72高程控制测量.docx
《72高程控制测量.docx》由会员分享,可在线阅读,更多相关《72高程控制测量.docx(10页珍藏版)》请在冰豆网上搜索。
72高程控制测量
1、高程控制测量概述
高程控制测量就是在测区布设高程控制点,即水准点,用精确方法测定它们的高程,构成高程控制网。
高程控制测量的主要方法有:
水准测量和三角高程测量。
国家高程控制网是用精密水准测量方法建立的,所以又称国家水准网。
国家水准网的布设也是采用从整体到局部,由高级到低级,分级布设逐级控制的原则。
国家水准网分为4个等级。
一等水准网是沿平缓的交通路线布设成周长约1500km的环形路线。
一等水准网是精度最高的高程控制网,它是国家高程控制的骨干,也是地学科研工作的主要依据。
二等水准网是布设在一等水准环线内,形成周长为500~750km的环线。
它是国家高程控制网的全面基础。
三、四等级水准网是直接为地形测图或工程建设提供高程控制点。
三等水准一般布置成附合在高级点间的附合水准路线,长度不超过200km。
四等水准均为附合在高级点间的附合水准路线,长度不超过80km。
城市高程控制网是用水准测量方法建立的,称为城市水准测量。
按其精度要求:
分为二、三、四、五等水准和图根水准。
根据测区的大小,各级水准均可首级控制。
首级控制网应布设成环形路线,加密时宜布设成附合路线或结点网。
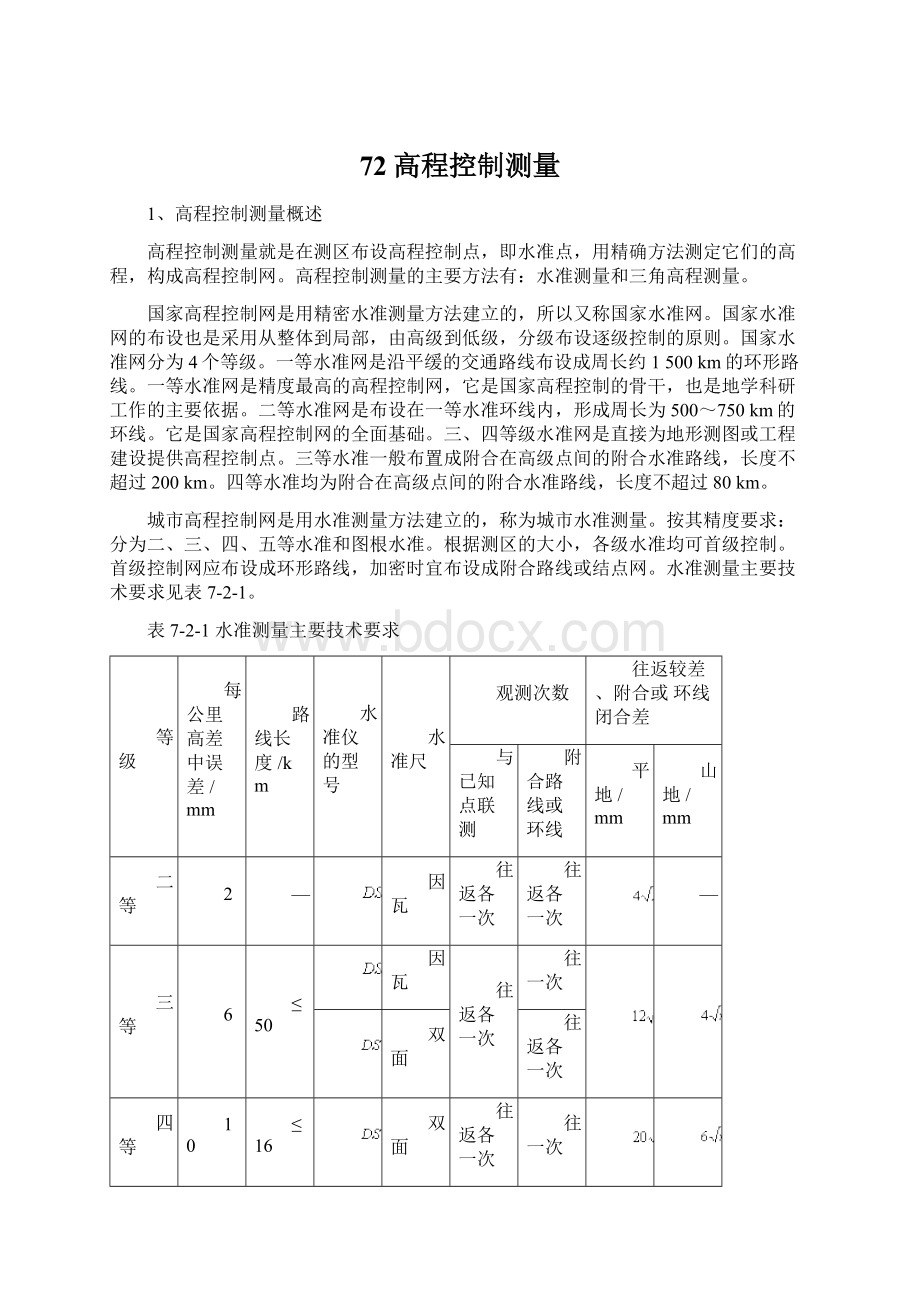
水准测量主要技术要求见表7-2-1。
表7-2-1水准测量主要技术要求
等级
每公里高差中误差/mm
路线长度/km
水准仪的型号
水准尺
观测次数
往返较差、附合或环线闭合差
与已知点联测
附合路线或环线
平地/mm
山地/mm
二等
2
—
因瓦
往返各一次
往返各一次
—
三等
6
≤50
因瓦
往返各一次
往一次
双面
往返各一次
四等
10
≤16
双面
往返各一次
往一次
五等
15
—
单面
往返各一次
往一次
—
图根
20
≤5
往返各一次
往一次
注:
①结点之间或结点与高级点之间,其路线的长度、不应大于表中规定的0.7倍;
②L为往返测段,附合或环线的水准路线长度以km为单位;n为测站数。
工程建设的高程控制测量,采用二、三、四、五等水准测量和图根水准测量等几个等级,其技术要求见教材表7-1-5。
在丘陵或山区,高程控制量测边可采用三角高程测量。
光电测距三角高程测量现已用于(代替)四、五等水准测量。
水准点间的距离,一般地区为2—3km,城市建筑区为1—2km,工业区小于1km。
一个测区至少设立三个水准点。
2、三、四等水准测量
三、四等水准测量应在通视情况良好、成像清晰、稳定的情况下进行。
三、四等水准测量的观测与计算方法如下:
(1)一个测站上的观测顺序
①后视水准尺黑面,使圆水准器气泡居中,读取下、上丝读数,转动微倾螺旋,使符合水准气泡居中,读取中丝读数。
②前视水准尺黑面,读取下、上丝读数,转动微倾螺旋,使符合水准气泡居中,读取中丝读数。
