自动驾驶CWS模式的使用方法.docx
《自动驾驶CWS模式的使用方法.docx》由会员分享,可在线阅读,更多相关《自动驾驶CWS模式的使用方法.docx(13页珍藏版)》请在冰豆网上搜索。
自动驾驶CWS模式的使用方法
自动驾驶CWS模式的使用方法
1月30日CA1486机组在北京机场复飞的过程中,出现了因机组误操作使飞机进入到自动驾驶CWS模式,致使飞机穿越改平高度的不安全事件。
在此之前飞行部也曾出现过多起因机组操作CWS模式不当引起的不安全事件,为彻底规避这一风险,特详细总结该模式的使用方法。
一、何为CWS模式
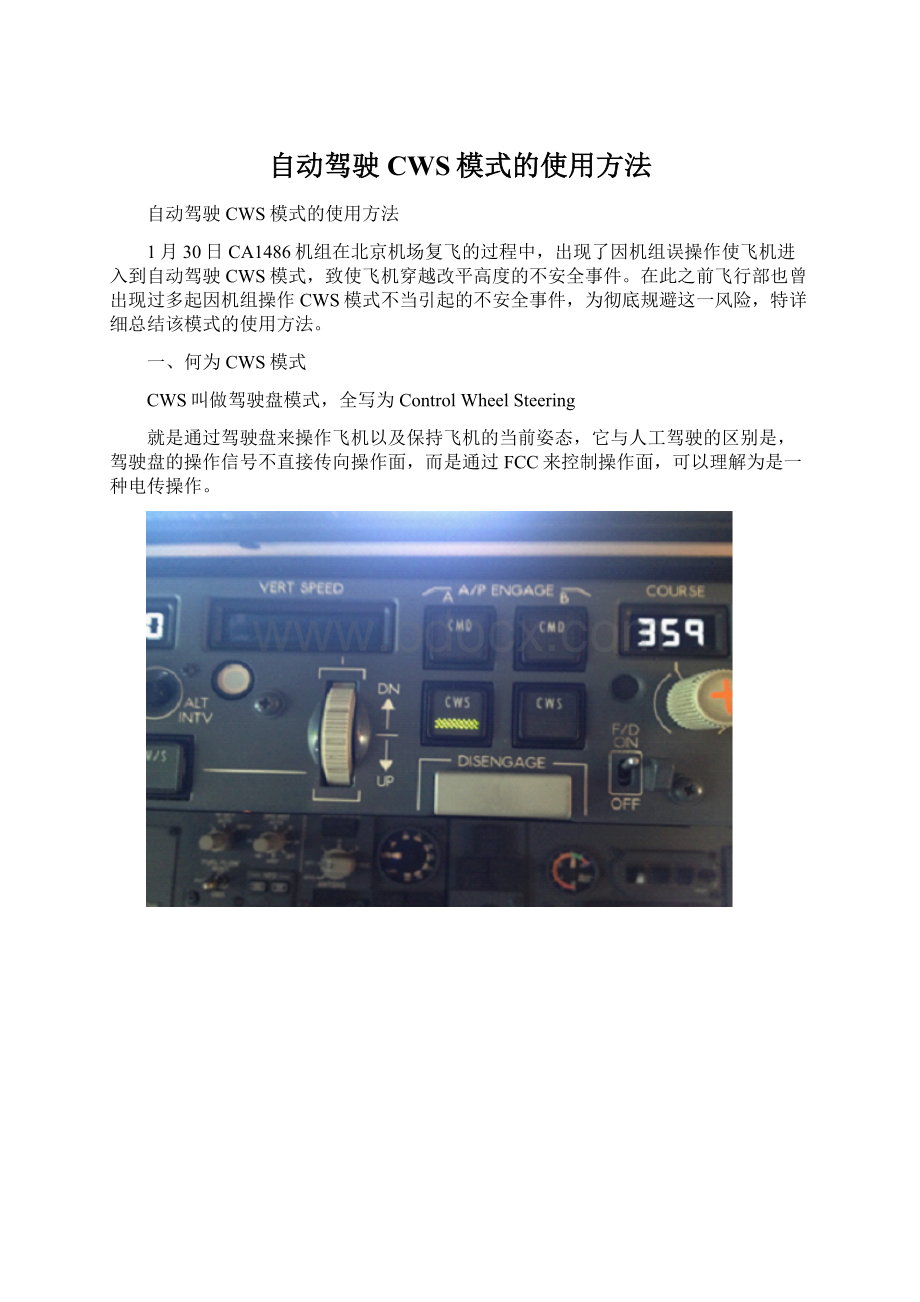
CWS叫做驾驶盘模式,全写为ControlWheelSteering
就是通过驾驶盘来操作飞机以及保持飞机的当前姿态,它与人工驾驶的区别是,驾驶盘的操作信号不直接传向操作面,而是通过FCC来控制操作面,可以理解为是一种电传操作。
二、如何进入CWS模式以及改出方法
1、在自动驾驶CMD模式对驾驶盘施加横侧方向大于25磅的操纵力,自动驾驶进入CWS横滚方式(CWSR)
改出方法:
在不对驾驶盘施加操纵力的情况下,在MCP面板选择横滚方式,自动驾驶将恢复到CMD模式
2、在自动驾驶CMD模式对驾驶盘施加俯仰方向大于25磅的操纵力,自动驾驶进入CWS俯仰方式(CWSP)
改出方法:
在不对驾驶盘施加操纵力的情况下,在MCP面板选择俯仰方式,自动驾驶将恢复到CMD模式
3、人工在MCP板上选择正在生效的自动驾驶横滚或俯仰方式,也会进入到上述的CWS方式(CWSR/CWSP)
改出方法:
在不对驾驶盘施加操纵力的情况下,在MCP面板选择横滚或俯仰方式,自动驾驶将恢复到CMD模式
4、在自动驾驶接通CMD模式ILS进近的过程中,当航道已经截获,并且APP电门在预位的情况下再次按压APP电门会进入到CWSR方式
改出方法:
在不对驾驶盘施加操纵力的情况下,在MCP面板选择横滚方式自动驾驶将恢复到CMD模式
5、人工选择MCP板上的CWS电门进入到自动驾驶的CWS模式;
改出方法:
在不对驾驶盘施加操纵力的情况下,人工选择MCP面板上的CMD按钮即可。
三、当以第二部分中所提到的5种情况进入了CWS模式时,飞行员也可以使用以下几种方法恢复到人工操纵:
1、按压驾驶盘上的自动驾驶脱开电门
2、使用电动配平
3、使用自动驾驶脱开杆
四、自动驾驶CWS模式的保护功能
1、当自动驾驶进入到CWS模式后,如果在坡度等于或低于6°时松开副翼操纵力,则自动驾驶压盘使机翼水平并保持当前航向。
注:
下列情况除外
①1500FT无线电高度以下,起落架放下;
②真空速250KT或以下时,F/DVOR截获后;
③APP方式下,F/DLOC截获后。
2、在预选高度上ALTHOLD方式下,如果俯仰被人工超控,ALTHOLD变为CWSP,如果在预选高度250英尺以内松开操纵力,CWSP变为ALTACQ,飞机回到预选高度,同时ALTHOLD接通。
如果一直保持升降舵力至超出预选高度250英尺以上,俯仰则保持CWSP方式。
3、当自动驾驶进入到CWS模式后,如果出现坡度大于30°的情况下,则自动驾驶压盘使坡度保持在30°
以上就是自动驾驶CWS模式的操纵方法,希望大家能认真学习该模式的使用方法,避免不安全事件再次发生。
 升级会员
升级会员 