PLC课程设计 机械手.docx
《PLC课程设计 机械手.docx》由会员分享,可在线阅读,更多相关《PLC课程设计 机械手.docx(14页珍藏版)》请在冰豆网上搜索。
PLC课程设计机械手
1机械手部分
设计要求
机械手
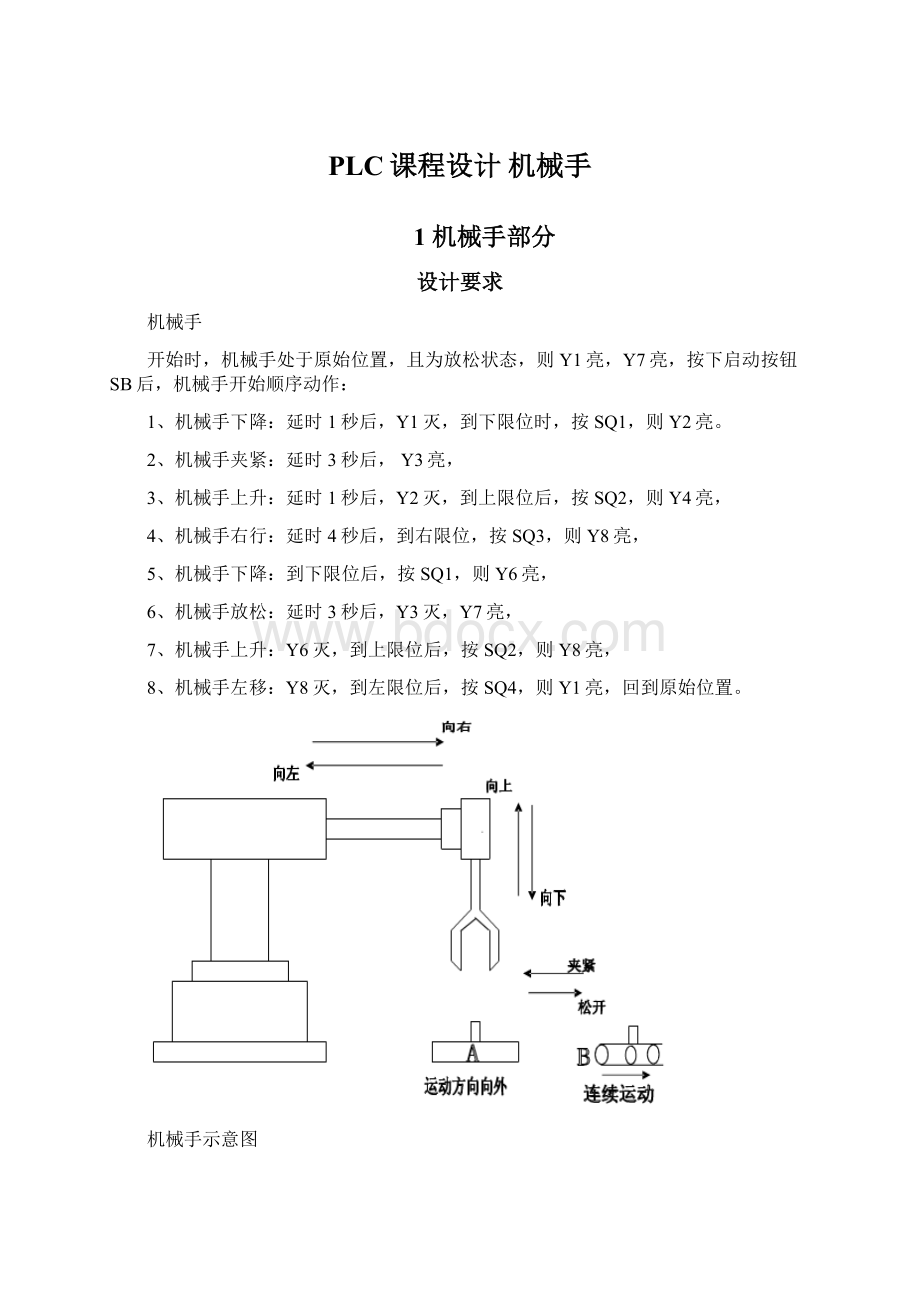
开始时,机械手处于原始位置,且为放松状态,则Y1亮,Y7亮,按下启动按钮SB后,机械手开始顺序动作:
1、机械手下降:
延时1秒后,Y1灭,到下限位时,按SQ1,则Y2亮。
2、机械手夹紧:
延时3秒后,Y3亮,
3、机械手上升:
延时1秒后,Y2灭,到上限位后,按SQ2,则Y4亮,
4、机械手右行:
延时4秒后,到右限位,按SQ3,则Y8亮,
5、机械手下降:
到下限位后,按SQ1,则Y6亮,
6、机械手放松:
延时3秒后,Y3灭,Y7亮,
7、机械手上升:
Y6灭,到上限位后,按SQ2,则Y8亮,
8、机械手左移:
Y8灭,到左限位后,按SQ4,则Y1亮,回到原始位置。
机械手示意图
设计目的
(1)通过对机械手的设计,加深了对PLC的了解认识。
(2)熟悉了PLC编程的工作原理、规则、技巧和方法等。
(3)将书本所学运用于模型,实现知识与实践的统一。
工作原理
PLC是采用“循环扫描”的工作方式,从第一条指令开始逐条顺序执行用户程序,直至遇到结束符后又返回第一条指令,如此周而复始不断循环,每一个循环成为一个扫描周期。
机械手原理解析
主流程图
系统运行过程分析
机械手示意图
机械手的初始位置在原点时,指示灯Y1和Y7亮,表示未动作时机械手处于上限位且为放松状态。
当按下启动按钮SB以后,机械手依次完成:
下降、夹紧、上升、右移、下降、放松、左移、原点,从而实现机械手一个周期的动作。
机械手的下降、上升、左移、右移的动作转换是靠限位开关来控制的,而夹紧、放松动作的转换是有时间继电器来控制的。
按下启动按钮SB以后,处于原点位置的机械手将下降,当降至下行限位开关SQ1处时,指示灯Y2亮,说明机械手已经到达下限位处,延时3秒后夹紧指示灯亮,表明机械手已经抓紧物品,当上升至上限位开关SQ2处后再右移,当右移至右限位开关SQ3处时右限位指示灯Y8亮,随后下降至下限位处,指示灯Y6亮,延时3秒后Y3灭,Y7亮,说明此时物品已经放到指定位置,机械手处于放松状态,后上升至上限为处,指示灯Y8亮,最后左移至原点处,Y1亮。
之后重复上述过程,从而实现机械手循环动作。
输入输出地址分配表
输入信号
输出信号
名称
代号
输入点编号
名称
代号
输出点编号
启动按钮
SB
I0.0
原点指示灯
Y1
Q0.0
下限位开关
SQ1
I0.1
下限位指示灯
(左侧)
Y2
Q0.1
上限位开关
SQ2
I0.2
夹紧指示灯
Y3
Q0.2
右限位开关
SQ3
I0.3
上限位指示灯
