第九章 机械与人一.docx
《第九章 机械与人一.docx》由会员分享,可在线阅读,更多相关《第九章 机械与人一.docx(19页珍藏版)》请在冰豆网上搜索。
第九章机械与人一
第九章机械与人
(一)杠杆与滑轮
要点1、杠杆力臂的画法
关键题:
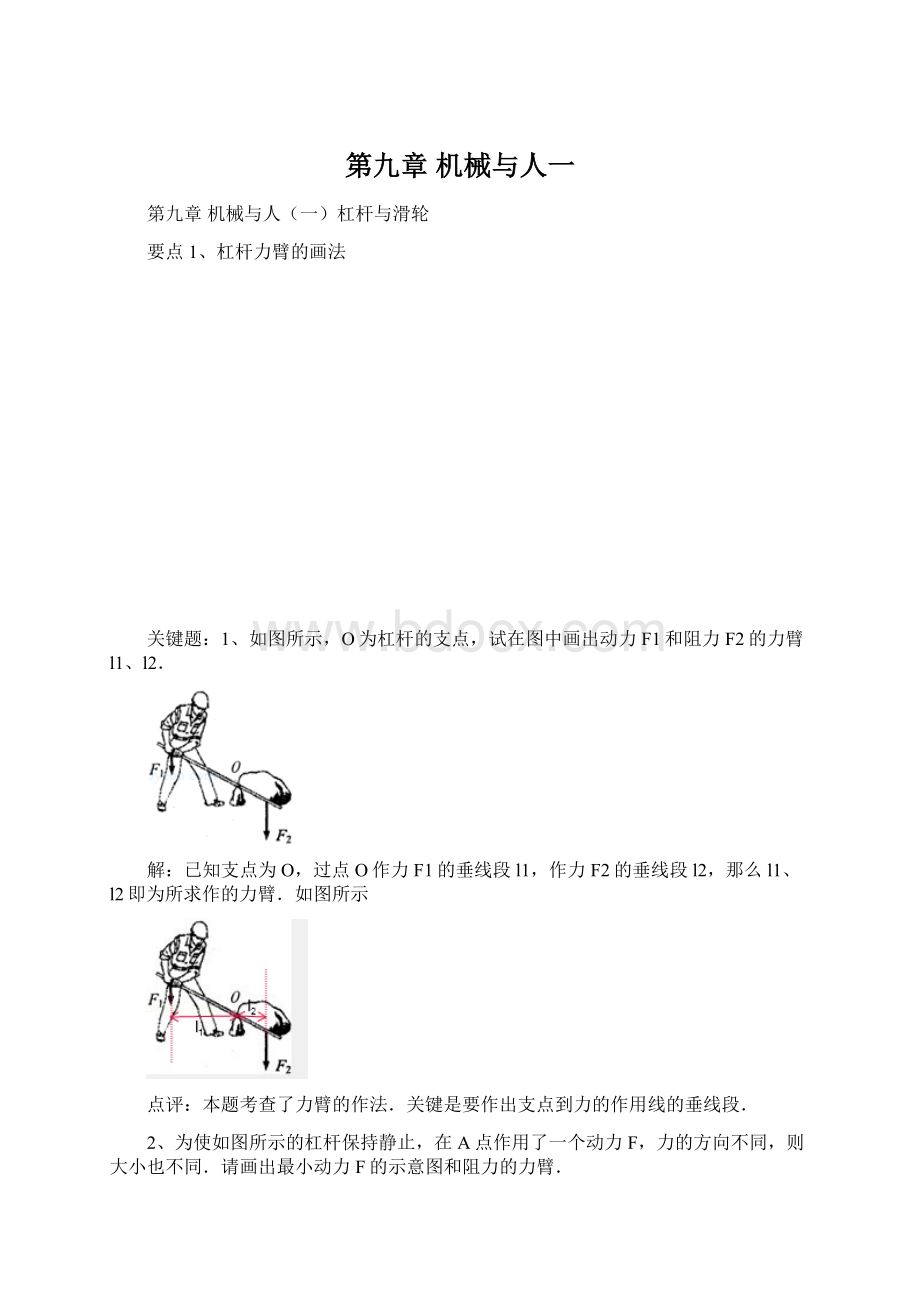
1、如图所示,O为杠杆的支点,试在图中画出动力F1和阻力F2的力臂l1、l2.
