毕业设计说明书论文正文结论参考文献等标准格式理工科专业学生用DOC.docx
《毕业设计说明书论文正文结论参考文献等标准格式理工科专业学生用DOC.docx》由会员分享,可在线阅读,更多相关《毕业设计说明书论文正文结论参考文献等标准格式理工科专业学生用DOC.docx(22页珍藏版)》请在冰豆网上搜索。
毕业设计说明书论文正文结论参考文献等标准格式理工科专业学生用DOC
1绪论
1.1灌装机械概述
灌装机械的主要作用是将液体介质充填到包装容器中,灌装机械一般可以实现灌装、封口等功能。
根据灌装介质中是否含气体或是否会生成气体可将灌装介质分为:
硬饮料(含酒精成分的含气饮料)、软饮料(不含酒精成分的含气饮料)、不含气体液体(如白酒和醋等)。
由于灌装产品的物理化学性质,特别是黏度、含气量不同,灌装要求也有所不同,常用的液体灌装方法有:
常压灌装法、等压灌装法、负压灌装法、微负压灌装法。
按包装容器的主要运动形式分类:
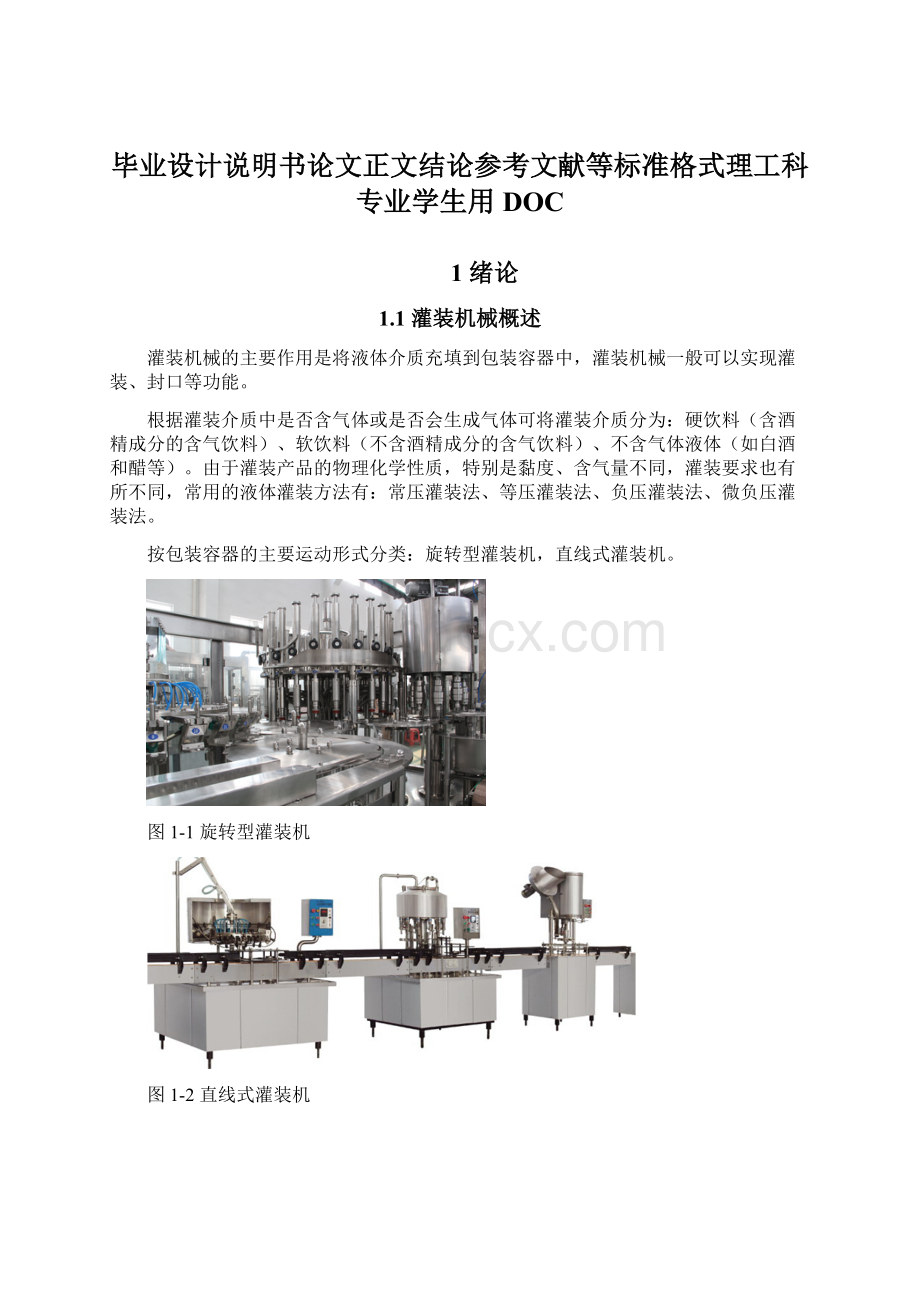
旋转型灌装机,直线式灌装机。
图1-1旋转型灌装机
图1-2直线式灌装机
1.2PLC简介
可编程控制器(ProgrammableLogicController,PLC)是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存储器,在其内部存储执行逻辑运算、顺序控制器、计数、定时和算术运算等操作指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或自动化设备以及生产过程。
PLC的特点
1)易操作且共用性好
2)功能多,环境适应性好
3)良好的稳定性和防干扰能力
4)编程易学易懂
5)设计、安装、调试方便简单
6)封装性好、能耗不高
PLC的应用范围
(1)开关量的逻辑控制
(2)运动控制
(3)闭环过程控制
(4)数据处理
(5)通信联网9
2CGF24-24-8型灌装机控制系统方案设计
2.1CGF24-24-8型灌装机的工艺要求
课题研究的是高速清洗灌装旋盖三合一机,为24头旋转型液体灌装机,主要灌装介质为水。
该灌装机结构上主要由风道进瓶组件、清洗组件、灌装组件、旋盖组件、出瓶组件五大部分组成,要求对于500ml的PET瓶可以实现高速稳定精确灌装,且实现无瓶不灌装、无瓶不加盖及在线清洗等功能。
主要技术要求为:
(1)灌装速度从12000瓶/h提高到18000瓶/h;
(2)灌装对象为500ml的PET瓶,灌装介质为水;
(3)灌装的容量误差≤2%;
(4)保证灌装时无滴漏、无泡沫产生;
(5)保证无瓶不灌装,无瓶不加盖;
(6)可以实现完整的CIP清洗(不拆卸设备、零部件、管道的情况下,通过使用清洗溶液对设备进行清洗后能达到食品生产的卫生级要求);
(7)灌装机设计符合国标GB16789-1997食品机械安全卫生要求。
2.2CGF24-24-8型灌装机的整体结构
论文所研究的CGF24-24-8型灌装机三维示意图(灌装组件隐藏了防尘罩)如图2-1所示,结构部分主要分为风道进瓶组件、清洗组件、灌装组件、加盖组件、出瓶组件等部分组成,结构图如阁2-2所示,各组件及其作用如下:
图2-1灌装机三维示意图
图2-2灌装机结构图
1—机箱组件;2—风道进瓶组件;3—过渡盘Ⅰ;4一洗瓶组件;5—过渡盘Ⅱ;
