中考物理命题热点突破方法第十一章《简单机械》一.docx
《中考物理命题热点突破方法第十一章《简单机械》一.docx》由会员分享,可在线阅读,更多相关《中考物理命题热点突破方法第十一章《简单机械》一.docx(24页珍藏版)》请在冰豆网上搜索。
中考物理命题热点突破方法第十一章《简单机械》一
第十二章简单机械
(一)——杠杆、滑轮
中考透视明确航向
简单机械在中考中一般占2-4分,考查基础性知识,题型主要有填空、选择、作图、实验探究等.考查的知识点主要有:
杠杆的分类、力臂的画法、利用杠杆平衡条件进行计算以及应用简单机械解决实际问题.2018年中考物理的考查仍会以基础性知识的考查为主,探究性题目及考查学生技能的开放性题目会增多.
典例探究提炼技法
考点一:
杠杆的示意图
命题角度1:
力臂作图
【例1】:
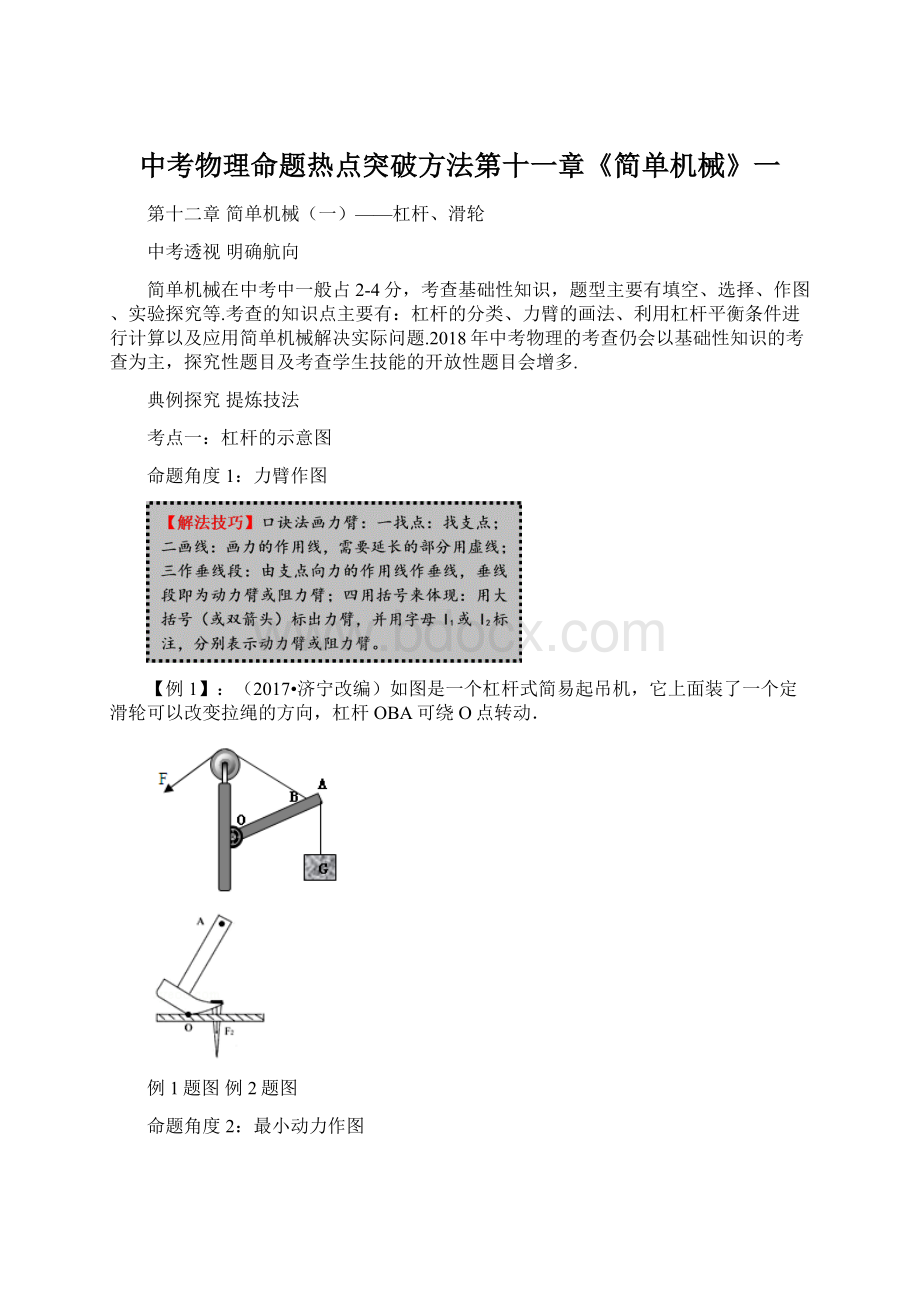
(2017•济宁改编)如图是一个杠杆式简易起吊机,它上面装了一个定滑轮可以改变拉绳的方向,杠杆OBA可绕O点转动.