(左侧)
Y4
Q0.3
左限位开关
SQ4
I0.4
右限位指示灯
Y5
Q0.4
下限位指示灯
(右侧)
Y6
Q0.5
放松位指示灯
(左侧)
Y7
Q0.6
上限位指示灯
(右侧)
Y8
Q0.7
设计内容
PLC接线形式
PLC接线图
端口I0.0为接入系统开关的传送信号,SQ1、SQ2、SQ3、SQ4为各个限位开关,依次接I0.1、I0.2、I0.3、I0.4端口,Y1、Y2、Y3、Y4、Y5、Y6、Y7、Y8为个限位指示灯,依次接Q0.0、Q0.1、Q0.2、Q0.3、Q0.4、Q0.5、Q0.6、Q0.7端口,作为输出信号。
设计梯形图及功能分析
网络1中,通过开关I1.0,中间继电器M0.0和M0.2的常闭触点,保证了Q0.0和Q0.6在初始状态得电,即指示灯Y1和Y7亮。
网络2、3中,按下启动按钮SB,I0.0的常开触点闭合,继电器线圈M2.0得电,将I0.0自锁,同时定时器T37开始计时,线圈M1.1得电。
网络4中,当T37定时1秒后,Q0.0被立即复位,灯Y1熄灭。
此时到达下限位,按下按钮SQ1,I0.1的常开触点闭合,线圈Q0.1得电,灯Y2亮,M0.2、M0.3得电,I0.1自锁,定时器T38开始计时。
网络5、6中,T38计时3秒后,线圈Q0.2得电,灯Y3亮,同时定时器T39开始计时,M0.0得电。
T39计时1秒后,其常开触点闭合,线圈Q0.1被立即复位,灯Y2熄灭。
这时到达上限位,按下按钮SQ2,I0.2的常开触点闭合,线圈Q0.3得电,灯Y4亮,线圈M1.2得电,将I0.2自锁,定时器T40和T44开始计时。
网络7、8、9中,T44计时2秒后,Q0.3被立即复位,灯Y4熄灭。
T40计时4秒后,到达右限位,按下按钮SQ3,I0.3的常开触点闭合,M0.1和M0.4得电,Q0.7得电,灯Y8亮,I0.3被自锁。
此时到达下限位,按下按钮SQ1,I0.1的常开触点闭合,Q0.5得电,灯Y1亮,M0.6得电将I0.1自锁,定时器开始计时。
网络10、11中,T41定时3秒后,Q0.2被立即复位,灯Y3熄灭,Q0.6得电,灯Y7亮,定时器T42开始计时,M0.5得电。
T42定时3秒后,Q0.5被立即复位,灯Y6熄灭,此时到上限位,按下SQ2,I0.2的常开触点闭合,灯Y8亮。
网络12、13、14、15中,经延时后Y8熄灭,到达左限位后,按下SQ4,I0.4的常开触点闭合,灯Y1亮,同时Y1延时一段时间后,有网路14和15与网络4实现联系,定时器T45到时后网络4I0.5的常闭触点断开,T46到时后,网络4中I0.6的常开触点闭合,实现机械手的循环动作。
机械手语句表
改进意见
该系统应加入报警系统,确保系统在出现故障时能及时纠正。
可能出现的故障情况有:
重物超重、重物过大或过小、运输过程中重物脱离机械手等……
 升级会员
升级会员 