6—灌装组件;7—过渡盘Ⅲ;8—供盖组件;9一加盖组件;10—出瓶组件
2.3CGF24-24-8型灌装机控制系统的方案设计
控制系统的作用就是对开关、按钮、传感器等输入信号进行分析,从而做出响应来控制各执行机构完成相应的动作,使整个灌装过程准确而有序得进行。
图2-3为常用的电气控制系统的组成图。
图2-3电气控制系统组成图
工艺流程是控制系统设计的主要依据,也是控制系统依托机械部分要实现的目标,不同的工艺流程,其控制方案也不同。
图2-4灌装工艺流程图
根据CGF24-24-8型灌装机的工艺要求,对照其灌装的工艺流程,依据一般电气系统的组成确定控制系统各部分如下:
输入元件,控制中心,执行元件:
伺服电机,步进电机,电动机,电磁体,指示灯。
系统采用HMI(人机界面,HumanMachineInterface)控制灌装机的机械动作
(2),控制系统框图如图2-5所示。
图2-5控制系统框图
3CGF24-24-8型灌装机灌装关键技术研究
本章主要围绕以下三个方面进行:
(1)一个伺服菜控制两个灌装头的连续灌装的灌装流程;
(2)伺服泵的速度如何分配以提高灌装速度并防止飞溅和溢出;(3)如何控制步进电机以实现快速、精确的换向。
3.1灌装流程
图3-1灌装示意图
图3-1所示为复位之后灌装部分的流程图,图所示位置为24号灌装头在1号工位时的情形。
灌装时,每个灌装头对应一个瓶子进行灌装。
按下启动按钮,灌装轮盘开始转动,灌装开始。
1号工位是灌装的开始工位,9号工位为灌装停止工位,17号工位为出瓶工位。
对于每个灌装头来说,它的工作流程为:
1号工位开始灌装一9号工位灌装结束一17号工位出瓶。
前面己经介绍过,XG-24128型灌装机最大的特点是一个伺服泵对应两个灌装头的连续灌装,同一伺服泵控制的两个灌装头呈180度安装。
以1号伺服泵为例,控制1号灌装头和13号灌装头,1号灌装头和13号灌装头分别执行上述的灌装一停止一出瓶动作,所以每个伺服泵的工作流程为灌液一吸液一灌液一吸液,图4-2所示为单个伺服泵的工作流程图(图中n为小于等于12的自然数)。
灌装所用陶瓷泵有两个出液口和一个进液口,伺服泵要完成灌装一吸液一灌装一吸液动作,两次灌装分别从两个出液口出液,吸液从进液口进液,所以每次灌装与吸液动作之间,陶瓷泵都要经过一次换向。
图4-3所示为灌装组件灌装的详细流程图(灌装从n=l开始)。
图中n为小于等于12的自然数。
图3-2灌装流程图
3.2灌装头位置确定
首次灌装为1号灌装头的灌装。
初次吸液完成以后,空瓶进入灌装组件后,当1号灌装头运动到1号工位处,有无瓶检测传感器3检测此时有瓶,则1号灌装头就开始灌装。
灌装开始后为确定灌装组件上各灌装头的位置,灌装组件主轴上安装有编码器,对灌装主轴的旋转免度进行测量。
采用单圈式绝对编码器,通过PLC的串行通讯模块读取出每个编码。
24个灌装头(对应12个陶瓷泵)在复位之后有其固定的位置,对应编码器输出有一个确定的编码,这样就可以确定每个泵的位置,从而可以对各个泵的工作状态进行控制。
用分辨率为1024的编码器来测量旋转角度时,24个灌装头对应的编码以42.7递增。
复位完成之后,1号灌装头在24号工位;开始灌装之后,灌装主轴旋转15度时,对应编码为42.7时,即为1号灌装头转动到灌装的起始工位(1号工位),以此类推,则在1号工位,不同编码值对应的灌装头及伺服泵如表3-1所示。