例1题图例2题图
命题角度2:
最小动力作图
【例2】:
(2017•广东)如图所示,利用羊角锤撬起钉子,请你在羊角锤A点处画出所能施加最小动力F1,并画出阻力F2的阻力臂L2.
考点二:
辨别生活中的杠杆类型
【例3】:
(2017•北京)如图所示的工具中,在使用时属于费力杠杆的是( )
A.羊角锤B.核桃夹子
C.撬棒D.食品夹子
考点三:
杠杆的平衡问题
命题角度1:
杠杆的再平衡问题
【例4】:
(2017•自贡)如图所示的杠杆正处于水平平衡,若在杠杆两边的钩码下再加一个钩码(钩码的质量都相同),杠杆将( )
A.还继续处于水平平衡
B.右端上升,左端下降
C.右端下降,左端上升
D.无法确定杠杆的运动状态
例4题图例5题图
命题角度2:
杠杆的动态平衡问题
【例5】:
(2017•枣庄)如图是小明探究“杠杆平衡条件”的实验装置,实验中杠杆始终处于水平平衡状态,若在C处逐渐改变弹簧测力计拉力的方向,使其从①→②→③,则拉力的变化情况是( )
A.先变小后变大B.先变大后变小
C.逐渐变大D.逐渐变小
考点四:
滑轮
命题角度1:
滑轮的分类及工作特点
【例6】:
(2017•台州)小柯用图中装置提升重为400牛的物体,不计摩擦和滑轮自重,下列说法正确的是( )
A.两个滑轮均为定滑轮
B.人将绳子拉过1m,物体也上升1m
C.物体匀速上升时,人对绳子的拉力为200N
D.使用该装置不能省力,但能改变力的方向
命题角度2:
滑轮组绕线作图
【例7】:
(2017春•鞍山期末)利用图中滑轮组拉动物体沿水平向左运动,请画出最省力滑轮组绕线方法.
考点五:
探究杠杆的平衡条件
【例8】:
(2017•攀枝花)在“探究杠杆平衡条件的实验”中:
(1)如图甲所示,杠杆左端下沉,则应将平衡螺母向 (选填“左”或“右”)调节,直到杠杆在水平位置平衡,在水平位置平衡的目的是便于测量 .
(2)如图乙所示,杠杆上的刻度均匀,在A点挂4个钩码,要使杠杆在水平位置平衡,应在B点挂 个相同的钩码;当杠杆平衡后,将A、B两点下方所挂的钩码同时朝远离支点O的方向各移动一小格,则杠杆的 (选填“左”或“右”)端将下沉.
(3)如图丙所示,在A点挂一定数量的钩码,用弹簧测力计在C点斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡时,弹簧测力计的示数如图丙所示,已知每个钩码重0.4N,则在A点应挂 个钩码.