③前视水准尺红面,转动微倾螺旋,使符合水准气泡居中,读取中丝读数;
④后视水准尺红面,转动微倾螺旋,使符合水准气泡居中,读取中丝读数。
这样的观测顺序简称为“后—前—前—后”。
其优点是可以大大减弱仪器下沉误差的影响。
四等水准测量每站的观测,除了可采用三等水准测量的观测顺序外,也可以选择“后—后—前—前”的观测顺序。
(2)测站计算与检核
①视距计算
前、后视距差,三等水准测量,不得超过3m,四等水准测量,不得超过5m。
前、后视距累积差,三等水准测量,不得超过6m,四等水准测量,不得超过10m。
②同一水准尺红、黑尺面中丝读数的检核
同一水准尺红、黑面中丝读数之差,应等于该尺红、黑面的常数差K(4.687或4.787),三等水准测量,不得超过2mdR,四等水准溯量,不得超过3a3m。
③计算黑面、红面的高差
三等水准测量,不得超过3mm,四等水准测量,不得超过5mm。
式内0.100为单、双号两根水准尺红面零点注记之差,以米(m)为单位。
④计算平均高差
三(四)等水准测量成果计算见表7-2-2。
表7-2-2三(四)等水准测量成果计算表
3、三角高程测量
(1)基本原理
山地测定控制点的高程,若用水准测量,则速度慢,困难大,故可采用三角高程测量的方法,如图7-2-1所示。
但必须用水准测量的方法在测区内引测一定数量的水准点,作为高程起算的依据。
三角高程测量是根据两点的水平距离和竖直角计算两点的高差。
当两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响。
三角高程测量,一般应进行往返观测(双向观测),它可消除地球曲率和大气折光的影响。
图7-2-1三角高程测量原理
(2)高程的计算
用三角高程测量方法测定地面上一系列点的高程时,应将这些点尽可能的组成闭合或者附合的测量路线。
每两点之间均须进行对向观测,由它求得两点之间的高差平均值,并计算闭合环或附合路线的高程闭合差
,高差闭合差的限差:
式中D为各边的水平距离,以km为单位。
若,则按照与各边边长成比例的原则将反符号分配到各测段高差中,求出各测段改正后的高差,然后从起始点的高程计算出各待求点的高程。
1、GPS控制测量基本知识
(1)GPS控制测量概述
1)GPS控制测量的特点
GPS控制测量具有以下特点:
①观测站之间不需通视;
②定位精度高,而且具有良好的抗干扰性和保密性。
;
③观测时间短;
④提供三维坐标;
⑤操作简单;
⑥全球性、全天候作业。
2)GPS网形设计的一般原则
GPS网形设计就是根据用户要求,确定具体的布网观测方案,其核心是如何高质量低成本地完成既定的测量任务。
通常在进行GPS网设计时,必须顾及测站选址、卫星选择、仪器设备装置与后勤交通保障等因素;当网点位置、接收机数量确定以后,网的设计就主要体现在观测时间的确定、网形构造及各点设站观测的次数等方面。
因此,GPS网形设计的一般原则是:
①GPS网一般应采用由独立观测边构成的闭合图形;
