中科大李厚强图像分析大作业.docx
《中科大李厚强图像分析大作业.docx》由会员分享,可在线阅读,更多相关《中科大李厚强图像分析大作业.docx(16页珍藏版)》请在冰豆网上搜索。
中科大李厚强图像分析大作业
区域提取与分析
——图像分析实验
SAHanxinFeng
1、实验目的
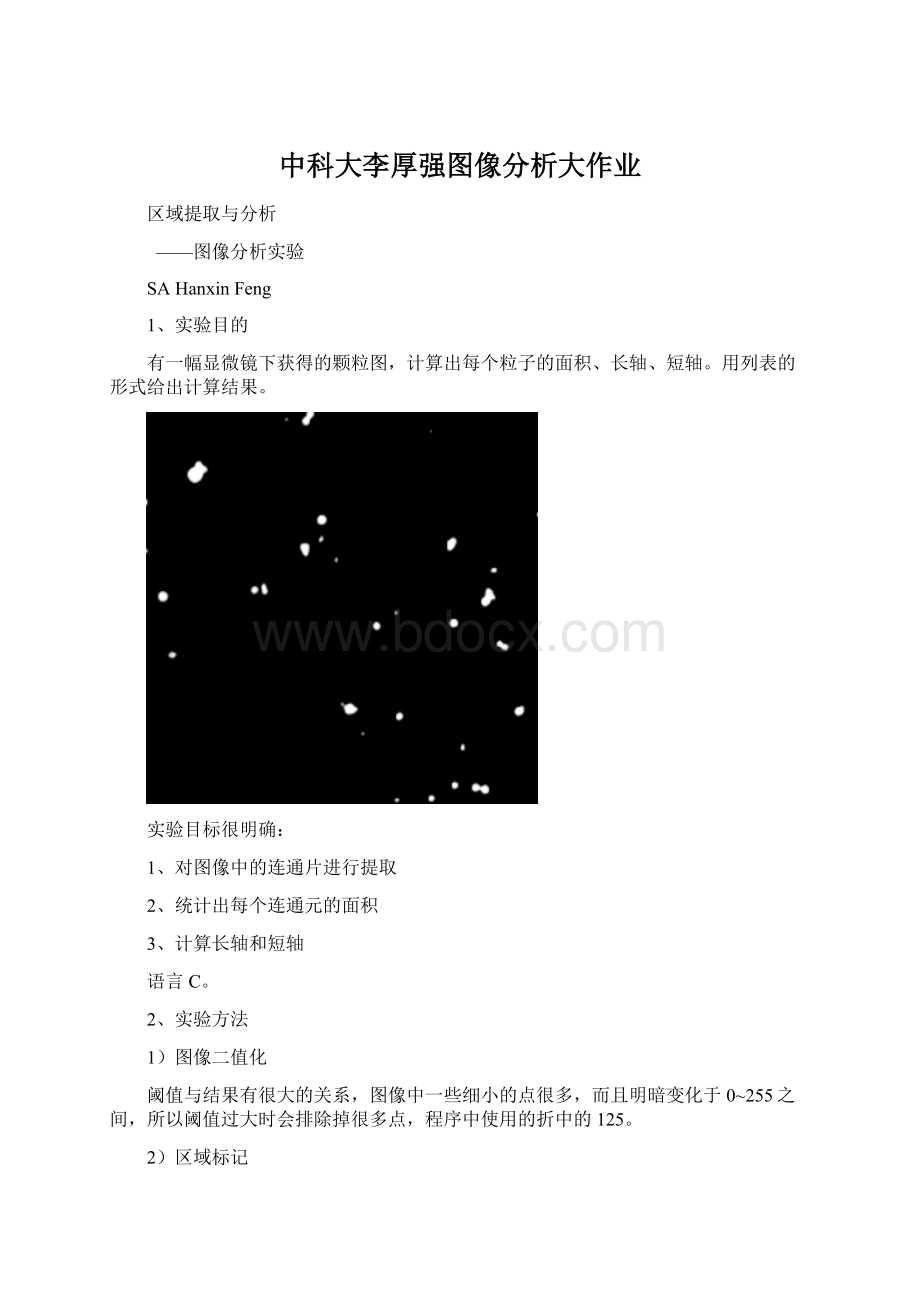
有一幅显微镜下获得的颗粒图,计算出每个粒子的面积、长轴、短轴。
用列表的形式给出计算结果。
实验目标很明确:
1、对图像中的连通片进行提取
2、统计出每个连通元的面积
3、计算长轴和短轴
语言C。
2、实验方法
1)图像二值化
阈值与结果有很大的关系,图像中一些细小的点很多,而且明暗变化于0~255之间,所以阈值过大时会排除掉很多点,程序中使用的折中的125。
2)区域标记
简单起见,考虑4-连通的情况。
本图中,4-连通与8-连通有一点差别,如下一块,着色不同表示不连通。
8连通时,左上角的小块跟大块是连通的。
实际标记时利用了两个模板,前者用于正向扫描,后者用于逆向扫描。
0A001A
B100B0
实验中,正向扫描先考察A,A有标记(无标记,默认是-1),则当前位置表为A_mark,否则,如果B有标记,则标为B_mark,否则,用新的计数;逆向扫描类似。
存储标记的节点如下:
typedefstructPNode{
charpixel;//像素
intmark;//标记
}PNode;
第一次正向扫描结果如下:
(用不同的颜色表示不同的计数)
部分放大:
逆向扫描结果如下:
还有六处没有正确标记的,其中一处如下:
这是可以理解的,比如如下的情况:
-1222222-1
-1-1111-1-1-1
由于逆向扫描时,先考虑右边像素再考虑下方像素,则蓝色下划线的“2”处仍然不变。
第二次正向扫描,得到正确的标定:
(即,每个连通片只有一种颜色)
3)整理标记,统计面积
由于标记本身并没有完全按照计数的顺序排列(只是同一连通片当中的标记相等而已),因此进行一次整理,同时维护一个存储面积和整理过后的计数(依次排列)的链表,如下:
typedefstructNUMNode{
intmark;//标记
intnum;//像素个数(面积)
NUMNode*next;
}NUMNode;
将2)结构中的pix数组中的计数处理后存入链表,由于同一连通片拥有一样的标记,根据标记进行查找,统计出各连通片的面积(包含的像素个数)。
4)长轴计算
重新定义一个结构体数组,每个结构体记录了一个连通片的边缘信息,结构如下:
typedefstructEDGEENode{
inten;//边缘点个数(周长),
intx[300];//边缘点的x坐标,数组长度只要比max{en}大就可以了
inty[300];//边缘点的y坐标
floatlo;//连通片长轴
floatsh;//连通片短轴
}EDGEENode;
维护这一数组是为了方便理解和处理。
数组的有效长度即连通片的个数(本图为30),首先根据计数值提取各个连通片的边缘像素的值以及个数(对于4-连通,边缘像素就是上下左右存在黑色像素),从而,可以将长轴与短轴的计算都局限在一个小范围中。
长轴的获取就是计算边缘点中相距最远的两点的距离,考虑到有很多连通片只有很少的几个像素组成,为了相互区别,因此使用的欧拉距离。
5)短轴计算
短轴的计算其实是一个很复杂的过程,按照定义,我的理解就是,在长轴的垂直方向上,距离最远的两个点的距离。
垂直用斜率k1*k2=-1表示,对于k1或者k2不存在或者为0的情况,单独考虑。