对点实战诊断达标
1.(2017•德州)如图所示的四种情景中,使用的工具属于费力杠杆的是( )
A.食品夹B.裁纸刀
C.托盘天平D.瓶盖起子
2.(2017•舟山)如图是一种切甘蔗用的铡刀示意图.下列有关说法正确的是( )
A.刀刃很薄可以增大压力
B.铡刀实质上是一种费力杠杆
C.甘蔗放在a点比b点更易被切断
D.手沿F1方向用力比沿F2方向更省力
第2题图第3题图
3.(2017•日照)工人师傅用独轮车搬运砖块,车和砖块所受的重力G=1200N,有关尺寸如图所示,工人师傅推车时,人手向上的力F的大小是( )
A.300NB.400NC.600ND.1200N
4.(2017•连云港)如图所示,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡,已知每个钩码的质量均为50g,若在A,B两处各加1个钩码,那么杠杆( )
A.右边向下倾斜
B.左边向下倾斜
C.仍保持水平位置平衡
D.无法确定杠杆是否平衡
第4题图第5题图
5.(2017•南通)如图,O为拉杆式旅行箱的轮轴,OA为拉杆.现在拉杆端点A处施加力F,使箱体从图中位置绕O点缓慢逆时针转至竖直位置.若力F的大小保持不变,则力F的方向应( )
A.垂直于OAB.竖直向上
C.沿OA向上D.水平向左
6.(2017•烟台)踮脚是一项很好的有氧运动(如图),它简单易学,不受场地的限制,深受广大群众的喜爱,踮脚运动的基本模型是杠杆,下列分析正确的是( )
A.脚后跟是支点,是省力杠杆
B.脚后跟是支点,是费力杠杆
C.脚掌与地面接触的地方是支点,是省力杠杆
D.脚掌与地面接触的地方是支点,是费力杠杆
7.(多选)(2017•天津)如图所示,某人用扁担担起两筐质量为m1,m2的货物,当他的肩处于O点时,扁担水平平衡,已知l1>l2,扁担和筐的重力不计.若将两筐的悬挂点向O点移近相同的距离△l,则( )
A.扁担左端向下倾斜
B.扁担右端向下倾斜
C.要使扁担恢复水平平衡需再往某侧筐中加入货物,其质量为(m2﹣m1)
D.要使扁担恢复水平平衡需再往某侧筐中加入货物,其质量为(m2﹣m1)
8.(2018•柳州)如图所示是工人提升重物的情景,若不计滑轮所受重力及摩擦力,其中最省力的是( )
AB
CD
9.(2017•杭州)小金将长为0.6米、质量可忽略不计的木棒搁在肩上,棒的后端A挂一个40N的物体,肩上支点O离后端A为0.2m,他用手压住前端B使木棒保持水平平衡,如图所示,小金的质量为50kg,则此时手压木棒的压力大小为 N,肩对木棒的支持力大小为 N,人对地面的压力大小为 N(g=10N/kg)
第9题图第10题图第11题图
10.(2017•福建)如图所示,撬起瓶盖的起瓶器是属于 杠杆(选填“省力”、“费力”或“等臂”),其支点是图中 点.
11.(2017•淮安)如图所示,在探究“杠杆平衡条件”的实验中,调节杠杆在水平位置平衡后,在A点悬挂4个钩码(每个钩码重0.5N),用调好的弹簧测力计沿竖直方向拉杠杆上的B点,使杠杆再次平衡,则弹簧测力计的示数为 N;将测力计转向图中虚线方向的过程中,始终保持杠杆平衡,则测力计的示数将 (选填“变大”、“变小”或“不变”).
12.(2017•桂林)如图所示,推走独轮车之前,需先将其撑脚抬离地面,慢慢抬起的过程中,独轮车属于 杠杆,若向上施加在车把手上的力始终与把手垂直,则这个力的大小 (选填“逐渐增大”、“逐渐变小”或“始终不变”).
第12题图第13题图第14题图
13.(2017•黔东南州)如图所示为我州某学校升旗的情景,旗杆顶装的滑轮是 滑轮,它的作用是 .
14.(2017•绥化)如图,工人利用滑轮组将200N的重物匀速向上提升到2m高的平台上,则他所用的拉力为 N,绳子自由端向下移动的距离为 m.(不计绳重、动滑轮重及摩擦)
15.(2017•济宁)小可在A端用如图所示的动滑轮匀速提起200N的水桶,若不计绳重、滑轮重及摩擦,则人拉绳子A端的动力为 N;实际测量A端的拉力为110N,不计绳重及摩擦,则滑轮重为 N.
第15题图第16题图
16.(2017•上海)如图(a)、(b)所示,分别用力F1、F2匀速提升重为10N的物体,图 中的滑轮可以看作省力杠杆;图(a)中.若不计摩擦和滑轮重力,力F1的大小为 N,物体受到合力的大小为 N.
17.(2017•海南)如图所示,图甲不计滑轮重与摩擦,匀速提升重30N的物体,弹簧测力计的示数F= N,图乙杠杆水平平衡,则A、B两物体对杠杆的拉力大小关系是FA= FB.
第17题图第18题图
18.(2017•眉山)如图所示,O为支点,L1为动力F1的力臂,请作出此杠杆的动力F1和阻力F2的示意图.
