第七章 捣固车.docx
《第七章 捣固车.docx》由会员分享,可在线阅读,更多相关《第七章 捣固车.docx(16页珍藏版)》请在冰豆网上搜索。
第七章捣固车
第七章抄超平起拨道捣固车
第一节概述
一、捣固车的组成与工作原理简介
捣固车是一种结构先进的自行式、多功能线路维修机械,集机、电、液、气于一体,采用了电液伺服控制、自动检测、微机控制和激光准直等先进的技术,能够实现对铁道线路的自动抄平起拨道捣固作业,具有结构复杂、操作简单、性能良好、作业效率高的特点。
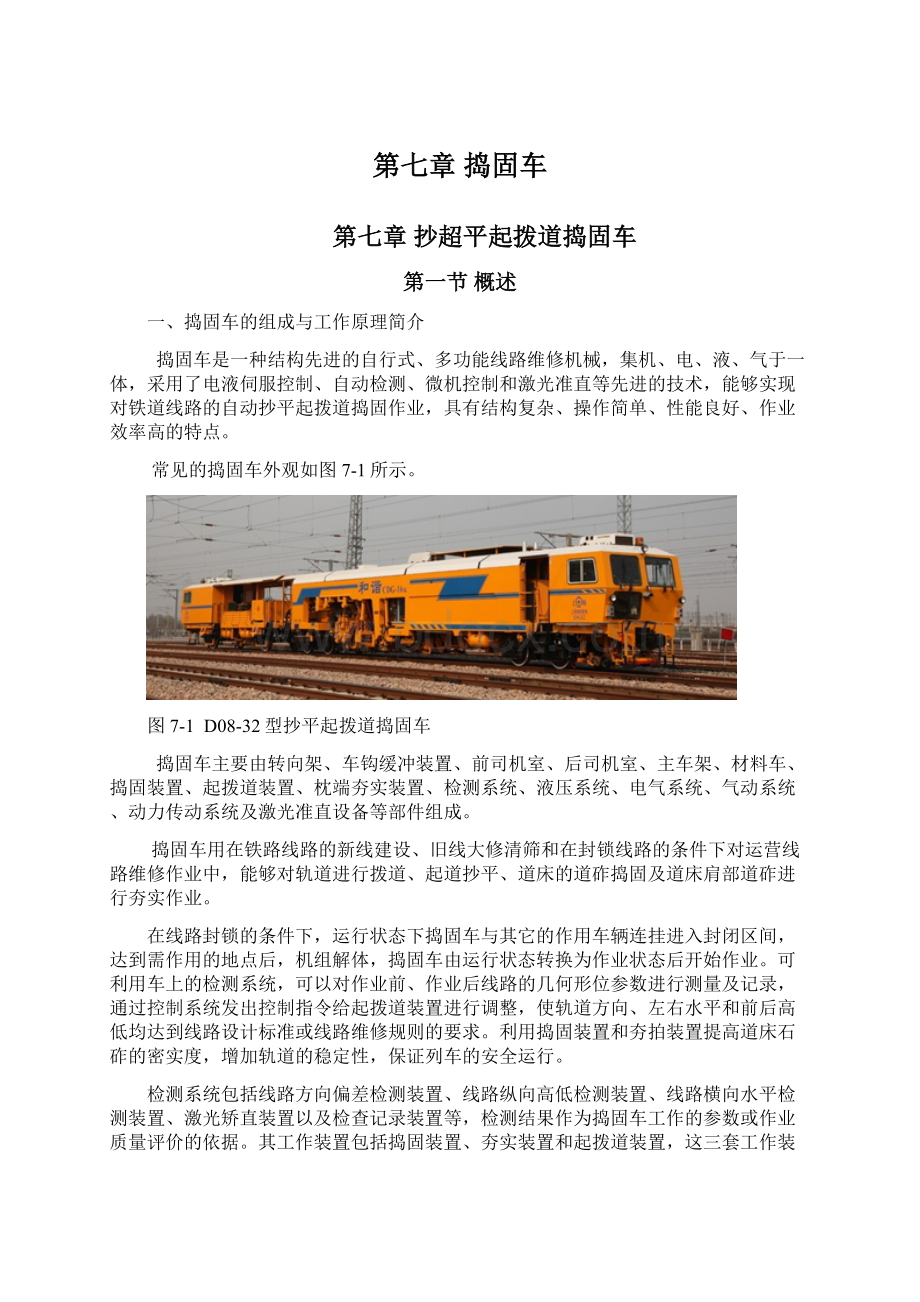
常见的捣固车外观如图7-1所示。
图7-1D08-32型抄平起拨道捣固车
捣固车主要由转向架、车钩缓冲装置、前司机室、后司机室、主车架、材料车、捣固装置、起拨道装置、枕端夯实装置、检测系统、液压系统、电气系统、气动系统、动力传动系统及激光准直设备等部件组成。
捣固车用在铁路线路的新线建设、旧线大修清筛和在封锁线路的条件下对运营线路维修作业中,能够对轨道进行拨道、起道抄平、道床的道砟捣固及道床肩部道砟进行夯实作业。
在线路封锁的条件下,运行状态下捣固车与其它的作用车辆连挂进入封闭区间,达到需作用的地点后,机组解体,捣固车由运行状态转换为作业状态后开始作业。
可利用车上的检测系统,可以对作业前、作业后线路的几何形位参数进行测量及记录,通过控制系统发出控制指令给起拨道装置进行调整,使轨道方向、左右水平和前后高低均达到线路设计标准或线路维修规则的要求。
利用捣固装置和夯拍装置提高道床石砟的密实度,增加轨道的稳定性,保证列车的安全运行。
检测系统包括线路方向偏差检测装置、线路纵向高低检测装置、线路横向水平检测装置、激光矫直装置以及检查记录装置等,检测结果作为捣固车工作的参数或作业质量评价的依据。
其工作装置包括捣固装置、夯实装置和起拨道装置,这三套工作装置可以同时工作,对线路进行捣固、夯实、起拨道综合作业,也可以单独进行捣固或是起道作业。
捣固装置是利用捣固镐的振动荷载和夹实荷载联合作用于道砟,将道砟密实。
工作时,捣固镐在振动马达作用下产生振动力,并在捣固镐升降油缸的带动下插入两轨枕中间,达到需求的深度后,夹实油缸产生夹实力,位于轨枕底部两侧的捣固镐头部相向运行,使道砟由两轨之间向轨枕底部运行,使轨枕底部的道砟重新排列并达到密实效果。
捣固车在运行时,最高速度可达80km/h,长途运行时捣固车可以连挂在货物列车的尾部。
捣固车正常作业效率为0~2200m/h。
二、捣固车的分类与发展概况
捣固车按作业对象可分为线路捣固车和道岔捣固车(如CDC-16型,08-475型道岔捣固车);按作业方式可分为步进式(如DC-32型、08-32型固车捣)和连续式捣固车(DCL-32型、09-32型捣固车);按作业功能可分为多功能捣固车(如DWL-48型集抄平起道拨道捣固稳定于一体、08-32型捣固车集抄平起道拨道于一体)和单功能捣固车。
按同时捣固的轨枕数量不同可分为单枕捣固车(如08-16型捣固车)、双枕捣固车(如DCL-32型、08-32型、09-32型捣固车)、三枕捣固车(DWL-48型捣固车)及四枕捣固车。
另外还有防尘、防噪声等具有特殊功能的捣固车。
