差放大器提供参考电压,并向位置传感器供电
9
电流检测同向输入
此管脚连接于电流检测电阻上端
10
振荡器
振荡频率由外接振荡电阻和电容决定
11
误差放大器同向输入
此输入一般连接到速度设定电位器
12
误差放大器反向输入
在开环控制电路中,此输入通常连接到误差放大器输出
13
误差放大器输出/PWM输入
在闭环应用情况下,此管脚连接补偿
14
错误指示输出
在以下三种情况下,错误指示灯亮:
无效的传感器输入代码;输出使能为逻辑0;电流检测输入大于100mV;欠压锁定动作;热关断
15
电流检测反向输入
此管脚通常连接到电流检测电阻的下端
16
Gnd地
此管脚接地,
17
Vcc
此管脚为控制电路提供电源;通常接10~30V控制器均可正常工作
18
Vc
底部驱动电源;通常接10~30V控制器均可正常工作
19,20,21
CB,BB,AB,
底部功率开关管驱动输出信号
22
60°/120°选择
当电机的位置传感器为60°电气相位时,此管脚接高电平;当电机的位置传感器为120°电气相位时,此管脚接低电平;
23
制动输入
该管脚输入逻辑低电平时,电机旋转;该管脚输入逻辑低电平时
表2.1MC33035管脚功能概述
2.2控制器的主电路
MC33035的中文资料中给出的由MC33035控制器构成的闭环电路,我们对电路进行了部分的修改去掉了由MC33039芯片控制的电流反馈闭环电路,得到开环控制的电路图,如图2.2所示。
图2.2开环无刷电机控制器MC33035
第3章小型无刷直流电机控制器的调试与分析
在调试的时候,我们使用的小型无刷直流电动机的额定功率PN=120W,额定电压为12V,额定转速n=1000r/min。
按照PWM波形产生的原理,需要如图3.1所示的波形。
图3.1误差放大器输出和CT产生的锯齿波
理论上调出了图3.1的波形,电机就可以转动,但是我们的电机没有转。
我们检查了MC33035的每个管脚的电压,发现底部输出19、20、21管脚的输出只有高电平而没有PWM波,顶部输出1、2、24引脚也是高电平。
我们仔细检查了电路的焊接和接线有无错误,重新焊接了可能虚焊的接点。
但是,电机依然没有转。
接着,我们用万用表检查每一个元件的好坏。
这些可能产生错误的因素被我们都排除了。
而另一个现象就是错误指示灯一直亮着。
无效的传感器输入代码;输出使能为逻辑0;电流检测输入大于100mV;欠压锁定动作及热关断,这些情况都会导致错误指示灯亮。
为此,我们一一排除错误的可能。
首先,电流检测输入端已经接地了,那么电流检测输入大于100mV是不可能的;底部驱动一直是高电平,欠压锁定动作及热关断也不会出现。
其次,输出使能也是高电平,那么只有无效的传感器输入代码这一种可能。
我们经过老师的指导,知道了电机的霍尔信号要和电机绕组电势相位的关系要正确,就是每个霍尔信号的导通时间要与电机绕组产生电势的时间要对应。
于是,我们就改变控制器与电机绕组信号输入的相序关系。
电机就可以正常的旋转,通过扭动滑动变阻器的旋钮就可以让电机实现调速。
六个MOSFET有三个P沟道的和三个N沟道的,组成一组,每组的导通和关断是底部驱动输出正常的产生PWM波,即19、20、21管脚的PWM波,如图3.2所示。
顶部的输出如图3.3所示。
图3.2底部驱动输出
从电机转子位置检测器送来的三相位置检测信号送入MC33035,经芯片内部译码电路结合正反转控制端、起停控制端、制动控制端、电流检测端等控制逻辑信号状态,经过运算后,产生逆变器三相上、下桥臂开关器件的6路原始控制信号,其中,三相下桥开关信号还要按直流无刷电机调速机理进行脉宽调制处理。
处理后的三相下桥PWM控制信号经过驱动电路整形、放大后,施加到逆变器的6个MOSFET上,使其产生出供电机正常运行所需的三相方波交流电流。
图3.3顶部驱动输出
为了更直观的观察顶部输出和底部输出的关系,我们同时测量了顶部输出引脚1和底部输出的引脚20、21,如图3.4所示。
当外加14.09V的直流电源给控制器工作使电机正常旋转时,所测得MC33035控制器各管脚电压如表3.1所示。
图3.4顶部输出和底部输出
33035的管脚号
管脚的电压值
1
9.25V
2
9.69V
3
6.26V
4
3.13V
5
3.19V
6
3.15V
7
6.32V
8
6.32V
9
19.9mV
10
2.97V
11
4.04V
12
4.04V
13
4.04V
14
12.83V
15
1.3mV
16
1.6mV
17
14.04V
18
13.06V
19
3.75V
20
4.02V
21
3.81V
22
1.2mV
23
1.2mV
24
9.62V
表3.1MC33035控制器各管脚电压
 升级会员
升级会员 