②GPS网其相邻点间基线向量的精度应分布均匀;
③GPS网点应尽量与原有地面控制点重合;
④GPS网点应设在视野开阔和交通便利的地方。
3)GPS一般网形
一般GPS网应根据同一时间段内观测的基线边,即同步观测边构成闭合图形(称同步环),其一般网形有:
①三角形网
GPS网中的三角形由独立基线边组成,它需三台接收机,同步观测三条边,其中两条是独立边。
用于测量精度和可靠性要求较高的网。
②环形网
环形网是由若干个含有多条观测边的闭合环组成的网。
以增加检核条件,提高网的可靠性;环形网观测工作量小,自检能力较好,但相邻点间的基线精度分布不均匀。
③星形网
星形网图形简单,自检能力差,用于工程放样、边界测量等
(2)GPS外业观测
GPS测量的外业工作主要包括选点、建立观测标志、野外观测以及成果质量检核等;内业工作主要包括(GPS测量的技术设计、测后数据处理以及技术总结等。
如果按照GPS测量实施的工作程序,则可分为技术设计、选点与建立标志、外业观测、成果检核与数据处理等阶段。
1)GPS网的技术设计
GPS网的技术设计是一项基础性的工作。
这项工作应根据网的用途和用户的要求来进行,其主要内容包括精度指标的确定和网的图形设计等。
①GPS测量的精度指标
精度指标的确定取决于网的用途,设计时应根据用户的实际需要和可以实现的设备条件,恰当地确定GPS网的精度等级。
精度指标通常以网中相邻点之间的距离误差来表示。
②网的图形设计
前已述及,略。
2)选点与建立标志
由于GPS测量观测站之间不要求通视,而且网形结构灵活,故选点工作远较常规大地测量简便;并且省去了建立高标的费用,降低了成本。
但GPS测量又有其自身的特点,因此选点时,应满足以下要求:
点位应选在交通方便、易于安置接收设备的地方,且视野开阔,以便于同常规地面控制网的联测;GPS点应避开对电磁波接收有强烈吸收、反射等干扰影响的金属和其它障碍物体,如高压线、电台电视台、高层建筑、大范围水面等。
点位选定后,应按要求埋置标石,以便保存。
最后,应绘制点之记、测站环视图和GPS网选点图,作为提交的选点技术资料。
3)外业观测
外业观测是指利用GPS接收机采集来自GPS卫星的电磁波信号,其作业过程大致可分为天线安置、接收机操作和观测记录。
外业观测应严格按照技术设计时所拟定的观测计划进行实施,只有这样,才能协调好外业观测的进程,提高工作效率,保证测量成果的精度。
为了顺利地完成观测任务,在外业观测之前,还必须对所选定的接收设备进行严格的检验。
天线的妥善安置是实现精密定位的重要条件之一,其具体内容包括:
对中、整平、定向并量取天线高。
接收机操作的具体方法步骤,详见仪器使用说明书。
实际上,目前GPS接收机的自动化程度相当高,一般仅需按动若干功能键,就能顺利地自动完成测量工作;并且每做一步工作,显示屏上均有提示,大大简化了外业操作工作,降低了劳动强度。
观测记录的形式一般有两种:
一种由接收机自动形成,并保存在机载存储器中,供随时调用和处理,这部分内容主要包括接收到的卫星信号、实时定位结果及接收机本身的有关信息。