国外的捣固车起步较早,现在生产捣固车的世界著名公司有奥地利的普拉塞与陶依尔公司(PLASSER&THEURER)、瑞士的马蒂沙公司(MATISA),美国的坦博公司(TamPer)。
我国是1983年7月铁道部在奥地利同普拉塞公司签署了08-32型起拨道抄平捣固车的订货合同,首次引进大型养路机械中的捣固车。
大型养路机械设备由于系统复杂,涉及到多中技术的综合运用,所以整机制造的难度很大,这也导致其他企业很难进入大型养路机械制造行业。
目前国内大型养路机械生产厂商有昆明中铁大型养路机械集团有限公司、襄樊金鹰轨道车辆有限公司以及陕西西铁工程机械有限公司。
根据资料显示,昆明中铁大型养路机械集团有限公司在2006年占有铁路大型养路机械约80%的市场份额,处于行业主导地位。
这三家公司均生产捣固车。
情况分别为:
陕西西铁工程机械有限公司生产的DGC系列中型捣固车,按捣镐数分为16镐(单枕)、32镐(双枕)两类。
按功能分为DGC-Ⅰ型(普通型)、DGC-Ⅱ型(半自动型)、DGC-Ⅲ型(全自动型)。
襄樊金鹰轨道车辆有限公司主要品种有DC-32Ⅲ液压道碴捣固车、DC-32Ⅳ自动抄平起拨道捣固车、DCL2-32型连续式捣固车、CDC2-16型道岔捣固车。
昆明中铁型养路机械集团有限公司主要品种有DCL-48连续走行捣固车DC32Ⅱ捣固车CDC-16道岔捣固车DCL-连续走行捣固车DC-32捣固车DCZ-32捣固车。
从捣车发展的历程来看,捣固车能够实现的功能越来越复杂,作业效率也越来越高,作业质量和操作人员的工作环境也是逐渐改善。
捣固车发展的趋势是,作业行走方式由步进式变为连续式,能够同时捣固的枕数也在增加,作业功能向集成化发展,逐渐集捣固、稳定、补砟、配碴、整形、清扫于一体,并配置新型测量装置,即应用曲线激光准直测量技术,可以进行曲线路段激光引导捣固作业。
例如国外最新车型09-4x捣固车,是世界上第一辆四枕连续捣固车,并设置有转换开关,分别可以实现单枕和双枕捣固,并且也同时能对线路进行动力稳定,其作业质量、作业效率和作业灵活性都较高。
普拉塞的UNIMAT09-4X4/4SDYNAMIC型捣固车,将捣固、稳定、清扫等各种功能集成到一起。
普拉塞的UNIMAT09-32/4SDynamic,连续式超平起拨道双枕捣固车;用于正线和道岔,带稳定车,首次将连续式正线捣固车(09-CSM)、最新型道岔捣固车(Unimat4S-serie)和稳定车的性能集于一体。
第二节08-32型综合捣固车的结构
一、组成
08-32捣固车主机由两轴转向架、专用车体和前后司机室、捣固装置、夯实装置、起拨道装置、检测装置、液压系统、电气系统、动力及动力传动系统、制动系统、操纵装置组成,并有材料车、激光准直设备、线路测量设备等附属设备等组成。
结构如图7-2所示。
二、主要性能参数
08-32型综合作业捣固车主要性能参数见表7-1:
表7-108-32综合作业捣固车主要性能参数
作业条件
项目
参数
主要性能项目
参数
适合钢轨
50kg/m、60kg/m、75kg/m
最大起道量
150mm
作业线路
单线、线间距4m以上复线
最大拨道量
±150mm
线路最大超高
150mm
捣固深度
轨顶面以下570mm
线路最大坡度
