电子设计方案.docx
《电子设计方案.docx》由会员分享,可在线阅读,更多相关《电子设计方案.docx(15页珍藏版)》请在冰豆网上搜索。
电子设计方案
模拟路灯控制系统(I题)
【高职高专组】
一、任务
设计并制作一套模拟路灯控制系统。
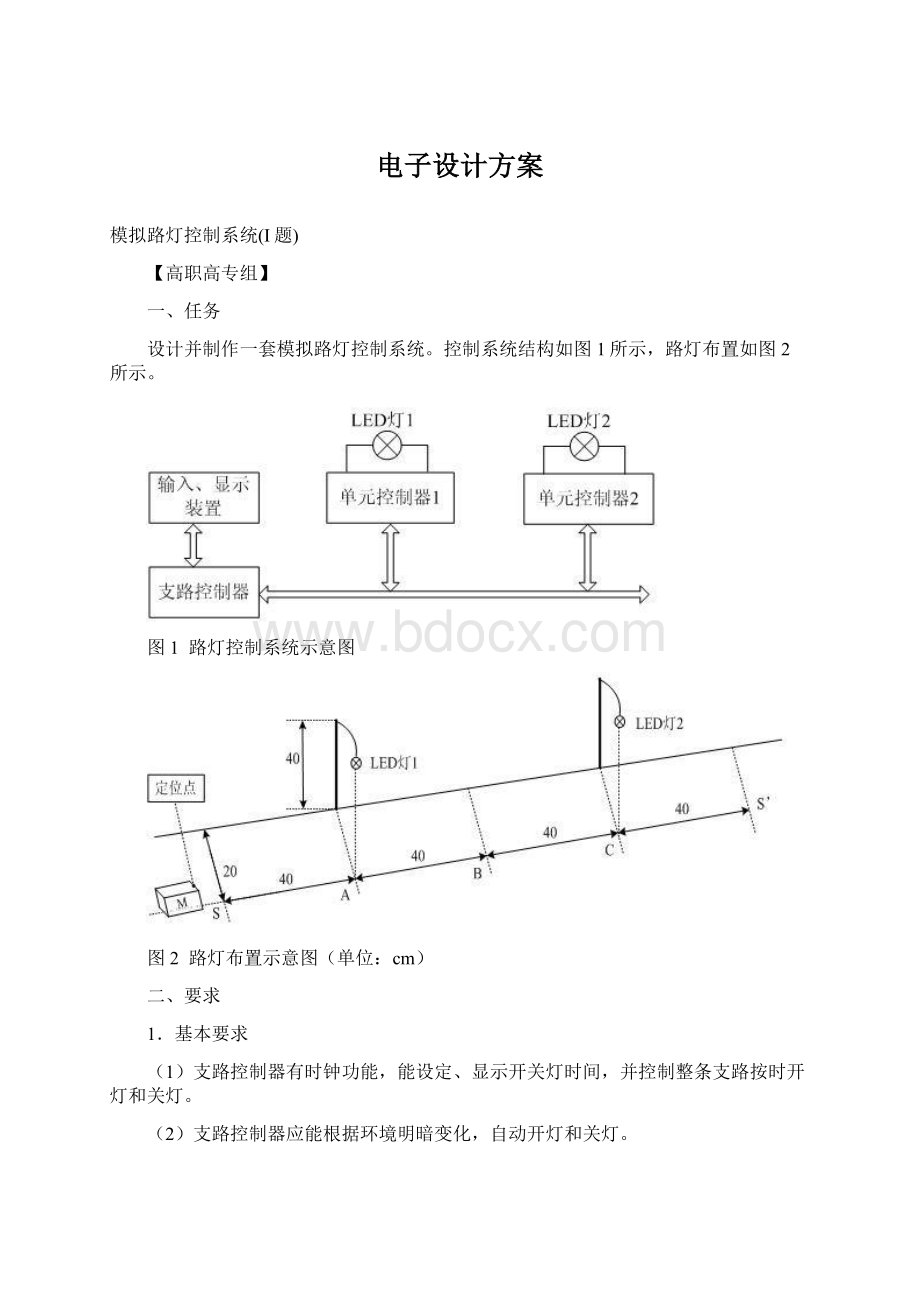
控制系统结构如图1所示,路灯布置如图2所示。
图1 路灯控制系统示意图
图2 路灯布置示意图(单位:
cm)
二、要求
1.基本要求
(1)支路控制器有时钟功能,能设定、显示开关灯时间,并控制整条支路按时开灯和关灯。
(2)支路控制器应能根据环境明暗变化,自动开灯和关灯。
(3)支路控制器应能根据交通情况自动调节亮灯状态:
当可移动物体M(在物体前端标出定位点,由定位点确定物体位置)由左至右到达S点时(见图2),灯1亮;当物体M到达B点时,灯1灭,灯2亮;若物体M由右至左移动时,则亮灯次序与上相反。
(4)支路控制器能分别独立控制每只路灯的开灯和关灯时间。
(5)当路灯出现故障时(灯不亮),支路控制器应发出声光报警信号,并显示有故障路灯的地址编号。
2.发挥部分
(1)自制单元控制器中的LED灯恒流驱动电源。
(2)单元控制器具有调光功能,路灯驱动电源输出功率能在规定时间按设定要求自动减小,该功率应能在20%~100%范围内设定并调节,调节误差≤2%。
(3)其它(性价比等)。
三、说明
1.光源采用1W的LED灯,LED的类型不作限定。
2.自制的LED驱动电源不得使用产品模块。
3.自制的LED驱动电源输出端需留有电流、电压测量点。
4.系统中不得采用接触式传感器。
5.基本要求(3)需测定可移动物体M上定位点与过“亮灯状态变换点”(S、B、S’等点)垂线间的距离,要求该距离≤2cm。
四、评分标准
项目
满分
设计
报告
方案比较与论证
方案描述
比较与论证
5
理论分析与设计
单元设计
系统设计
5
电路图和设计文件
完整性
规范性
5
测试数据与分析
系统测试
结果分析
5
总分
20
基本
要求
实际制作完成情况
50
发挥
部分
完成
(1)
15
完成
(2)
25
其它
10
总分
50
题目三简易无线电遥控系统
一、任务
设计并制作无线电遥控发射机和接收机。
1.无线电遥控发射机
2.无线电遥控接收机
二、要求
1.基本要求
(1)工作频率:
fo=6~10MHz中任选一种频率。
(2)调制方式:
AM、FM或FSK……任选一种。
(3)输出功率:
不大于20mW(在标准75Ω假负载上)。
(4)遥控对象:
8个,被控设备用LED分别代替,LED发光表示工作。
(5)接收机距离发射机不小于10m。
2.发挥部分
(1)8路设备中的一路为电灯,用指令遥控电灯亮度,亮度分为8级并用数码管显示级数。
(2)在一定发射功率下(不大于20mW),尽量增大接收距离。
(3)增加信道抗干扰措施。
(4)尽量降低电源功耗。
注:
不能采用现成的收、发信机整机。
三、评分意见
项目
得分
基本要求
设计与总结报告:
方案设计与论证,理论计算与分析,电路图,测试方法与数据,结果分析
50
实际制作完成情况
50
发挥部分
完成第
(1)项
12
完成第
(2)项
8
完成第(3)项
5
完成第(4)项
5
特色与创新
20
C题水温控制系统
一、任务
设计并制作一个水温自动控制系统,控制对象为1升净水,容器为搪瓷器皿。
水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。
二、要求
1.基本要求
(1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃。