19.(2017•营口)植树时,需要挖树坑,小军把铁锹的锹面踩进坚硬的土壤里,用锹把土翻起,如图所示的是铁锹的剖面图,土壤对锹面的阻力F2的示意图已画出,请在图中找到并标出支点O,画出最小作用力F1的示意图及力臂L1.
第19题图第20题图
20.(2017春•单县期末)站在地面上的人想尽可能小的力提升水桶.请在图中画出滑轮组绳子的绕法.
20.(2017•苏州)在“探究杠杆的平衡条件”实验中:
(1)图甲中,为使杠杆在水平位置平衡,应将右端的平衡螺母向 侧调节.
(2)图乙中,杠杆恰好处于水平平衡状态,若在A处下方再挂一个钩码,则B处所挂钩码须向右移动 格,可使杠杆在水平位置再次平衡.
(3)杠杆处于图甲所示位置时,小李同学就在杠杆上挂钩码进行实验,小明认为这样操作会对实验产生以下影响:
①杠杆自身重力可能会对实验产生影响
②可能不便于测量力臂或出现力臂测量错误
③无法得出杠杆平衡条件
你认为正确的是 .
A.①②B.①③C.②③
拓展升华提升能力
22.(2017•聊城)如图所示,在“探究杠杆的平衡条件”实验中,已知杠杆上每个小格长度为2cm,当弹簧测力计在A点斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡时,下列说法正确的是( )
A.动力臂为0.08mB.此时为省力杠杆
C.弹簧测力计的示数为4ND.钩码总重为2N
第22题图第23题图
23.(2017•来宾)如图所示,体积之比为1:
2的甲、乙两个实心物块,分别挂在杠杆两端,此时杠杆恰好水平平衡,则甲、乙两个物块的密度之比为( )
A.1:
1B.1:
2C.2:
1D.4:
1
24.(2017•宜宾)指甲刀是生活中常用的小工具,如图所示,它包含三个杠杆,关于这三个杠杆的说法正确的是( )
A.一个省力杠杆,两个费力杠杆
B.一个费力杠杆,两个省力杠杆
C.三个都是省力杠杆
D.三个都是费力杠杆
第24题图第25题图
25.(2017•宁波)如图所示,用同一个动滑轮先后提升同一物体,使物体以相同的速度匀速上升相同的高度,所用的力分别是F甲和F乙,拉力做功的功率分别是P甲和P乙.若不计摩擦、动滑轮重和绳重,则F甲与F乙、P甲与P乙之间的大小关系是( )
A.F甲<F乙、P甲=P乙B.F甲>F乙、P甲>P乙
C.F甲>F乙、P甲=P乙D.F甲<F乙、P甲<P乙
26.(2017•深圳)下列图中的简单机械,不能省力但能省距离的是( )
27.(2017•黑龙江)利用如图所示的滑轮组将一个重200N的物体,匀速提高5m,不计滑轮自重、绳重及摩擦,绳子自由端施加的拉力F为 N.若实际拉力F为60N,则实际拉力F所做的功为 J.
第27题图第28题图
28.(2017•百色)如图所示,重力为50N的物体在拉力F的作用下沿水平向左匀速运动,若物体受到地面摩擦力的大小为10N,不计粗绳、滑轮的重力及细绳与滑轮的摩擦,则拉力F的大小为 N;在这个过程中,物体的机械能 (选填“变小”、“不变”或“变大”).
29.(2017•北京)实验台上有满足实验要求的器材:
弹簧测力计1个,所受重力为1N的钩码2个,带支架的杠杆1个.杠杆上相邻刻度间距离均为0.05m,刻线上下靠近杠杆边缘处均有圆形小孔,可用来挂钩码或弹簧测力计,如图所示.请利用上述实验器材,设计一个实验证明:
“杠杆在水平位置平衡时,如果动力臂L1保持不变,则F1=kF2L2”,式中F1表示动力,k是常量,F2表示阻力,L2表示阻力臂.
请写出实验步骤,画出实验数据记录表格.
30.(2017•贺州)小明用如图所示的动滑轮提升重物,将重为200N的物体A以0.1m/s的速度匀速提升了1m(不计摩擦,忽略绳、滑轮的重力)求:
(1)拉力F的大小;
(2)拉力F所做的功;(3)拉力F做功的功率.