解:
已知支点为O,过点O作力F1的垂线段l1,作力F2的垂线段l2,那么l1、l2即为所求作的力臂.如图所示
点评:
本题考查了力臂的作法.关键是要作出支点到力的作用线的垂线段.
2、为使如图所示的杠杆保持静止,在A点作用了一个动力F,力的方向不同,则大小也不同.请画出最小动力F的示意图和阻力的力臂.
解:
(1)由图可见,连接OB就是最长的动力臂,根据杠杆平衡的条件,要使杠杆平衡动力方向向上,据此可画出最小的动力F1,如下图:
(2)重物的重力为阻力,则O到重力作用点的垂线段就是阻力臂,用L2表示,如下图:
点评:
要做出杠杆中的最小动力,可以按照以下几个步骤进行:
①确定杠杆中的支点和动力作用点的位置;
②连接支点与动力作用点,得到最长的线段;
③经过动力作用点做出与该线段垂直的直线;
④根据杠杆平衡原理,确定出使杠杆平衡的动力方向.
3、如图所示,为使杠杆在水平位置平衡,力臂已经画出,请你做出动力F1的力的作用线.
解:
从杠杆的转轴到力的作用线的垂直距离,是力的力臂.现在已知力臂,只要作力臂的垂线即可得力的作用线,如图所示.
点评:
力臂是初中教学的重要内容,应注意总结作力臂的方法及步骤.
对点练:
1、如图所示,是羊角锤拔钉示意图,请在图上画出动力F1的力臂和阻力F2的示意图.
解:
过钉子与物体的接触点作竖直向下的力,即阻力F2;
然后过支点O作垂直于F1作用线的垂线段即L1.图示如下:
点评:
会确物体受力的方向,会用力的示意图表示物体受力情况,知道力臂的正确画法,并且能够画出正确的力臂.
2、如图所示,O为杠杆的支点,B为阻力的作用点,画出:
(1)阻力的力臂;
(2)使杠杆平衡,在A点作用的最小动力F的示意图.
解:
(1)重力为阻力,则O到重力作用点的垂线段就是阻力臂;
(2)连接OA就是最长的动力臂,根据杠杆平衡的条件,要使杠杆平衡动力方向向上,据此可画出最小的动力.如图:
点评:
要做出杠杆中的最小动力,可以按照以下几个步骤进行
1、确定杠杆中的支点和动力作用点的位置
2、连接支点与动力作用点,得到最长的线段
3、经过动力作用点做出与该线段垂直的直线
根据杠杆平衡原理,确定出使杠杆平衡的动力方向.
3、如图所示,请画出开瓶器所受动力F1的力臂L1和所受阻力F2的示意图.
解:
如图所示
点评:
会找出杠杆的支点、动力和阻力,会根据动力臂的画法作图.
4、如图所示的剪刀就是杠杆.请画出这把剪刀的动力F1的力臂l1,和这根杠杆上B点所受阻力F2的大致方向.
解:
剪刀的O为支点,过支点到F1的作用线距离即为力臂L1,B点处产生阻力,方向竖直向上.如图所示:
点评:
本题考查杠杆的五要素和力臂的画法,会找出支点、动力和阻力,力臂是作出支点到力的作用线的垂线段.
5、如图所示,动力F的力臂是( )
A、ODB、OCC、OBD、DB
选A.
点评:
会根据力臂的画法正确画出相应力的力臂.
要点2:
实验探究:
探究杠杆的平衡条件
关键题:
、在探究“杠杆平衡条件”的实验中:
(1)某同学将杠杆悬挂起来,发现杠杆的右端低,左端高,他应该将杠杆两端的平衡螺母向 调节,使杠杆在 位置平衡.
(2)在杠杆两端挂钩码,不断改变动力或动力臂的大小,调节阻力或阻力臂的大小,使杠杆在原来的位置重新平衡,记录数据如下表:
实验次序
动力F1/N
动力臂L1/cm
阻力F2/N
阻力臂L2/cm
1
2.0
5
1.0
10
2
2.0
10
2.0
10
3
3.0
10
2.0
15
根据表中的数据你得出杠杆的平衡条件是:
.
(3)根据第2次实验数据有同学得出杠杆的平衡条件是:
动力+动力臂=阻力+阻力臂.他得出此错误结论的原因是:
.
答案:
(1)左、水平位置、
(2)F1L1=F2L2(动力×动力臂=阻力×阻力臂)、
(3)将不同的物理量进行了加法运算.