33‰
起道横向水平作业精度
±2mm
最小作业曲线半径
120m
起道纵向高低作业精度
相距10m两侧点偏差≤4mm
适应环境温度
-10℃~+40℃
拨道作业精度
±2mm(用16m弦4m距离两点正矢最大差值)
作业走形制动方式
液压制动
测量系统测量精度
1mm
三、发动机及动力传动系统
(一)柴油发动机
08-32型捣固车采用的是道依茨F12L413F型柴油机作为动力源。
柴油机安装在捣固车前司机室后补的车体中间,属于V型、12缸、直喷式斜筒形燃烧室、风冷车用高速四冲程柴油发动机,额定转速为2300r/min,额定功率为235kw,最大输出扭矩为1226N·m(转速1500r/min),燃油消耗≤216g/(kw·h)。
(二)传动系统
08-32型捣固采用了两套动力传动系统,车区间运行采用液力机械传动,进行高速走行;低速工作走行采用开式静液压传动,进行低速走行。
当捣固车长距离转移工地时,一般需要把捣固车连挂在列车尾部,在机车的牵引下高速连挂运行。
此时,必须脱开动力换挡变速箱的末级离合器,切断动力传动路线,使捣固车的车轮处于自由状态。
图7-208-32型捣固车
1一后司机室;2一中间车顶;3一高低检测弦线;4—油箱;5一柴油机;6—前司机室;7-D点检测轮;8一分动箱;9一传动轴;10一方向检测弦;11一液力机械变速箱;12一起拨道装置;13一C点检测轮;14一夯实器;15一捣固装置;16一转向架;17—B点检测轮;18一材料车;19—A点检测轮;20一激光发射器。
四、检测系统
捣固车的检测系统检测铁道线路的作业前初始的方向、水平状态,为抄平起拨道提供依据,并且能够对作业后的线路方向及水平进行检查和记录。
08-32型捣固车的检测系统包括线路方向偏差检测装置、线路纵向高低检测装置、线路横向水平检测装置、激光矫直装置以及检查记录装置。
(一)线路方向偏差检测装置
线路方向偏差检测装置由前张紧小车、测量小车、拨道小车、后张紧小车、一根钢丝弦两台矢距传感器及相应的显示仪表等组成。
如图7-3所示。
捣固车在运行时,各小车都锁定在车体上,到达作业地点后,依靠小车轮的踏面及轮缘与钢轨踏面与轨头内侧面的接触,正确地测出钢轨的实际位置。
后张紧小车也称为A点检测小车,布置在捣固车材料车的尾部;测量小车也称B点检测小车,设于后转向架的后部;拨道检测小车也称为C点检测小车,设于捣固装置与起拨道装置的中间,拨道小车将随着轨道的移动而横移;前张紧小车也称为D点检测小车,位于捣固车的前部。
由张紧气缸张紧的弦线是线路方向偏差检测系统的基准线,从B、C检测小车的矢距传感器拨叉中间穿过,当四台检测小车所接触的钢轨的方向是一条直线时,检测弦线没有对矢距感器产生压力,矢距传感器没有偏差信号输出;当B点或C点处线路方向出现偏差时,就会在相应的矢距传感器上输出相应的偏差信号,并同时在前后司机室的拨道表中反映出来,使操作人员了解线路方向偏差的大小和方向。
08-32采用三点式检测或四点式检测工作方式。
(二)线路纵向高低检测装置
图7-4线路纵向高低检测装置示意图
1—钢弦线;2—高低传感器;3—导套;4—张紧气缸;5—标尺;6—升降电机;F、M、R—前、中后检测杆;B、C、D—检测小车;Pr、Pm、Pf—电子摆