但是,关键问题在于,当长轴确定时,k1的值是精确的,但是计算得到的-1/k1与实际两点间的k2不可以能完全符合,或者说,连通片中甚至都不存在跟长轴完全垂直的两点,因此,短轴的选择是一个取舍问题。
1、如果连通片很大,则这一问题不明显,我们还可以按照取min{k1*k2+1}得到“最为”垂直的点,然后在这些点中寻找相距最远的两点。
2、但是如果连通片很小,则会出现很多细节问题,比如短轴甚至不存在,或者说即使是min{k1*k2+1}对应的k2也显然不是垂直的关系。
因此第二种方法是限定阈值,即fabs(k2+1/k1)<=Threshold,理想情况自然是Threshold=0,但是问题是,差值选多少比较合适;|k1|大时,|k2|很小,反之亦然,所以按照百分比取阈值,实验中使用的(1/fabs(k1))*0.5;即50%。
由于最终结果的好坏与否很难评定,因此实际上我也不知道这么选择是否合适,但是调整阈值大小可以看出变化,当阈值变小(比如用10%),则很多包含像素较少的连通片的短轴都会变为0。
3、结果分析及结论
程序运行前,请将图像放在D:
\目录下,并且命名为1.png。
运行后在D:
\目录下形成2.png,3.png,4.png,即上面贴出的几张图。
实验结果如下:
Mark是标记计数,Edge_n为周长,S_n为面积,long为长轴,short为短轴。
由于只是实现功能,所以代码部分很简陋,也没有定义函数,结构体定义也在SD1SD2.cpp中,只有一个主函数,具体实现都在主函数中。
基于VC6,用到了少量OpenCV的存储读取等功能函数。
4、参考资料
课程PPT
5、C代码
#include
#include
#include
typedefstructPNode{
charpixel;
intmark;
}PNode;
PNodepix[500][500];
typedefstructNUMNode{
intmark;
intnum;
NUMNode*next;
}NUMNode;
typedefstructEDGEENode{
inten;
intx[300];
inty[300];
floatlo;
floatsh;
}EDGEENode;
EDGEENodeEn[100];
voidmain(){
inti,j,k,imax,imin,jmax,jmin;
IplImage*img=cvLoadImage("d:
\\1.png");
intdn=img->nChannels;
intheight=img->height;
intwidth=img->width;
intwidth0=img->widthStep;
char*p=img->imageData;
imin=0;
jmin=0;
imax=width;
jmax=height;
intflag=0;
inti0=0;
inti1=0;
cvThreshold(img,img,125,255,CV_THRESH_BINARY);
cvNamedWindow("img1",CV_WINDOW_AUTOSIZE);
for(j=jmin;jfor(i=imin;ipix[j][i].pixel=*(p+width0*j+i*dn);
pix[j][i].mark=-1;
}
}
//正向扫描
for(j=jmin;jfor(i=imin;iif(pix[j][i].pixel==0)//黑点
continue;
i1++;
//如果是白点,则考虑AB位置是否有白点,有,则编号