点评:
此题考查杠杆的平衡条件实验,要对实验过程有所了解.同时要知道杠杆平衡条件公式的推导.
2、在探究“杠杆的平衡条件”实验中,有甲、乙两位同学作出了如下猜想:
甲同学:
动力/动力臂=阻力/阻力臂乙同学:
动力×动力臂=阻力×阻力臂.
为了验证以上两种猜想是否正确,两位同学采用了如图所示的实验装置来进行实验和收集证据,并设计了如下的实验方案:
A.按图中装置安装器材,该装置中平衡螺母的作用是调节杠杆在 位置平衡.
B.在没有挂钩码时,发现杠杆右端下倾,可将右端螺母向 (左/右)边转动,实验时使杠杆在水平位置平衡,这样做的目的是 .
C.将钩码(每个钩码的质量均为50g)分别挂在杠杆的两边并移动其悬挂的位置,重新将杠杆调节至水平位置平衡.
D.改变悬挂的钩码个数,并移动其,悬挂的位置,使杠杆又在水平位置平衡.
实验序号
动力F1/N
动力臂l1/cm
阻力F2/N
阻力臂l2/cm
1
0.5
5.42
2.0
1.36
2
1.0
4.00
3
1.5
2.60
1.0
3.90
并将每次实验测得的数据都记录在表格中,那么:
(1)补全上述步骤中的空格,并在记录数据的表格中,根据实验装置右边的放大图补充漏掉的两空(g=10N/kg).
(2)在实验中,当杠杆处于水平位置平衡时,杠杆的重心在图中的 点.
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法一般要做三次,得到三组数据并进行分析结论,这样做的目的是 .
(4)综上所述,由此可得出的结论是:
F1•l1= (填写字母).
答案为:
水平;左;便于力臂的测量.
(1)答案为:
实验序号
动力F1/N
动力臂l1/cm
阻力F2/N
阻力臂l2/cm
1
0.5
5.42
2.0
1.36
2
1.0
4.00
1.5
2.65
3
1.5
2.60
1.0
3.90
(2)答案为:
O.(3)答案为:
得到普遍性的规律.(4)答案为:
F2•l2.
点评:
此题是探究杠杆平衡条件的实验,在此实验中要知道使杠杆在水平位置平衡为了便于测量力臂.为使实验结论具有普遍性的规律,需要多测几组数据.并且考查了杠杆的平衡条件,F1•l1=F2•l2.
对点练:
1、在探究“杠杆平衡条件”的实验中,杠杆上每格等距:
(1)实验前没挂钩码时,发现杠杆左端上翘,应将左端平衡螺母向 旋一些(选填“左”或“右”),使杠杆在 位置平衡.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能平衡,但采用这种方式是不妥当的.这主要是因为
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第 格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以平衡.
答案为:
(1)左、水平;
(2)D;(3)2.
点评:
本题考查调节平衡螺母的作用、杠杆实验时动力和阻力的实验要求及根据杠杆平衡条件计算.
2、在探究“杠杆的平衡条件”实验中,所用的实验器材有杠杆、支架、刻度尺、细线、质量相同的钩码若干.
(1)将杠杆装在支架上,发现杠杆右端下沉,如果将杠杆右侧的平衡螺母向左调到头了,杠杆右端仍下沉,此时应将杠杆左侧的平衡螺母向 调,直到杠杆在水平位置平衡为止.
(2)某同学进行正确的实验操作后,得到的数据为F1=6N、l1=20cm、F2=4N和l2=30cm.该同学根据这些数据能否得出探究结论?
.理由是:
.
(3)使杠杆在倾斜一定角度的位置做实验,也能得出杠杆平衡条件.这种实验方案与杠杆在水平位置做实验的方案相比较,你认为前一种还是后一种实验方案好并说明理由:
.
(4)如图所示,杠杆在水平位置平衡.如果在两侧钩码下再各挂一个相同的钩码,则杠杆 右 端将下沉.
答案为:
(1)左;
(2)不能得出探究结论;因为一次实验获得的数据有偶然性,不能反映普遍规律;
(3)杠杆在水平位置的实验方案好;理由:
便于测量力臂;
(4)右.