纵向高低检测装置是由安装在B、C、D三台检测小车上的检测杆、两根弦线及两台高低传感器组成。
如图7-4所示。
前、后检测杆的的下端分别与D、B检测小车的两侧托板相接触,顶端两侧张紧一根检测弦线。
弦线由前检测杆的随动机构固定及后检测杆由张紧气缸张紧,并穿过位于升降升降导杆上的高低传感器触杆上。
张紧的钢丝弦是B、D检测小车车轮之间轨面纵向高低的基准线,当拨道小车接触的C点轨道相对于弦线有高或低的变化时,高低传感器的触杆在弦线的拉动下发生转动,则轨道C点位置相对于轨面纵向基准线的高低偏差就以电信号的形式输出,并能在司机室中体现。
由于线路纵向高低在两股钢轨上完全不同,所以每股钢轨上各有一套纵向高低偏差检测装置。
(三)线路横向水平检测
线路横向水平检测主要由三个水平传感器组成,分别安装在B、C、D三台检测小车架的中央。
水平传感器又叫电子摆。
当两侧钢轨在同一水平面时,电子摆保持水平,无电信号输出;当两侧钢轨有高度差时,电子摆相对于水平转过一个角度,输出相应的电信号,通过转换就能检测出两侧钢轨间的高度差。
安装在D测量小车上的电子摆用来检测起道前线路两股的实际横向水平差值,同时输入到起道抄平电路中,作为控制起道量的依据。
安装在C测量小车上的电子摆用来检测起道过程中的轨道水平变化,操作者可以了解起道抄平作业状况。
安装在B测量小车的电子摆用来检测起道作业后的线路横向水平值,并向记录仪提供信号。
(四)激光矫直装置
线路方向偏差的基准是张紧于A、D检测小车中间的弦线,在直线区段精度不够,所以附加激光矫直装置。
激光矫直装置由激光发射装置和接收装置组成。
激光发射装置装在专门的激光发射小车上,作业前,将激光发射小车退至捣固车前方300m左右处,瞄准镜对准位于捣固车的D检测车上的激光接收器中心,发出激光。
当D点小车处于线路方向没有偏差时,接收器中心与激光束重合,不输出差频信号;当有方向偏差时,接收器会有差频信号,通过电气控制系统驱动激光接收装置的接收跟踪机构,带动接收器向激光束中心移动,同时输出一个相应D点方向偏差信号。
五、工作装置
08-32型捣固车的工作装置有捣固装置、夯实装置和起道装置。
这三套工作装置可以同时作业,也可以单独进行捣固或是起拨道作业。
(一)捣固装置
08-32型捣固车有两套捣固装置,左右对称安装在捣固车中部的两个捣固框架里。
每套捣固装置有16捣固镐,每次可以同时捣固两根轨枕,因此也称为双枕捣固装置。
双枕捣固装置主要由升降机构、捣固镐、偏心轮、内外夹持油缸、捣固镐夹持宽度调整机构等组成。
捣固装置移动到工作位置时,捣固装置升降机构将捣固装置从一定高度迅速下降,使捣固镐头插入道床设定深度。
同时偏心轮产生的振动力传递给内外夹持油缸,通过夹持油缸传递给捣固镐,使之产生强迫摇摆振动。
然后夹持油缸工作,推或拉镐臂做较大幅度的摆动,通过搞头实现对道砟的夹持作用。
作业完毕后,夹持油缸回原位,捣固镐回原位,升降装置使捣固装置提升高于轨面,作业完毕,进入下一个作业位置进行下一根轨枕的捣固。
(二)夯实装置
夯实装置由激振器、升降限位机构、减振及锁定机构组成,安装在捣固装置框架的外侧对称布置,用来夯实道床肩部的石砟,增大道床的横向阻力。