表3-1编码值对应表
编码值
对应的灌装头
编码值
对应的编码头
对应的伺服泵
42.7
1号
42.7*13
13号
1号
42.7*2
2号
42.7*14
14号
2号
42.7*3
3号
42.7*15
15号
3号
42.7*4
4号
42.7*16
16号
4号
42.7*5
5号
42.7*17
17号
5号
42.7*6
6号
42.7*18
18号
6号
42.7*7
7号
42.7*19
19号
7号
42.7*8
8号
42.7*20
20号
8号
42.7*9
9号
42.7*21
21号
9号
42.7*10
10号
42.7*22
22号
10号
42.7*11
11号
42.7*23
23号
11号
42.7*12
12号
42.7*24
24号
12号
PLC通过其串行通讯模块读取编码器的编码值并以此来判断灌装头的位置。
首次灌装完成以后,PLC读取到编码为42.7n或42.7(n+12)时,在灌装开始工位(1号工位)的即为第n号或第(n+12)号灌装头,于此对应的n号伺服泵启动,完成灌装动作。
也就是说,灌装开始之后,若检测到1号工位此时有瓶,则每个灌装头到达1号工位时,其对应的伺服泵就开始灌装动作。
3.3灌装速度确定
国内灌装机的灌装速度普遍比较低,同时还存在着灌装稳定性不高、精度稳定性差等问题。
其中很大一部分原因是因为灌装速度提高以后,虽然提高了生产效率,但速度的提高也使得灌装中的飞溅、泡沫问题更为严重,从而影响灌装的质量。
所以,对灌装速度高达18000BPH的大容量、高精度、高稳定性的饮料类灌装机的灌装速度进行深入研究是很有必要的。
由于灌装速度快且要求灌装精度高,不能有气泡、溢出、滴漏等情况出现,所以灌装时采用跟踪灌装模式。
圆周方向上,瓶子和灌装头都跟随灌装组件以相同的速度旋转,所以圆周方向瓶子和灌装头相对静止;垂直方向,灌装开始时灌装头伸入到瓶子内部进行灌装,整个灌装过程中,灌装头头部距离液面始终保持固定距离,以减少飞溅和气泡的产生,灌装头垂直方向的运动由凸轮曲线实现。
此外,为了减小高速灌装带来的冲击及气泡,对灌装速度也作了更深入的研究。
灌装速度确定主要确定陶瓷泵吸液速度和灌液速度两部分。
对于旋转型自动灌装机,其生产能力--般用Q=60an进行计算:
要提高灌装的生产能力就必须增加灌装机头数a和提高转速。
如果增加灌装机的头数a来提高生产率,那么灌装机的旋转台直径也会相应增大,这样的话,一方面整个机器体积变大;另一方面,旋转台转速一定时,还必须考虑离心力的影响,要保证瓶子在灌装过程中绕主轴旋转产生的离心力小于瓶子与瓶托之间的摩擦力,否则瓶子会被抛出托瓶台,影响整个灌装过程的顺利进行。
如果采用提高主轴的转速n来提高生产率,除了同样要考虑离心力之外,还要考虑灌装时间,要保证有足够的时间使得瓶子在限定的灌装区域内完成定量灌装的要求。
根据生产要求,生产能力从12000瓶/h提高到18000瓶/h,生产效率提高了50%,灌装机的头数不变,通过提高灌装台的转速来达到生产的工艺要求。
灌装台的转速12.5r/min,完成一个工作循环4.8s。