点评:
考查杠杆的平衡条件及应用,本题中涉及实验到的注意事项很特殊,多次测量的目的不是为了减小误差而是为了总结普遍规律;
对于已经平衡的杠杆,改变条件后判断杠杆是否还能保持平衡,有两种方法:
一是按力和力臂的乘积;二是按比例的方法.
要点3:
杠杆的平衡条件及其应用
关键题:
1、如图所示,杆秤秤砣的质量为0.1千克,杆秤的质量忽略不计.若杆秤水平静止时,被测物和秤砣到秤纽的距离分别为0.05米、0.2米,则被测物的质量为 千克.若秤砣有缺损时,则杆秤所示的质量值 被测物的真实质量值(选填“小于”、“等于”或“大于”).
答案为:
0.4,大于.
点评:
本题考查了学生对杠杆的平衡条件的掌握和运用,找出力臂大小是本题的关键.
2、如图所示的常用工具中,属于费力杠杆的是( )
选B.
点评:
本题的解题关键是通过观察实物,体会支点的位置,从而进一步判断出动力臂与阻力臂的长度关系.
3、如图所示的杠杆是平衡的.若如图乙所示,在支点两侧的物体下方分别加挂一个等重的物体,杠杆( )
A、仍能平衡B、不能平衡,A端上升C、不能平衡,B端上升D、无法判断
选B.
点评:
杠杆是否平衡,取决于力和力臂的乘积是否相等,不能只看力或力臂.
对点练:
1、两个小孩坐在跷跷板上,当跷跷板处于平衡时( )
A、两个小孩的重力一定相等B、两个小孩到支点的距离一定相等
C、轻的小孩离支点近一些D、重的小孩离支点近一些
选D.
点评:
这是一个联系生活实际的例子,要使跷跷板平衡,必须满足杠杆原理.
2、如图所示,绳子OO′悬吊着质量忽略不计的杆,在杆的a点挂上重物G,在O右侧某点b处挂上钩码.重物G的质量及a到O的距离不变,要使杆保持水平,b点挂的钩码个数(各个钩码质量相同)和b到O的距离的关系是图中哪一幅( )
选B.
点评:
本题属于杠杆平衡条件的简单应用:
动力与动力臂不变时,阻力与阻力臂成反比;阻力与阻力臂不变时,动力与动力臂成反比.处理此类题目时,要找出杠杠的五要素,并确定哪些要素不会发生变化.
3、如图所示,起瓶器开启瓶盖时,可看作是( )
A、以B为支点的费力杠杆B、以B为支点的省力杠杆
C、以A为支点的费力杠杆D、以A为支点的省力杠杆
选D.
点评:
本题的解题关键是通过观察实物,体会支点的位置,从而进一步判断出动力臂与阻力臂的长度关系.
4、图中所示的四种情景中,所使用的杠杆属于费力杠杆的是( )
选D.
点评:
该题考查了学生对物理模型的抽象、分析能力.判断杠杆的类型可结合生活经验和动力臂与阻力臂的大小关系来判断.
5、如图所示,杠杆在水平位置处于平衡状态,杠杆上每格均匀等距,每个钩码都相同.下列四项操作中,会使杠杆右端下倾的是( )
①将杠杆两侧的钩码同时各向外移动一小格;②将杠杆两侧的钩码同时各向内移动一小格;
③在杠杆的两侧同时各减掉一个钩码;④在杠杆的两侧钩码下同时各加挂一个相同的钩码.
A、①③B、②③C、②④D、①④
选C.
点评:
要使杠杆平衡,作用在杠杆上的两个力(用力点、支点和阻力点)的大小跟它们的力臂成反比.动力×动力臂=阻力×阻力臂,用代数式表示为F1•L1=F2•L2.式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂.从上式可看出,欲使杠杆达到平衡,动力臂是阻力臂的几倍,动力就是阻力的几分之一.
要点4:
实验探究:
滑轮的特点
关键题:
(2009•防城港)如图是小海同学“研究定滑轮和动滑轮特点”的实验装置.他按图示提起钩码时注意保持测力计匀速移动,分别测得一组数据如下表所示
请你分析:
(1)比较测力计示数的大小,可知:
使用动滑轮的好处是 ;
(2)比较测力计拉力的方向,可知:
使用定滑轮的好处是 ;
(3)把钩码升高相同的高度,比较乙和丙实验测力计移动的距离,可知:
使用动滑轮 ;
(4)在提升重物的过程中,如果要同时兼顾定滑轮和动滑轮的特点,则应选择 ;
(5)进一步分析实验数据,你还发现什么规律?