升降限位机构随着捣固装置的降落自动降落,控制激振器落在被捣固轨枕外的道床肩上进行道床夯实。
当捣固装置升起时,夯实装置也随之升起,准备向下一个夯实位置移动。
(三)起、拨道装置
起、拨道装置由起道油缸、拨道油缸、导向柱、拨道轮、夹轨轮组、起道架和摆架等组成。
工作时,起道油缸上升,夹轨轮组夹住钢轨的头部,把整个轨排提起,高度根据线路维修的要求。
需要拨道时,拨道油缸工作,传递拨道力给拨道轮,使轨道向左或是向右移动,直至拨道作业完成。
拨道作业完成后,依靠自重使起、拨道装置下降,夹轨轮与拨道轮处于松弛状态,并随着捣固装置沿着轨头侧面及下颚部移动到下一个工作地点。
第三节08-32型综合捣固车的施工作业
一、连挂运行
捣固车一般与清筛车、动力稳定车、配砟整形车组成一个大修机组,按规定必须挂在一起进入封锁区间,也必须连挂在意一起撤出施工场地。
大修机组达到施工地段时,需对连挂列车进行摘挂作业。
摘挂作业后的机械车在封锁区间独自运行,续行间隔不得少于300m,做好随时停车的准备。
二、作业准备
(一)作业转换
捣固车运行到作业地点后,降低柴油机转速,施加空气制动,回空挡位,停止发动机。
接合液压泵离合器,重启柴油机,并使转速略高于怠速,接通作业电源,缓解空气制动,接合主驱动离合器,再施加空气制动,换挡手柄回空挡位,接通作业风路。
将车轴支承开关阀扳至作业位,使转向架及车体的支撑油缸处于作业位置,同时,液压作业制动开始作用。
缓解空气制动,将大、小闸手把置于运转位。
接合作业驱动从动转向架的液压马达离合器,提高发动机转速至1600r/min左右。
作业转换将捣固机从运行状态转换成作业状态。
(二)落下测量小车和作业装置
依次放下D检测小车、A检测小车、C检测小车、B检测小车和起拨道装置、枕端夯实器,最后放下捣固装置。
如果作业中使用激光矫直法拨道,则卸下激光小车、激光发射器及电源,并在位于捣固机的前方的线路上固定,并打开D检测小车上的激光接收器保护罩。
(三)捣固装置的作业准备
解除捣固装置锁定机构,点动捣固装置下插踏板,放下捣固装置,启动捣固装置的振动驱动机构,使捣固机处于作业准备位置。
根据道砟的粒径和钢轨与轨枕的总高度选择捣固机装置的下插深度,道砟的板结、密实情况选择下插的速度及预设捣固镐头部夹持时间。
捣固镐下插的深度和搞头夹持时间在作业中随时调整。
道砟较松或有特殊要求时,夹持时间可以设定长一些,有效的发挥夹持的作用,又不会降低效率。
(四)前司机室的作业准备
检查并调整前端给定理论超高电位计、理论正矢给定电位计、起道输入数据显示器、拨道输入数据显示器等的数值至“零”。
如果采用激光拨道作业时,调节激光接收装置。
把工务段提供的作业地段参数如曲线同步点的公里标、缓和曲线长度、曲线超高、曲线旋向及半径等按照GVA操作方法输入GVA。
调整记录仪。
前司机室准备工作完毕后,通知后司机室,并询问是否开始作业。
三、作业操纵
(一)测量小车预加载
依次张紧左、右股钢轨纵向高低弦线、拨道测量弦线及记录仪测量弦线,并确认弦线位于测量传感器的拨叉内。
拨道弦线张紧的同时,向所有的测量小车垂向预加载调整好的压力。
按照近视法进行拨道作业时,在直线段任选一侧钢轨作为预加载方向,在曲线段预加载方向必须选择超高轨一侧;按照精确法进行拨道作业时,预加载方向必须选择预先测量的钢轨侧。