简单机械
(一)——杠杆、滑轮
例1.解析:
从支点向动力作用线引垂线,作出动力臂,用大括号标出,标上字母L1;
从支点向阻力作用线引垂线,作出阻力臂,用大括号标出,标上字母L2;
如图:
例2.如图所示.解析:
力臂越长越省力,最长的力臂即支点与作用点的连线,然后根据力臂的画法作出垂直于力臂的作用力即可.过O点作垂直于F2的垂线即为阻力F2的力臂L2.
例3.D.解析:
A、羊角锤在使用时,动力臂大于阻力臂,属于省力杠杆;故A错误;B、核桃夹子在使用时,动力臂大于阻力臂,属于省力杠杆;故B错误;C、撬棒在使用时,动力臂大于阻力臂,属于省力杠杆;故C错误;D、食品夹子在使用时,动力臂小于阻力臂,属于费力杠杆;故D正确.
例4.C.解析:
设每个钩码的质量为m,左侧力臂为L,由杠杆的平衡条件可得:
3mgL=2mgL右,解得:
L右=
L;两端增加一个钩码后,左侧力和力臂的乘积为4mgL,右侧力和力臂的乘积为3mg×
L=4.5mgL,则右端力和力臂的乘积大,所以杠杆右端下降,左端上升,故ABD错误、C正确.
例5.A.解析:
由图知,测力计在②位置时,其动力臂等于OC,此时动力臂最长;
测力计由①→②→③的过程中动力臂先变大后变小,根据杠杆平衡条件可知,测力计的示数先变小后变大.
例6.C.解析:
A、由图可知,该装置由一个动滑轮和一个定滑轮组成,故A错误;
B、使用动滑轮时,物体上升1m,则绳子的自由端会通过2m,故B错误;
C、不计摩擦和滑动自重,使用动滑轮能省一半的力,物体的重力为400N,则拉力为200N,故C正确;D、使用动滑轮能省力,使用定滑轮能改变力的方向,故D错误.
例7.如图所示。
解析:
只有一个动滑轮,要求滑轮组最省力,则绳子先系在动滑轮的固定挂钩上,然后绕过左边的定滑轮,再绕过动滑轮,此时动滑轮上的有效股数为3.
例8.
(1)右;力臂;
(2)6;右;(3)2.解析:
(1)调节杠杆在水平位置平衡,杠杆右端偏高,左端的平衡螺母应向上翘的右端移动,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小;
(2)设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:
FALA=FBLB,即4G×3L=FB×2L,解得FB=6G,需挂6个钩码;
根据杠杆的平衡条件:
FALA=FBLB,若A、B两点的钩码同时向远离支点的方向移动一个格,则左侧4G×4L=16GL,右侧6G×3L=18GL,因为16GL<18GL,所以杠杆右端会下沉;
(3)当弹簧测力计在C点斜向上拉(与水平方向成30°角)杠杆,此时动力臂等于
OC=
×4L=2L;根据杠杆的平衡条件F1L1=F2L2得F1=
=
=0.8N,每个钩码重0.4N,故应在A点挂2个钩码.
1.A.解析:
A、食品夹在使用时,阻力臂大于动力臂,属于费力杠杆;故A正确;
B、裁纸刀在使用时,动力臂大于阻力臂,属于省力杠杆;故B错误;
C、天平在使用时,动力臂等于阻力臂,故属于等臂杠杆;故C错误;
D、瓶盖起子在使用时,动力臂大于阻力臂,属于省力杠杆;故D错误.
2.C.解析:
A、刀刃很薄是通过减小接触面积来增大压强的,故A错误;
B、铡刀在使用时动力臂大于阻力臂,实质上是一种省力杠杆,故B错误;
C、甘蔗放在a点比b点时的阻力臂更小,根据杠杆的平衡条件可知,动力会越小,更易被切断,故C正确;
D、手沿F1方向用力比沿F2方向时的动力臂要小,根据杠杆平衡条件可知,动力越大,故D错误.
3.B.解析:
由图可知,车轮转轴为支点,动力臂L1=0.6m+0.3m=0.9m,阻力臂L2=0.3m,
由FL1=GL2可得:
F×L1=G×L2,代入数值得:
F×0.9m=1200N×0.3m,
解得:
F=400N.