(2)环境温度降低时(例如用电风扇降温)温度控制的静态误差≤1℃。
(3)用十进制数码管显示水的实际温度。
2.发挥部分
(1)采用适当的控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统的调节时间和超调量。
(2)温度控制的静态误差≤0.2℃。
(3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化的曲线。
三、评分意见
项目
得分
基本要求
设计与总结报告:
方案设计与论证,理论分析与计算,电路图,测试方法与数据,对测试结果的分析
50
实际制作完成情况
50
发挥部分
减小调节时间和超调量
20
温度控制的静态误差≤0.2℃
10
实现打印曲线功能
10
特色与创新
10
C题自动往返电动小汽车
一、任务
设计并制作一个能自动往返于起跑线与终点线间的小汽车。
允许用玩具汽车改装,但不能用人工遥控(包括有线和无线遥控)。
跑道宽度0.5m,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm。
在跑道的B、C、D、E、F、G各点处画有2cm宽的黑线,各段的长度如图1所示。
二、要求
1.基本要求
(1)车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10秒,然后自动返回起跑线(允许倒车返回)。
往返一次的时间应力求最短(从合上汽车电源开关开始计时)。
(2)到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中心点与终点线或起跑线中心线之间距离作为偏差的测量值)。
(3)D~E间为限速区,车辆往返均要求以低速通过,通过时间不得少于8秒,但不允许在限速区内停车。
2.发挥部分
(1)自动记录、显示一次往返时间(记录显示装置要求安装在车上)。
(2)自动记录、显示行驶距离(记录显示装置要求安装在车上)。
(3)其它特色与创新。
三、评分标准
项目与指标
满分
基本要求
设计与总结报告:
方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析。
50
实际制作完成情况
50
发挥部分
完成第
(1)项
15
完成第
(2)项
25
完成第(3)项
10
四、说明
(1)不允许在跑道内外区域另外设置任何标志或检测装置。
(2)车辆(含在车体上附加的任何装置)外围尺寸的限制:
长度≤35cm,宽度≤15cm。
(3)必须在车身顶部明显标出车辆中心点位置,即横向与纵向两条中心线的交点。
简易智能电动车(E题)
一、任务
设计并制作一个简易智能电动车,其行驶路线示意图如下:
二、要求
1、基本要求
(1)电动车从起跑线出发(车体不得超过起跑线),沿引导线到达B点。
在“直道区”铺设的白纸下沿引导线埋有1~3块宽度为15cm、长度不等的薄铁片。
电动车检测到薄铁片时需立即发出声光指示信息,并实时存储、显示在“直道区”检测到的薄铁片数目。
(2)电动车到达B点以后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C点)。
C点下埋有边长为15cm的正方形薄铁片,要求电动车到达C点检测到薄铁片后在C点处停车5秒,停车期间发出断续的声光信息。
(3)电动车在光源的引导下,通过障碍区进入停车区并到达车库。
电动车必须在两个障碍物之间通过且不得与其接触。
(4)电动车完成上述任务后应立即停车,但全程行驶时间不能大于90秒,行驶时间达到90秒时必须立即自动停车。
2、发挥部分
(1)电动车在“直道区”行驶过程中,存储并显示每个薄铁片(中心线)至起跑线间的距离。