由于CGF24-24-8型灌装机采用的是一个伺服泵同时控制两个灌装头并实现连续灌装的控制设计,也就是说主轴旋转一周,伺服泵要完成两次吸液和两次灌液,所以,CGF24-24-8型灌装机伺服泵每完成一个工作循环(一次吸液和一次灌液)的时间为1.5s。
主轴旋转一周所需时间T为4.8s,CGF24-24-8型灌装机共有24个工位,则每个工位的运动时间为0.2s。
也就是说,灌装机每转过一个工位所需时间为0.2s,根据T工位对式中所求的灌液时间进行修正,同时若使用一个伺服泵对一个灌装头进行灌装,则1号工位升始灌装,17号工位出瓶,每个工位运行时问为0.2s,灌装时间为3.2s,CGF24-24-8型灌装机每个伺服泵控制两个灌装头,取灌液时间为主轴运动8个工位的吋间为1.6s。
电机位移,吸液和灌液时,电机位移大小相同,方向相反。
确定了吸液时间Tx和灌液时间Tg后,对吸液速度和灌装速度的分配分别进行研究。
1、吸液
伺服电机正转时,通过丝杆带动陶瓷泵向上运动,完成吸液动作。
吸液过程包括两次换向动作和一次吸液动作,伺服泵在工位9处完成灌装,工位9至工位13为吸液区间。
在此区间内,首先,陶瓷泵内芯在步进电机的带动下先从出液口转到吸液口,然后由伺服电机带动陶瓷泵完成吸液动作,最后灌满液体的陶瓷泵在步进电机带动下旋转120度到另一出液口,等待下一次灌装命令。
也就是说,每一次吸液过程为:
换向一吸液一换向。
吸液过程的总时间Tx为0.8s,步进电机带动陶瓷泵旋转120度的极限时间为0.075s,而每个吸液过程有两次换向,所以单个吸液动作的时间为0.6s。
为了提高吸液速度,缩短吸液时间,吸液动作采用单速模式。
启动后,伺服电机在最短的时间内加速到给定的吸液速度V吸,以给定吸液速度V吸匀速转动到给定地址后快速停止。
整个吸液过程中,电机的转动位移一定,从而使得陶瓷泵每次吸液容量一定,以保证灌装精度。
由于吸液时电机为高速转动,所以给定速度V吸接近于吸液时陶瓷菜平均速度V吸平对此速度进行修正,电机的加速和减速时间初定为100ms,则吸液时陶瓷泵的运动速度曲线如图:
图3-3运动速度曲线
2、灌液
灌液时,伺服电机反转通过丝杆带动陶瓷菜内芯向下运动进行灌装。
灌液从1号工位开始至9号工位结朿,整个灌液时间Tg为1.6s。
灌液时,高速灌装易形成飞溅、气泡或溢出,但灌装效率高;低速灌装的灌装质量好,但灌装效率偏低,达不到生产工艺要求。
为了实现高速高质赏高精度的灌装要求,CGF24-24-8型灌装机釆用双速灌装模式。
灌液开始时,伺服电机迅速加速到高速度V灌1,以匀V灌1速灌装一段时间,主要目的是完成大部分液体的灌装;到达位置A点后减速至V灌2,以低速V灌2完成剩余液体的灌装。
这种双速灌装模式最大的好处在于:
灌装初期以高速完成大量液体的灌装,保证灌装效率;后期以低速灌装,保证灌装质量。
图3-4灌液速度曲线图
吸液速度和灌液速度分配初步确定以后,在定位模块QD70P8中对电机的各运动参数根据计算结果进行设置,则伺服电机带动陶瓷泵按照图3-3、图3-4所示运动曲线动作,完成吸液和灌液动作。
吸液速度和灌液速度的最佳分配还要由后期的实验结果进行修正。
4CGF24-24-8型灌装机控制系统软件设计
4.1灌装机PLC控制程序设计
PLC控制系统的软件设计实质上就是根据系统控制要求将工艺控制流程图转换为梯形图、语句表或功能块图的形式,编写PLC控制程序是软件设计的具体体现形式。
而在软件设计中,正确的设计思想是至关重要的。