4.A.解析:
(1)如图所示,每个钩码的质量为50g,重力为G=mg=0.05kg×10N/kg=0.5N,杠杆上每小格的长度假设为1cm,则FA=0.5N×3=1.5N,LA=1cm×2=2cm,FB=0.5N×2=1N,LB=1cm×3=3cm;所以FA×LA=FB×LB
(2)在A、B两处再各加挂一个50g的钩码后,FA′=0.5N×4=2N,FB′=0.5N×3=1.5N,LA和LB的长度都不变,则FA′×LA=2N×2cm=4N•cm,FB′×LB=1.5N×3cm=4.5N•cm
因为FA′×LA<FB′×LB,所以杠杆右边下倾.
5.B.解析:
使箱体从图中位置绕O点缓慢逆时针转至竖直位置时,箱子的重力不变,即阻力不变,阻力臂逐渐减小.根据杠杆的平衡条件:
F1L1=F2L2知,要使力F的大小保持不变,需要使阻力臂和动力臂同减小;A、当F垂直于OA时,动力臂大小不变,故A不符合题意;
B、若F竖直向上时,动力臂减小,故B符合题意;C、若F沿OA向上时,动力F的力臂为零不能将箱体从图中位置绕O点缓慢逆时针转至竖直位置,故C不符合题意;
D、若F水平向左时,动力臂增大,故D不符合题意.
6.C.解析:
如图所示,踮脚时,脚掌与地面接触的地方是支点,小腿肌肉对脚的拉力向上,从图中可知动力臂大于阻力臂,是省力杠杆.
7.AC.解析:
(1)原来平衡时,m1gl1=m2gl2,由图知,l1>l2,所以m1<m2,设移动相同的距离L,则左边:
m1g(l1﹣△l)=m1gl1﹣m1g△l,右边:
m2g(l2﹣△l)=m2gl2﹣m2g△l,
因为m1<m2,所以m1△lg<m2△Lg,m1(l1﹣△l)g>m2(l2﹣△l)g,则杠杆的左端向下倾斜.故A正确,B错误;
(2)因为m1(l1﹣△l)g>m2(l2﹣△l)g,故往右边加入货物后杠杆平衡即m1(l1﹣△l)g=(m2+mg)(l2﹣△l),且m1gl1=m2gl2,得m=(m2﹣m1)
,故C正确,D错误.
9.20;60;540.解析:
(1)由题根据杠杆的平衡条件有:
F×OB=G×OA,
即:
F×(0.6m﹣0.2m)=40N×0.2m,所以:
F=20N;即手压木棒的压力大小为20N;
肩对木棒的支持力大小为F′=F+G=20N+40N=60N;以人为整体,人处于静止状态,受到人、物体的重力和地面对人体的支持力是一对平衡力,大小相等,即F支=G人+G物=mg+G物=50kg×10N/kg+40N=540N.又因为人对地面的压力大小和地面对人体的支持力是一对相互作用力,大小相等,即F压=F支=540N.
10.省力;A.解析:
根据起瓶器的使用可知,支点是A点,动力作用在手与起瓶器接触点,阻力作用在B点,所以,起瓶器在使用过程中,动力臂大于阻力臂,属于省力杠杆.
11.1:
变大.解析:
(1)设杠杆上一个小格的长度为L,根据杠杠的平衡条件可得:
4×0.5N×4L=F×8L,解得F=1N;
(2)当弹簧测力计在B处竖直向上拉时,拉力的方向竖直向上与杠杆垂直,动力臂等于支点到力的作用点的距离;当弹簧测力计逐渐向右倾斜时,拉力的方向不再与杠杆垂直,动力臂变小,根据杠杆平衡条件可知,动力变大,弹簧测力计的示数变大.
12.省力;逐渐变小.解析:
(1)独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆.
(2)向上施加在车把手上的力始终与把手垂直,则动力臂大小不变,而阻力G不变,阻力臂变小,由杠杆平衡条件可得,动力F将变小.
13.定;改变力的方向.解析:
由图可知,旗杆顶部滑轮的轴是固定的,所以该滑轮为定滑轮,使用定滑轮的优点是可以改变力的方向,但不能省力.
14.100;4.解析:
由图知,使用滑轮组,承担物重的绳子股数n=2.
(1)不计绳重、动滑轮重及摩擦,拉力F=
G=
×200N=100N;
(2)绳子自由端向下移动的距离:
s=2h=2×2m=4m.