(说明分析或计算什么,得到什么结论.写出一个结论即可)
答案为:
能省力;可以改变用力的方向;费距离;滑轮组.
点评:
本题考查了学生从表格中的数据得出结论的能力,认识到使用定滑轮和动滑轮的特点,每种机械都有优点和缺点,同时通过计算认识到使用机械不能省功的道理.
对点练:
1、使用定滑轮 省力,但是 改变力的力向(填“能”或“不能”).定滑轮实质上是一个 杠杆,请在图中标出支点、动力、动力臂、阻力和阻力臂.
解:
使用定滑轮不能省力,但能改变力的方向;由于定滑轮的动力臂等于阻力臂,因此定滑轮属于等臂杠杆;定滑轮的五要素如图所示
点评:
(1)本题考查了力臂的基本画法,力臂是支点到力作用线的距离,是一条垂线段;
(2)考查了定滑轮的实质:
定滑轮实质是一个等臂杠杆,不能省力,但能改变力的方向.
2、小明同学按照下图所示装置对动滑轮特点进行了探究,记录的数据如下表:
通过分析数据.她觉得与“使用动滑轮能省一半的力”的结论偏差较大.你一定也做过这样的实验,回想你的实验经历,回答下列问题:
该实验中出现这样结果的主要原因是 和 .在该实验时还应注意 .
答案为:
动滑轮有自重;滑轮和绳子间有摩擦;竖直匀速向上提.
点评:
有许多物理中的结论是建立在理想模型条件下得出的,在实际的应用中会出现与结论不一致,是受到了客观条件的影响,而不能说结论有错误.
3、如图,用动滑轮提起重物的示意图,请在图中作出反映动滑轮实质的杠杆示意图.
解:
如图:
点O是支点,OA是阻力臂,OB是动力臂,且OB=2OA.
点评:
本题考查了动滑轮的实质:
动滑轮实质是一个动力臂为阻力臂二倍的杠杆,故省一半力.
4、如图用定滑轮拉同一重物G,沿三个不同方向,用的拉力( )
A、F1较大B、F2较大C、F3较大D、F1、F2、F3一样大
选D.
点评:
本题主要考查学生对定滑轮工作特点的了解和掌握,是一道基础题.
5、在图中利用了动滑轮的是( )
选D.
点评:
动滑轮会随物体一起运动,定滑轮不随物体运动.
6、在探究定滑轮和动滑轮的省力特点时,某同学做出如图所示实验.
(1)在甲图中,该同学分别用力F1、F2、F3使物体匀速上升,则F1、F2、F3的大小关系是 .
(2)在乙图中,该同学也分别用力F1、F2、F3使物体匀速上升,则F1、F2、F3的大小关系是 .
答案为:
(1)F1=F2=F3;
(2)F1<F2<F3.
点评:
本题考查了定滑轮和动滑轮的特点.由本题的第
(2)小题知,在使用动滑轮时,只有当竖直向上拉绳子时,拉力才是物重的一半.
要点5:
滑轮组的组装和计算
关键题:
1、图中,站在地面上的小华借助滑轮组匀速提升重物,请画出最省力的绕线方法.
答案为:
.
点评:
此题考查了滑轮组的组装.滑轮组的组装有两种方法,从定滑轮绕起或从动滑轮绕起.从动滑轮开始绕,承担物重的绳子段数多.
对点练:
1、站在地面上的人用如图所示的滑轮组,把重物沿竖直方向匀速提高3m,所用的时间是6s,人拉绳的拉力F是300N.(滑轮重与摩擦不计)
(1)请根据题意在图中画出最省力的绳的绕法;
(2)所提物体有多重?
(3)绳子末端要拉下几米?
答:
(1)如图;
(2)所提物体的重为600N;(3)绳子末端要拉力的距离为6m.
点评:
滑轮组绕绳时,不仅要考虑到省力,同时还要看对最终绳子末端的拉力方向是否有要求;对确滑轮组的省力与费距离是相对的,这一点非常重要.
2、借助简单机械将重物提升,若不计滑轮重量及摩擦,以下装置最省力的是( )
选D.
点评:
本题的关键有二:
一是承担物重的绳子股数的确定(直接从动滑轮上引出的绳子股数),二是利用好不计滑轮重、绳重和摩擦时,拉力和物重的关系F=
G.