if(j-1>=jmin&&pix[j-1][i].pixel==-1){
pix[j][i].mark=pix[j-1][i].mark;
}
elseif(i-1>=imin&&pix[j][i-1].pixel==-1){
pix[j][i].mark=pix[j][i-1].mark;
}
else{
//都黑
i0++;
pix[j][i].mark=i0;
}
}
}
for(j=jmin;jfor(i=imin;iif(pix[j][i].pixel==-1){
*(p+width0*j+i*dn)=(pix[j][i].mark*50)%255;
*(p+width0*j+i*dn+1)=(pix[j][i].mark*70)%255;
}
}
}
cvSaveImage("d:
\\2.png",img);
//逆向扫描
for(j=jmax;j>jmin;j--){
for(i=imax;i>imin;i--){
if(pix[j][i].pixel==0)//黑点
continue;
//如果是白点,则考虑AB位置是否有白点,有,则编号
if(i+1<=imax&&pix[j][i+1].pixel==-1){
pix[j][i].mark=pix[j][i+1].mark;
}
elseif(j+1<=jmax&&pix[j+1][i].pixel==-1){
pix[j][i].mark=pix[j+1][i].mark;
}
}
}
for(j=jmin;jfor(i=imin;iif(pix[j][i].pixel==-1){
*(p+width0*j+i*dn)=(pix[j][i].mark*50)%255;
*(p+width0*j+i*dn+1)=(pix[j][i].mark*70)%255;
}
}
}
cvSaveImage("d:
\\3.png",img);
//第二次正向扫描
for(j=jmin;jfor(i=imin;iif(pix[j][i].pixel==0)//黑点
continue;
//如果是白点,则考虑AB位置是否有白点,有,则编号
if(j-1>=jmin&&pix[j-1][i].pixel==-1){
pix[j][i].mark=pix[j-1][i].mark;
}
elseif(i-1>=imin&&pix[j][i-1].pixel==-1){
pix[j][i].mark=pix[j][i-1].mark;
}
}
}
for(j=jmin;jfor(i=imin;iif(pix[j][i].pixel==-1){
*(p+width0*j+i*dn)=(pix[j][i].mark*50)%255;
*(p+width0*j+i*dn+1)=(pix[j][i].mark*70)%255;
}
}
}
cvSaveImage("d:
\\4.png",img);
//统计标志和面积
NUMNode*np=NULL;
NUMNode*np1,*np2;
flag=0;
intken;
for(j=jmin;jfor(i=imin;iif(pix[j][i].pixel==0)//黑点
continue;
else{
np1=np;
np2=np;
flag=0;
if(np==NULL){
np=newNUMNode;
np->mark=pix[j][i].mark;
np->num=1;
np->next=NULL;
continue;
}
while(np1!