15.100;20.解析:
(1)因为动滑轮有两段绳子吊着物体,不计动滑轮重、绳重和摩擦,拉力F=
G=
×200N=100N;
(2)若不计绳重及摩擦,实际测量A端的拉力为110N时,根据F=
(G+G动)得G动=2F﹣G=2×110N﹣200N=20N.
16.b;10;0.解析:
(1)a是定滑轮,本质是等臂杠杆;b是动滑轮,本质是动力臂为阻力臂两倍的省力杠杆;
(2)使用定滑轮不省力也不费力,若不计摩擦和滑轮重力,则F1=G=10N;匀速提升物体,则a图中物体受到的重力和拉力是一对平衡力,其合力的大小为0N.
17.10;2.解析:
(1)由图甲可知,n=3,不计滑轮重与摩擦,则拉力的大小:
F=
G=
×30N=10N;
(2)图乙杠杆水平平衡,设杠杆上每个格的相等为L,则A物体对杠杆拉力的力臂LA=2L,B物体对杠杆拉力的力臂LB=4L,由F1L1=F2L2可得,FALA=FBLB,
则
=
=
=2,即FA=2FB.
18.如图所示。
解析:
阻力F2是重物对杠杆的拉力,作用点在杠杆上,方向竖直向下;
过力臂L1的右端,作垂直于L1的直线,与杠杆的交点为力F1的作用点,方向斜向右上方;
19.如图所示。
解析:
由题意知,铁锹与地面间的接触点为支点O;在阻力与阻力臂的乘积一定的情况下,动力臂最长时最省力,由图可知,O到锹把的最远点A之间的距离作为动力臂时动力臂最长;所以,连接OA,过A点垂直于OA向右画一条带箭头的线段,即为最小动力F1.
20.如图所示.解析:
由题意知,站在地面上的人想用尽可能小的力提升水桶.所以绳子的拉力方向应向下,所以绳子应从动滑轮绕起.
21.
(1)右;
(2)1;(3)A.解析:
(1)如图,杠杆的右端上翘,所以平衡螺母向上翘的右端移动.
(2)设一个钩码为G,一格的长度为L;根据杠杆的平衡条件:
4G×2L=2G×nL,解得:
n=4,故应该将B处所挂钩码须向右移动4﹣3=1格;
(3)杠杆处于图甲所示位置时,杠杆没有调平就挂上钩码进行实验,杠杆的重心不在支点上,杠杆的自重对杠杆平衡产生影响,故①正确;
杠杆不在水平位置平衡,力臂不在杠杆上,不便于测量力臂,不便于得出杠杆的平衡条件,但可以得出杠杆的平衡条件.故②正确,③错误.
故选A
22.D.解析:
A、当弹簧测力计在A点斜向上拉(与水平方向成30°角)杠杆,此时动力臂等于
OA=
×4×2cm=4cm,故A错误;
B、阻力臂的大小:
L2=3×2cm=6cm>L1,杠杆为费力杠杆,故B错误;
C、由图中弹簧测力计指针在3N,弹簧测力计的示数为3N,故C错误;
D、根据杠杆的平衡条件F1L1=GL2得G=
=
=2N,故D正确.
23.D.解析:
设杠杆上每一小格为L,
根据杠杆平衡条件得:
G甲×4L=G乙×8L﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣①,
因为G=mg=ρVg,
所以①式可写为:
ρ甲V甲g×4L=ρ乙V乙g×8L,
整理可得
=
=
=
.
24.A.解析:
杠杆ABC,支点是B,动力臂大于阻力臂,是一个省力杠杆;杠杆OED,支点是O,动力臂小于阻力臂,是费力杠杆,杠杆OBD是费力杠杆,杠杆ABC是一个省力杠杆,故A正确.
25.C.解析:
由题知,两装置都不计摩擦、动滑轮重和绳重,提升物体的重相同,
甲图,拉力作用在动滑轮的轴上,费一倍的力,即F甲=2G;
乙图,拉力作用在绳子自由端,省一半的力,即F乙=
G,故F甲>F乙,AD错误;
物体上升的速度相同,则拉力端的速度分别为:
v甲=
v物,v乙=2v物,
甲图拉力的功率:
P甲=F甲v甲=2G×
v物=Gv物;
乙图拉力的功率:
P乙=F乙v乙=
G×2v物=Gv
 升级会员
升级会员 