3、有一个人站在地面上用如图所示的滑轮组提起重物,已知每一个滑轮重375N(不计绳重和一切摩擦).
(1)当重物为1500N,绳端拉力是多少?
(2)当重物在20s内匀速上升2m时,绳自由端移动的速度是多少?
答:
(1)当重物为1500N,绳端拉力是625N.
(2)当重物在20s内匀速上升2m时,绳自由端移动的速度是0.3m/s.点评:
能否用分割法准确判断承担物重的绳子股数n是本题的解题关键所在.
课后作业
1、关于杠杆,下列说法正确的是( )
A、只有直的硬棒才是杠杆B、使用杠杆一定省力
C、力臂就是支点到力的作用点的连线D、既省力又省距离的杠杆是不存在的
选D.
点评:
熟知并正确理解杠杆的定义和五个要素,是我们学习杠杆最基本的要求.
2、杠杆处于平衡状态时,下列说法中正确的是( )
A、动力和阻力的大小一定相同B、动力臂一定等于阻力臂
C、若动力为阻力的1/2,则动力臂为阻力臂的2倍D、支点一定在动力作用点和阻力作用点之间
选C.
点评:
理解杠杆平衡条件,知道杠杆是否平衡取决于动力和动力臂的乘积与阻力和阻力臂乘积是否相等.
3、如图所示的剪刀中,要剪开较硬的物体,使用哪种最合适?
( )
A、
B、
C、
D、
选D.
点评:
剪刀是生活中一种特殊杠杆,要根据需要选择最合适的.手柄长的剪刀省力,刀口长的剪刀省距离.
4、如图是一种拉杆式旅行箱的示意图,使用时相当于一个 杠杆(选填“省力”或“费力”),若箱的重量为100N,动力臂是阻力臂的4倍,要使该杠杆平衡,则竖直向上的拉力F为 N.
答案为:
省力,25.
点评:
由杠杆的平衡条件:
F1l1=F2l2可知,
=
,即力和力臂成反比.
5、今天,小明是学校的升旗手,他将一面国旗在国歌声中匀速升到旗杆顶端.请问:
(1)旗杆顶端装有定滑轮,利用它来升国旗,目的是改变 ;
(2)小明用25N的力把国旗沿竖直方向匀速拉动上升8m,不计摩擦国旗的重力是 N;
(3)小明体重600N,每只鞋与水平地面的接触面积约为200cm2.小明在国旗下敬礼时,对地的压强是 Pa.
答案为:
(1)力的方向;
(2)156.8;(3)1.5×104.
点评:
本题考查了重力、压力、压强和功的计算,关键是公式及其变形的灵活运用,要知道在水平面上物体对水平面的压力等于物体自身的重力,解题过程中要注意单位的换算.还要注意此时给出的200cm2是每只脚与水平地面接触面积,不要把它当成双脚站立时与水平地面接触面积.
6、按照题目要求作图:
(1)图甲中物体静止在水平桌面上,画出它所受力的示意图.
(2)图乙中,为使杠杆OA保持静止,画出在A点所加最小力F1的示意图和阻力F2的力臂l2.
解;
(1)物体受到重力和支持力作用,重力从重心竖直向下画,支持力从重心竖直向上画,如图:
(2)过A点垂直OA杆斜向上作出最小的力F1,从O点向力F2的作用线作垂线,用大括号标出,标上字母符号L2,如图:
点评:
画受力示意图是用一条带箭头的线段表示力,线段的长度表示力的大小,箭头表示力的方向,起点或终点表示力的作用点;
杠杆平衡时,若力与力臂的乘积一定,支点到力的作用点的距离为力臂,力臂最大,作用力将最小;
磁感线一般从N极指向S极,或从N极指向无限远处,或从无限远处指向S极.
7、在探究“杠杆平衡条件”的实验中,杠杆上每格等距:
(1)实验前没挂钩码时,发现杠杆左端上翘,应将左端平衡螺母向 旋一些(选填“左”或“右”),使杠杆在 位置平衡.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能平衡,但采用这种方式是不妥当的.这主要是因
为
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第 格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以平衡.
答案为:
(1)左、水平;
(2)D;(3)2.
点评:
本题考查调节平衡螺母的作用、杠杆实验时动力和阻力的实验要求及根据杠杆平衡条件计算.
 升级会员
升级会员 