另一种是测量手簿,由操作员随时填写,其中包括观测时的气象元素等其它有关信息。
观测记录是GPS定位的原始数据,也是进行后续数据处理的唯一依据,必须妥善保管。
(3)成果检核与数据处理
观测成果的外业检核是确保外业观测质量,实现预期定位精度的重要环节。
所以,当观测任务结束后,必须在测区及时对外业观测数据进行严格的检核;并根据情况采取淘汰或必要的重测、补测措施。
只有按照《规范》要求,对各项检核内容严格检查,确保准确无误,才能进行后续的平差计算和数据处理。
前已叙及,GPS测量采用连续同步观测的方法,一般15秒钟自动记录一组数据,其数据之多、信息量之大是常规测量方法无法相比的;同时,采用的数学模型、算法等形式多样,数据处理的过程相当复杂。
在实际工作中,借助于电子计算机,使得数据处理工作的自动化达到了相当高的程度,这也是GPS能够被广泛使用的重要原因之一。
2、实训练习
实训练习六四等水准测量
(1)目的与要求
1)掌握四等水准测量的观测、记录和计算方法。
2)掌握水准测量的闭合差调整及求出待定点的高程。
(2)计划与设备
1)实验时数安排3学时,实验小组由4~5人组成。
2)实验设备每组为水准仪一台,水准尺2根,尺垫2个,记录板1块,测伞1把。
3)实验场地选择一条闭合水准路线,中间设置三个坚固点A、B、C作为水准点,以A点为已知高程点假定高程为10.000m。
由A点出发,测定B、C点高程,并测回到A点,组成闭合水准路线。
对闭合差进行调整,求出待定点高程。
记录计算在实验报告八,每人上交一份实验报告。
(3)方法与步骤
1)从已知点A出发,固定点A、B、C中间设置若干个转点。
2)每测站观测程序为:
①后视黑面尺,长水准器气泡居中,读中、下、上丝读数。
②前视黑面尺,长水准器气泡居中,读中、下、上丝读数,
③前视红面尺,长水准器气泡居中,读中丝读数,
④后视红面尺,长水准器气泡居中,读中丝读数。
3)每测站各读数按四等水准表格记录;计算和校核计算要求如下:
①视线长≤100m。
②前、后视距差d≤±5m。
③红、黑面读数差≤±3mm。
④h黑—h红≤±5mm。
⑤视距差累计值∑d≤±10m。
4)注意事项
①每测站观测完毕,要立即进行计算和校核,符合要求后方可搬站。
否则,需要重测。
②本站的∑d接近10m时,下一站要调整前、后视距,使之减少,但一次不超过5m。
实验报告八四等水准测量
日期班组姓名
测站编号
后尺
下丝
前尺
下丝
方向及尺号
水准尺读数
K+黑减红
平均高差h
备注
上丝
上丝
后视距
前视距
黑面
红面
视距差d
∑d
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
后
前
后-前
校核
∑后视
∑后
∑h
∑前视
∑前
∑后+∑前
后-前
四等水准测量成果计算表
点号
距离(km)
测站数N
高差(m)
改正数(m)
改正高差(m)
高程(m)
备注
∑
辅助计算
 升级会员
升级会员 