=NULL){
if(np1->mark==pix[j][i].mark){
np1->num++;
flag=1;//已经有了
break;
}
np2=np1;
np1=np1->next;
}
if(flag==0){//没有
np2->next=newNUMNode;
np2->next->mark=pix[j][i].mark;
np2->next->num=1;
np2->next->next=NULL;
}
}
}
}
//统计En数组,存储各连通元的边缘坐标与周长
for(j=0;j<100;j++){
En[j].en=0;
}
for(j=jmin;jfor(i=imin;iif(pix[j][i].pixel==0)//黑点
continue;
else{
np1=np;
np2=np;
flag=0;
while(np1!
=NULL){
if(np1->mark==pix[j][i].mark){
if((j-1>jmin&&pix[j-1][i].pixel==0)||(i-1>imin&&pix[j][i-1].pixel==0)||(j+1//周围有黑点,则说明是边界点
ken=En[np1->mark-1].en;
En[np1->mark-1].x[ken]=i;
En[np1->mark-1].y[ken]=j;
En[np1->mark-1].en++;
}
break;
}
np2=np1;
np1=np1->next;
}
}
}
}
np1=np;
i=1;
while(np1!
=NULL){
En[i-1].en=En[np1->mark-1].en;
for(j=0;jmark-1].en;j++){
En[i-1].x[j]=En[np1->mark-1].x[j];
En[i-1].y[j]=En[np1->mark-1].y[j];
}
np1->mark=i;
np1=np1->next;
i++;
}
i0=i-1;
//i-1即为连通元个数,也是En数组的长度
for(j=jmin;jfor(i=imin;iif(pix[j][i].pixel==-1){
*(p+width0*j+i*dn)=(pix[j][i].mark*50)%255;
*(p+width0*j+i*dn+1)=(pix[j][i].mark*70)%255;
}
}
}
cvShowImage("img1",img);
printf("白像素个数:
%d\n",i1);
intdistance,dmax=0,dx,dy;
intlx1,lx2,ly2,ly1,y,x;
floatk1,k2,dk2;
//利用En数组统计各连通元长轴
for(i=0;idmax=0;
for(j=0;jfor(k=0;kdx=En[i].x[j]-En[i].x[k];
dy=En[i].y[j]-En[i].y[k];
if((distance=dx*dx+dy*dy)>dmax){
dmax=distance;
lx1=En[i].x[j];
lx2=En[i].x[k];
ly1=En[i].y[j];
ly2=En[i].y[k];
}
}
}
En[i].lo=(float)pow((double)dmax,0.5);
dmax=0;
if(En[i].lo==0){
//长轴为0
En[i].sh=0;
continue;
}
elseif(lx2==lx1){
//长轴为y轴方向
dmax=0;
for(j=0;jy=En[i].y[j];
x=En[i].x[j];
for(k=0;kif(En[i].y[k]==y){
if((dx=abs(En[i].x[k]-x))>dmax)
dmax=dx;
}
}
}
En[i].sh=dmax;
continue;
}
elseif(ly2==ly1){
//长轴为x轴方向
dmax=0;
for(j=0;jy=En[i].y[j];
x=En[i].x[j];
for(k=0;kif(En[i].x[k]==x){
if((dx=abs(En[i].y[k]-y))>dmax)
dmax=dx;
}
}
}
En[i].sh=dmax;
continue;
}
else
k1=(float)(ly2-ly1)/(lx2-lx1);
dmax=0;
k2=0;
dk2=(1/fabs(k1))*0.5;
for(j=0;jfor(k=0;kif(k==j)
continue;
k2=(float)(En[i].y[k]-En[i].y[j])/(En[i].x[k]-En[i].x[j]);
//printf("%0.1f",k1*k2);
if(fabs(k2+1/k1)<=dk2){
//k1*k2=-1,则垂直
dx=En[i].x[j]-En[i].x[k];
dy=En[i].y[j]-En[i].y[k];
if((distance=dx*dx+dy*dy)>dmax){
dmax=distance;
lx1=En[i].x[j];
lx2=En[i].x[k];
ly1=En[i].y[j];
ly2=En[i].y[k];
}
}
}
}
En[i].sh=(float)pow((double)dmax,0.5);
}
np1=np;
printf("Mark\tEdge_n\tS_n\tlong\tshort\n");
while(np1!
=NULL){
printf("%d\t%d\t%d\t%0.1f\t%0.1f\n",np1->mark,En[np1->mark-1].en,np1->num,En[np1->mark-1].lo,En[np1->mark-1].sh);
np1=np1->next;
}
cvWaitKey(0);
}
 升级会员
升级会员 