(2)电动车进入停车区域后,能进一步准确驶入车库中,要求电动车的车身完全进入车库。
(3)停车后,能准确显示电动车全程行驶时间。
(4)其它。
三、评分标准
项目
满分
基本要求
设计与总结报告:
方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析
50
实际完成情况
50
发挥部分
完成第
(1)项
15
完成第
(2)项
17
完成第(3)项
8
其它
10
四、说明
1、跑道上面铺设白纸,薄铁片置于纸下,铁片厚度为0.5~1.0mm。
2、跑道边线宽度5cm,引导线宽度2cm,可以涂墨或粘黑色胶带。
示意图中的虚线和尺寸标注线不要绘制在白纸上。
3、障碍物1、2可由包有白纸的砖组成,其长、宽、高约为50cm×12cm×6cm,两个障碍物分别放置在障碍区两侧的任意位置。
4、电动车允许用玩具车改装,但不能由人工遥控,其外围尺寸(含车体上附加装置)的限制为:
长度≤35cm,宽度≤15cm。
5、光源采用200W白炽灯,白炽灯泡底部距地面20cm,其位置如图所示。
6、要求在电动车顶部明显标出电动车的中心点位置,即横向与纵向两条中心线的交点。
F题
液体点滴速度监控装置(F题)
一、任务
设计并制作一个液体点滴速度监测与控制装置,示意图如右图所示。
二、要求
1、基本要求
(1)在滴斗处检测点滴速度,并制作一个数显装置,能动态显示点滴速度(滴/分)。
(2)通过改变h2控制点滴速度,如右图所示;也可以通过控制输液软管夹头的松紧等其它方式来控制点滴速度。
点滴速度可用键盘设定并显示,设定范围为20~150(滴/分),控制误差范围为设定值
10%
1滴。
(3)调整时间≤3分钟(从改变设定值起到点滴速度基本稳定,能人工读出数据为止)。
(4)当h1降到警戒值(2~3cm)时,能发出报警信号。
2、发挥部分
设计并制作一个由主站控制16个从站的有线监控系统。
16个从站中,只有一个从站是按基本要求制作
的一套点滴速度监控装置,其它从站为模拟从站(仅要求制作一个模拟从站)。
(1)主站功能:
a.具有定点和巡回检测两种方式。
b.可显示从站传输过来的从站号和点滴速度。
c.在巡回检测时,主站能任意设定要查询的从站数量、从站号和各从站的点滴速度。
d.收到从站发来的报警信号后,能声光报警并显示相应的从站号;可用手动方式解除报警状态。
(2)从站功能:
a.能输出从站号、点滴速度和报警信号;从站号和点滴速度可以任意设定。
b.接收主站设定的点滴速度信息并显示。
c.对异常情况进行报警。
(3)主站和从站间的通信方式不限,通信协议自定,但应尽量减少信号传输线的数量。
(4)其它。
三、评分标准
项目
满分
基本要求
设计与总结报告:
方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析。
50
实际制作完成情况
50
发挥部分
完成第
(1)项
22
完成第
(2)项
13
完成第(3)项
5
其它
10
四、说明
1、控制电机类型不限,其安装位置及安装方式自定。
2、储液瓶用医用250毫升注射液玻璃瓶(瓶中为无色透明液体)。
3、受液瓶用1.25升的饮料瓶。
4、点滴器采用针柄颜色为深蓝色的医用一次性输液器(滴管滴出20点蒸馏水相当于1ml±0.1ml)。
5、赛区测试时,仅提供医用移动式点滴支架,其高度约1.8m,也可自带支架;测试所需其它设备自备。
6、滴速夹在测试开始后不允许调节。
7、发挥部分第
(2)项从站功能中,c中的“异常情况”自行确定。
单工无线呼叫系统(D题)
一、任务
设计并制作一个单工无线呼叫系统,实现主站至从站间的单工语音及数据传输业务。
二、要求
1、基本要求
