SEW伺服程序编辑步骤.docx
《SEW伺服程序编辑步骤.docx》由会员分享,可在线阅读,更多相关《SEW伺服程序编辑步骤.docx(8页珍藏版)》请在冰豆网上搜索。
SEW伺服程序编辑步骤
伺服程序下载步骤
首先完成主电路和控制部分接线,完成上电测试,上电变频器七段数码管显示1。
在使用相同的伺服电机且有备份程序情况下,可选择传输备份程序。
1.打开软件MT-manage.
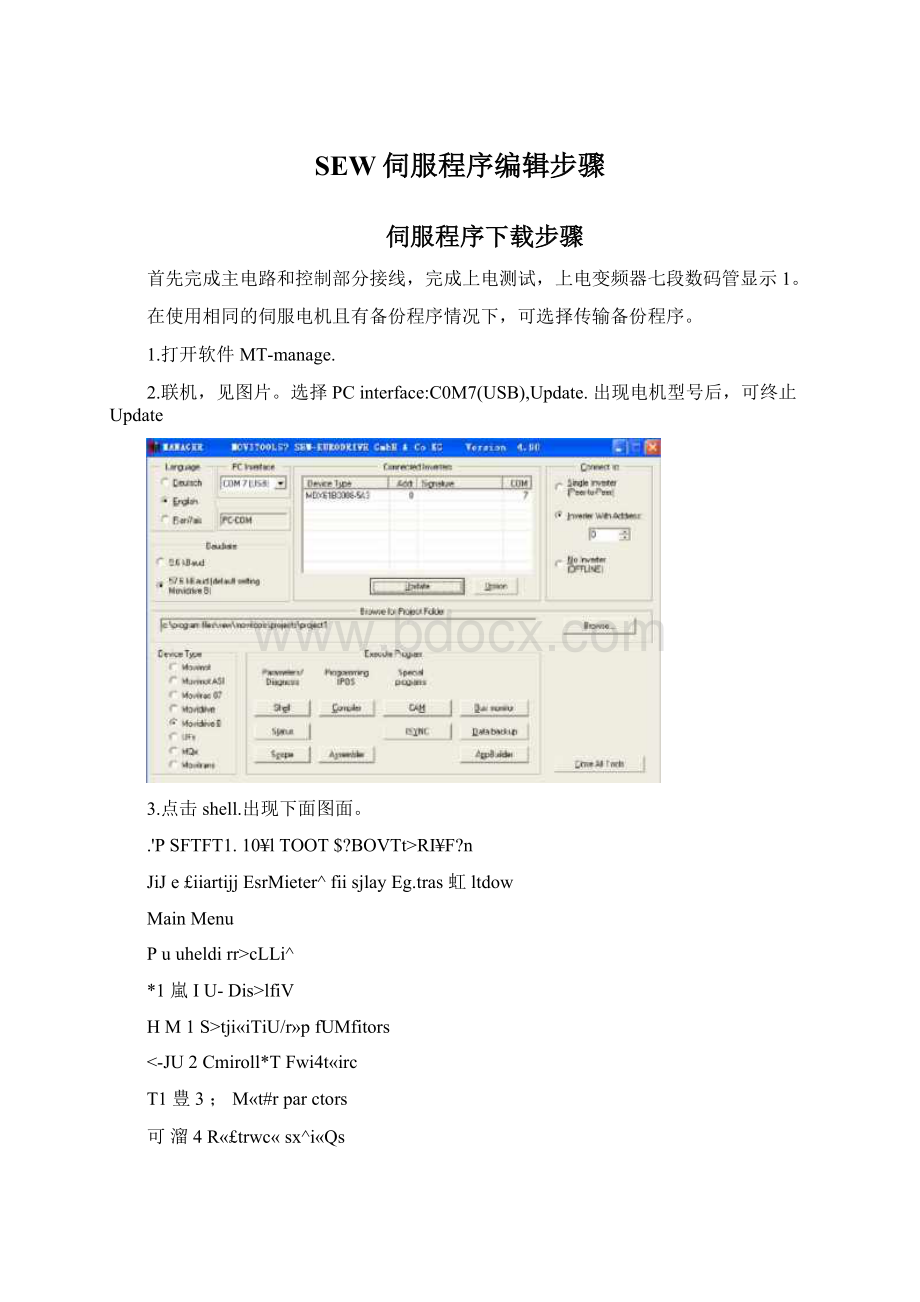
2.联机,见图片。
选择PCinterface:
C0M7(USB),Update.出现电机型号后,可终止Update
3.点击shell.出现下面图面。
.'PSFTFT1.10¥lTOOT$?