由于生产过程控制要求的复杂程度不同,可将程序按结构形式分为基本程序和模块化程序。
基本程序:
既可以作为独立程序控制简单的生产工艺过程,也可以作为组合模块结构中的单元程序;依据计算机程序的设计思想,基本程序的结构方式有三种:
顺序结构、条件分支结构和循环结构。
模块化程序:
把一个总的控制目标程序分成多个具有明确子任务的程序模块,分别编写和调试,最后组合成一个完成总任务的完整程序。
这种方法叫做模块化程序设计。
CGF24-24-8型灌装机控制对象有伺服电机、步进电机及其他电动机等,控制较为复杂,程序庞大,所以采用模块化编程。
程序设计过程中,针对控制系统的操作方式、参数初始化过程、故障处理、报警处理、伺服运动控制、步进运动控制、电磁体运动控制、CIP清洗等分别设计成具有单独功能的子程序,系统运行后,根据控制需求依次调用各个子程序,完成控制目标。
采用这种编程方式,可以对各个功能模块分别编程,分别调试,提高了程序的可读性和通用性,也有利于后期程序的査错和修改和管理。
图4-1流程图
灌装机进瓶机构是采用风道进瓶,空瓶传送过程中可能会出现个别工位无瓶子的情况。
若此时继续灌装,不仅浪费灌装原料,而且会污染灌装设备,所以CGF24-24-8型灌装机要求控制系统做到无瓶不灌装。
伺服泵一个工作循环中要进行两次瓶位检测,若第一次检测时,传感器检测到灌装工位无瓶,PLC控制相应的伺服荥不动作,对应灌装头不灌装。
山于灌装机一个伺服泵控制两个灌装头,所以,无瓶不灌装动作执行之后,相应的伺服泵虽然不吸液,但要换向到另一出液口;当伺服泵控制的另一灌装头运动到灌装工位后,第二次检测若有瓶,则对应灌装头进行灌装,若无瓶,则不灌装不吸液,换向到另一出液口。
图4-2无瓶不灌装程序图
灌装完成后的瓶子在过渡星型轮盘带动下进入加盖组件。
若在灌装工位,检测相应无瓶不灌装后,到加盖组件,相应的工位也无瓶。
此时,为了避免对无瓶工位进行加盖造成瓶盖的浪费或灌装机械卡盖构成机械故障,CGF24-24-8型灌装机要求无瓶不加盖。
灌装开始后,止盖电磁体的弹片是吸合的,通过供盖机构将瓶盖送入加盖头,完成加盖动作。
若传感器检测相应的加盖工位无瓶,PLC控制止盖电磁体的中间继电器得电,止盖电磁体弹片弹出,瓶盖无法通过供盖机构进入加盖头,从而实现无瓶不加盖。
当下一个传感器信号发出吋,若为有瓶,则上盖电磁体弹片吸合,继续供盖;若为无瓶,继续执行无瓶不加盖。
图4-3无瓶不加盖流程图
4.2PLC编程软件GXDeveloper简介
CGF24-24-8型灌装机所用的编程软件是三菱公司基于Windows环境下的GXDeveloper它可以完成程序的创建、对可编程控制器进行读入和读出、对软件或梯形图进行监视、对所编写的顺控程序进行调试以及PLC诊断等功能,配合以仿真软件,还可以进行仿真,是三菱系列产品编程时常的软件,GXDeveloper编程软件因具有以下优点,所以被广泛应用。
1、通用性
GXDeveloper通用性广,对三菱所有系列的可编程控制器都适用,当可编程控制器的类型不同的,GXDeveloper的操作方式基本相同,且当编程控制器类型改变时,GXDeveloper中所作的设置也可以共用。
2、操作性能大幅提高
