过程控制课程设计pid参数整定.docx
《过程控制课程设计pid参数整定.docx》由会员分享,可在线阅读,更多相关《过程控制课程设计pid参数整定.docx(2页珍藏版)》请在冰豆网上搜索。
过程控制课程设计pid参数整定
一、课程设计题目:
给定被控对象参数,选择PID控制器比例系数KP,积分时间Ti,微分时间Td,使被控对象在输入出现扰动的情况下能够达到既定要求的控制曲线。
二、课题分析:
1、控制系统的参数整定可分为理论计算法和工程整定法,理论计算方法是基于一定的性能指标,结合组成系统各环节的动态特性,通过理论计算求得控制器的动态参数设定值,这种方法比较复杂繁琐,使用不方便,因此一般仅作参考,而工程整定法则是源于理论分析,结合实验,工程实际经验等一套工程上的方法,较为简单,易掌握。
2、要求:
(1)通过参数整定选择合适的参数,首先要保证系统稳定,这是最基本的要求。
(2)在热工生产过程中,通常要求控制系统有一定的稳定裕度,即要求过程有一定的衰减比,一般要求4:
1~10:
1
(3)在保证稳定的前提下,要求控制过程有一定的快速性和准确性,所谓准确性就是要求控制过程的动态偏差和稳态偏差尽量小,而快速性就是要求控制过程的时间尽可能短。
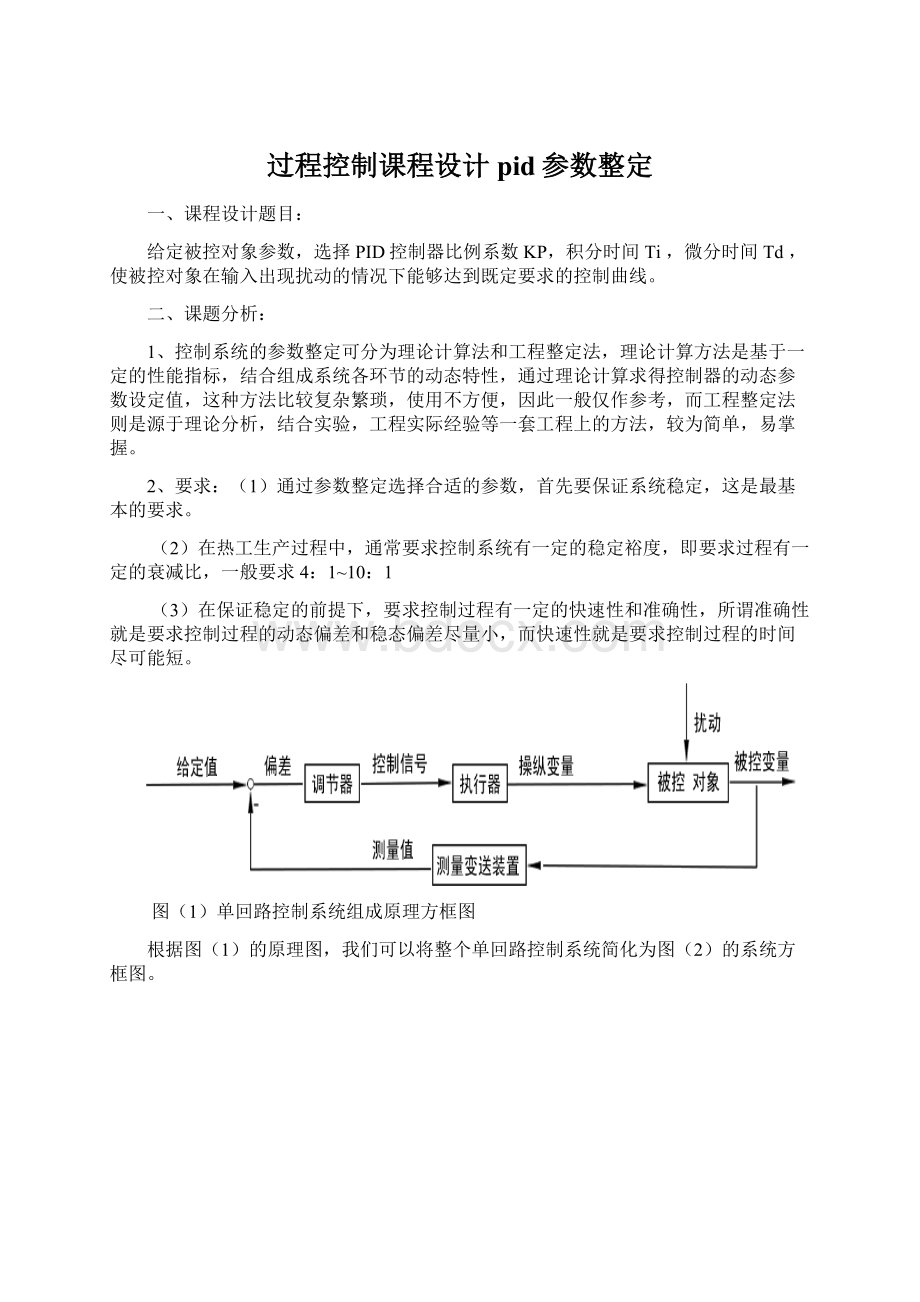
图
(1)单回路控制系统组成原理方框图
根据图
(1)的原理图,我们可以将整个单回路控制系统简化为图
(2)的系统方框图。
图
(2)
图中Gc(s)为控制器传递函数,可以用下图(3)所示的PID控制器结构图表示。
上图为典型的PID控制系统结构图。
在PID调节器的作用下,对误差信号分别进行比例、微分、积分组合控制,调节器的输出作为被控对象的输入控制量。
PID控制算法的模拟表达式为:
相应的传递函数为:
式中Kp为比例系数;Ti为积分时间常数;Td为微分时间常数。
在传统的PID调节器中,确定KP、Ti、Td3个参数的值,是对系统进行控制的关键,因此,在控制最主要的问题是参数的整定问题,在PID参数进行整定时,若是理论方法确定PID参数当然是最为理想的,但实际应用中,更多的是通过试凑来确定PID的参数。
而利用matlab强大的仿真工具箱的功能,可以方便的解决整定的问题。
 升级会员
升级会员 