BOVTt>RI¥F?
n
JiJe£iiartijjEsrMieter^fiisjlayEg.tras虹ltdow
MainMenu
Puuheldirr>cLLi^
*1嵐IU-Dis>lfiV
HM1S>tji«iTiU/r»pfUMfitors
<-JU2Cmiroll*TFwi4t«irc
T1豊3;M«t#rparctors
可溜4R«£trwc«sx^i«Qs
亍掰-MJ.L.LE1-L/f_LL;ji.H^诃歳B•TerniDfllosiavteDt十阚了Controlfwn.cti™s
卜BLfri.1hfnnci]cue
斗9..TFOSp-sa-anatcre
*|Atpplicat-ar.3
+_Jieati(iiUul1tLe±AppLjcs.lljils
4.选择copyunitdata,出现下面画面。
叨SHELL■D¥ITOOLS?
IOVIDKIVE?
fi
FilsStartupPtr^jnetarEUispl&yEx>tr«.5WindowMelp
盍曰已老3丨昌缪
MainMenu
^tart
Cancel
在上面from…选择我们的备份程序,在下面to…选择inverter.然后点击start按钮。
5.程序传输完成后,启动程序(start)或点击闪电图标。
三•没有备份程序,可进行初始化操作+下载IPOS程序。
初始化操作如下:
1.点击start-up.出现下面画面。
注意控制器和马达的型号和参数。
2.点击Start-upSet1.出现下面画面。
3.选择Executecompletestart-up.点击"下一步”按钮。
出现下面画面。
4注意马达型号和其他参数。
点击“下一步”
。
出现下面画面
Servo
Mot-or
type
1
Motor
raced
voltage
[VI
Motor
rated
speed
[rpmj
Mains
rated
voltage
m
530Sensortype1
[nohesponse二
|NOSENSOR
<上一步⑧下一歩迎>1
取消1
5.选择“下一步”出现下面画面。
Possibleapplicattoils
IX
「Operatingmode
广Speedcontrol
ru^ehoist
US-6DC-brsikin^
iU-E-eH^irrgrestartcircuit
「厂Usesynchronousoperationcontrol[DR3]
•Positionmgv^ithiP0§
IUsetorqueojnlrol
<上下1歩g)I取消I
6.选择PositioningwithIPOS.点击"下一步”。
出现下面画面。
7.Loadinertia选择电机带动负载重量(工程经验值JOmotor参数的5-8倍)。
选择完后,
点击"下一步”,出现下面画面。
ParametersServo
App^ip
8.设置电流极限值(200%)、转速监视时间(1S)。
.再点击“下一步’,出现下一画面。
SpeedControllerParapeters
Parameters
200
Pgain,speedcont-rall&r
Timeconstantn-cantco1・
202
Gainaccel.feedforward
Filte匚
speedactual
115
rilter
getpaint
[ms]
203
Filtet
accel.
210
Pgain
heldcontroller
910
coDt-roller
Proposal
Ownlaadvalue
[i?
4i
0741
|64-
[64~
0.569
0.569
[Z99-
[Z99-
1.49
1.49
[Z99-
2.99
[105-
[los-
[1Q5-
I105-
i如曲propcsdlj
<上一^但)|下一歩道)》|
9.控制器参数接受建议值,点击”Applyproposal”•再点击"下一步’,出现下一画面。
"下一步’,出现download画面。
povrnkiadstart-upparameters
Thecabiiationthestart-uppdrametersts匚ompletei
Tojlownloadthecaciriatedpar=metBr-&totheim'ertecandtocompletethestart-uppressthebultor
Todownloadthecacidatedparcmeterstotheimerterwithoutcorrpletngtheslatt-uppessthebutton
V上一步⑧)]筈戍I观消I
11.点击download,把参数下载下去。
12.打开软件。
参数6。
Terminalassignment设置参照实际输入输出。
参数870-876设置可参考下面
执行下载然后点击“start”按钮或闪电标记。
13.选择手动操作,验证控制器和电机接线是否正确;刹车是否正常释放;机械是否卡堵或
过载。
在进行手动操作测试前,要保证DI00=1即X13的第1个端子要有24VDC
■anualOperation
SetpoirMSpeed{tptri]
F7"Var«fatespeed
FB-Skwspeed
F9»FlaDtd料州
Dradbondfltfjlion
F2-CCW
BO
F3=CW
f11-START
601W0
钉IjJ
F6*Coritrfl4winhbif
14.IPOS程序下载方法:
ActLialValues
Status
Actualposiiian|hc]
Actualspeed(l/nfdn]
CutpUcurtent(船]
bin,Inputs
bm.Outputs
R-Reset
DI0..
DI1
DO0
DO1
u
厂
r
r
厂
厂厂rrrr
4厂r
3_r厂
厂厂
F=Rdefencetravel
打开软件,与控制器连接上。
打开“机器人夹具最终。
IPC”。
ESC^Clase
 升级会员
升级会员 