GXDeveloper吸取了Windows中Excel、Word文字、图表等可以粘贴和复制的优点,对GXDeveloper中创建的注释及其他数据进行粘贴和复制,充分利用现有资源,提高了操作效率。
3、程序的标准化
GXDeveloper可以使兩标签代?
f软元件来创建标准的程序,对此程序进行编译就可形成实际的执行程序;此外GXDeveloper开发了功能块的功能,相当于制图时的块操作功能,将编写顺控程序时常用的程序梯形图转化为功能块,编写其他程序时若需要直接引用即可,大大提高了编程效率,可靠地减少程序输入时的错误;将任意梯形图标以名称存储到文件中,此后编程时只需输入简单的指令就可读出已标记的梯形图,使编程界面更加人性化和便捷化。
4、丰富的编程语言
GXDeveloper的编程语言多,可以适合绝大多数的编环境,常的编程语言有梯形图语言、MELSAP3(SFC)、MELSAP-L及结构化文本(即ST语言)。
ST语言类似于C语言,使用ST语言编程虽不像梯形图一样简单易懂易学,但它对于复杂的运算处理及分支形的选择性语句和循环语句编写时,比梯形图简洁,程序占用内存量小,对于程序引用次数多且有复杂运算时尤显其优势。
5、通过简单设置即可方便地访问其他站
6、连接及通信方便,通过USB接口可以直接与三菱Q系列、FX系列的可编程控制连接;通过串行口通讯可以与实现与三菱几乎全部的可编程控制器进行直接连接并进行数据的传输和交换。
7、丰富的调试功能
安装GXSimulator后只需对CPU进行设置,不用与实际的CPU连接,也不用创建模拟调试程序即可进行模拟调试;调试时创建数据一旦出错,系统就会给出出错的原因,从而缩短数据创建的时间。
创建新工程之后,依据控制要求编写控制程序。
用户可以在编程区域单击工具条上的图标或快捷方式进行编程。
在梯形图写入模式下完成PLC程序的编写之后,需要将其变换为PLC内部格式后进行存储,存在错误的梯形同不能变换,也就不能存储。
通过"在线"功能可以将变换后的程序写入PLC中进行监控或调试,在调试菜单下可以进行软元件测试、强制输入或输出、调试、跳跃执行、部分执行和单步执行操作,进一步检查程序的正确性和可行性。
CGF24-24-8型灌装机控制系统设计中,伺服电机和步进电机的运动对整个灌装系统的运行、灌装精度及灌装质量都有很大影响,所以对伺服电机和步进电机的运动控制显得尤为重要。
灌装机控制系统由QD70P8定位模块对伺服电机进行运动控制,本节灌装机的控制程序设计主要介绍伺服电机的控制程序。
控制系统的参数和控制数据可以通过GXConfigurator-PT进行设置,也可以通过编写顺控程序进行设置,当使用GXConfigurator-PT进行设置时,不需要流程图上的N0.1至No.3部分。
当控制轴数较多时,使用顺控程序对轴参数和控制数据进行设置时,会使得整个控制程序过于庞大;此时使用GXConfigurator-PT进行设置,可以在很大程序上简化程序。
CGF24-24-8型灌装机控制系统的参数和控制数据通过GXConfigurator-PT进行设置的。
图4-4QD70P8程序控制流程图
4.3梯形图
图4-5程序图
5系统调试
灌装机控制系统硬件设计和软件设计完成之后,PLC就可以根据用户的控制要求进行灌装和生产。
由于控制系统没有人机界面功能,所以无法对系统的运行状况进行实时显示和监控,工艺参数更改时也需专业人员操作。