(1)设计并制作一个主站,传送一路语音信号,其发射频率在30MHz~40MHz之间自行选择,发射峰值功率不大于20mW(50Ω假负载电阻上测定),射频信号带宽及调制方式自定,主站传送信号的输入采用话筒和线路输入两种方式;
(2)设计并制作一个从站,其接收频率与主站相对应,从站必须采用电池组供电,用耳机收听语音信号;
(3)当传送信号为300Hz~3400Hz的正弦波时,去掉收、发天线,用一个功率衰减20dB左右的衰减器连接主、从站天线端子,通过示波器观察从站耳机两端的接收波形,波形应无明显失真;
(4)主、从站室内通信距离不小于5米,题目中的通信距离是指主、从站两设备(含天线)间的最近距离;
(5)主、从站收发天线采用拉杆天线或导线,长度小于等于1米。
2、发挥部分
(1)从站数量扩展至8个(实际制作1个从站),构成一点对多点的单工无线呼叫系统。
要求从站号码可任意改变,主站具有拨号选呼和群呼功能;
(2)增加英文短信的数据传输业务,实现主站英文短信的输入发送和从站英文短信的接收显示功能;
(3)当发射峰值功率不大于20mW时,尽可能地加大主、从站间的通信距离。
(4)其他。
三、评分标准
项 目
满分
基本要求
设计与总结报告:
方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析。
50
实际制作完成情况
50
发挥部分
完成第
(1)项
15
完成第
(2)项
15
完成第(3)项
15
其他
5
四、说明
1、主站需留出末级功率放大器发射功率的测量端,用于接入50Ω假负载电阻,以测试发射功率;
2、为测试方便,作品中使用的衰减器(可以自制),应与作品一起封装上交。
E题
悬挂运动控制系统(E题)
一、任务
设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点,示意图如下。
二、要求
1、基本要求:
(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;
(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;
(3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;
(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
2、发挥部分
(1)能够显示物体中画笔所在位置的坐标;
(2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;
(3)其他。
三、评分标准
项目
满分
基本要求
设计与总结报告:
方案比较、设计与论证,理论分析与计算,电路图及有关设计文件,测试方法与仪器,测试数据及测试结果分析。
50
实际制作完成情况
50
发挥部分
完成第
(1)项
10
完成第
(2)项中连续线段运动
14
完成第
(2)项中断续线段运动
16
其他
10
四、说明
1、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;
2、若在某项测试中运动超过限定的时间,该项目不得分;
3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;
4、在基本要求(3)、(4)和发挥部分
(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;
5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸)测试时自带。
 升级会员
升级会员 