为了提高系统的可操作性,灌装机控制系统采用触摸屏和PLC相结合的方式,用户可以通过触摸屏实时监测系统的运行情况,也可以方便地对系统进行工艺参数设置。
触摸屏与PLC系统连接之后,分别对触摸屏通讯口和PLC通讯口进行设置,借助于触摸屏专用软件,可以实现触摸屏与PLC之间的正常通讯。
CGF24-24-8型灌装机选用的人机界面是三菱公司的GT1575系列的触摸屏,该系列的触摸屏分辨率为640*480,显示色为256色,可视角度广,亮度高,内置多类接口,可以实现与各类外接设备相接。
此外,该系列的触摸屏具有显示、运算、高速通讯功能、高速运算功能,使操作更加快捷。
不仅可以连接三菱PLC,也可与其他品牌的PLC之间实现高速通讯。
灌装机触摸屏的画面设计所用的是三菱公司的GTDesinger2组态软件,它的设计界面如图所示。
图5-1设计界面
GTDeSigner2可以进行工程创建、画面创建、绘制图形、公共设置、对象配置/设置、向GOT传送数据等。
使川GTDesigner2新建工程时,首先根据设置向导的提示设置所使用的触摸屏类型、显示色、连接的机器类型及画面切换软元件等,避免遗漏触摸屏设计需设置的项目,流畅地制作画面。
画面设计时,可以使用系统自带的库功能,还可以将高品质部件库导入到用户库中,从而设计出友好的人机界面。
图5-2欢迎界面
图5-3操作主界面
图5-4复位界面
图5-5手动运行界面
图5-6监控界面
图5-7显示界面
显示界面,分为灌装显示和加盖显示及生产效率三部分。
在灌装显示中,用户通过仪表盘选定要显示的灌装泵号,如选定1号泵,显示界面就会显示出1号泵的液位(吸液和灌液)和速度曲线。
加盖显示可以显示瓶盖状态及加盖状态。
通过显示界面,用户基本可以了解灌装机的运行状态及生产状况。
结论
本文论述了灌装机及灌装技术的现状,针对控制对象的生产工艺要求设计了其控制系统方案。
为降低设备成本,提出了连续灌装的控制系统方案,基本实现了高速、精确、稳定的灌装。
本文所做的主要工作如下:
(1)根据控制对象的生产工艺要求及灌装流程,完成了灌装机控制系统的整体方案设计。
(2)对灌装中连续灌装的控制进行了深入研究,包括灌装时灌装头位置的确定、伺服泵吸液速度和灌液速度的确定。
(4)对灌装机进行了软件设计。
在分析灌装机控制程序流程的基础上进行灌装机PLC控制系统程序的编制,并且对人机界面进行设计,使整个控制系统操作更加方便快捷。
由于时间和知识水平的限制,CGF24-24-8型灌装机的控制系统还存在很多不足,主要体现在:
(1)本文只对灌液速度和时间进行了初步分配,不同灌装介质的最大灌液速度和最佳灌液速度不同,灌液速度和时间的分配有待进一步的实验来调试和确定。
(2)控制系统采用了大量的传感器,且控制信号要经过滑环,对信号的抗干扰处理有待进一步地研究。
致谢
至此论文完成之际,首先要感谢我的导师冷雪锋老师。
冷老师严谨的治学态度、渊博的专业知识和丰富的实践经验让我受益匪浅。
在大学生活中,冷老师不仅在学业上教授我专业知识和经验,更是以师长的风范教导我为人处事的道理,使我终生受益。
论文从选题、搜集材料、构思、修改、到最后定稿的每一个阶段,冷老师都一直给予精心指导和启发,使得我的论文能顺利完成,在此向冷老师表示崇高的敬意和由衷的感谢。
参考文献
[1]刘品潇.电气控制与PLC[M].长沙:
国防
 升级会员
升级会员 