A、B、C、D检测小车的相应侧小车轮轮缘靠紧在该侧的钢轨内侧。
(二)捣固作业
提升发动机油门操纵手柄,将发动机转速调至最高作业转速(2150r/min)。
1.单步捣固作业
确认捣固机停稳且轨枕刚好处于两相对搞头中间后,踏下捣固装置下插踏板并保持,捣固镐按预定的速度下降到预设的深度时,捣镐夹持开始,在达到预定的夹持时间后夹持动作停止,松开踏板,捣固装置自动提升回到原始位置。
然后踩下作业走行踏板,捣固车行至下一对轨枕,松开踏板停止走行并自动施加液压制动。
重复循环以上的捣固作业程序完成整个路段作业。
2.半自动循环捣固
半自动循环捣固时,只踏下捣固装置下插一个踏板,并选择自动捣固模式。
选“1×”位为捣固装置完成一次下插和捣固作业;选择“2×”位为捣固装置完成两次下插和捣固作业。
踏下踏板并保持住,捣固机完成规定作业后自动运行到下一个作业地点后松开踏板,液压制动压力上升,停止走行,再次踏下踏板,第二个工作循环开始。
3.特殊路段捣固
轨枕间距较大但间距均匀的作业地段,用手动控制夹持按钮控制外侧油缸活塞杆使之完全伸出后,控制加宽调整填块完全打开后,松开手动控制夹持按钮,则外镐油缸活塞杆完全收缩。
也可以对前、后捣固镐镐头单独调整。
(三)后司机室的起拨道操作
后司机室操作人员主要完成起道抄平、拨道动作的控制,各仪表显示情况的监视以及根据显示情况适时地予以修正。
1.起道抄平作业
打开起道控制主开关,接通起道抄平系统,选择起道拨道开始带捣固装置下降按钮,捣固装置放下的同时开始起道。
观察左、右侧起道指示表及横向水平指示表,如指针在红区内,表明起拨道状态良好,可进行下一次作业;如指针向左偏转,表明改点仍需要起道,用手指拨动低侧钢轨一侧的起道补偿修正手柄,增加起道量;如指针向右偏转,表明轨道位置过高,该点应为落道。
2.拨道作业
旋动手动拨道开关可实现手动拨道作业,旋动的方向与拨道的方向一致,轨道实现横移,待拨道指示针回到红区后松开手动拨道开关,开关自动回到中位。
调整拨道指示表指针处在红色区内后,可接通自动拨道系统。
接通后,当捣固装置放下的同时,拨道作业开始。
作业中时刻监视拨道表指针的变化,当表指针打到底时,立即停止拨道作业,前后移动作业车不少于10m,观察表针的变化是否正常,以确定是线路的问题还是设备问题。
线路应力较大区域在自动拨道时,应根据应力大小设置超调值,以弥补拨道作业的位置回弹量。
(四)前司机室的起拨道操作
前司机室设置有完成起道抄平、拨道动作的操纵、调整、监视开关、仪表和线路,GVA线路数据及手动数据的输入,负责作业指令的发出。
1.直线地段的作业
在起道抄平作业的开始和结束时,以及在越过不能进行捣固机作业的地段需要对线路进行顺坡作业。
顺坡作业完毕后,捣固车越过该地段继续进行作业,又需要由低向高以规定的顺坡率顺坡,直到要求的起道量。
顺坡作业由前司机室人员完成,后司机室人员配合。
精确拨道时,操作人员随时注意前方轨枕上标记的拨道数值及拨道方向,并据此随时调整拨道量设定值。
2.曲线地段的操作
曲线地段采用GVA自动作业时,应在进入曲线作业地段前,接通GVA电源,按下开始工作键。
根据界面显示的提示信息选择三点式拨道或四点式拨道法。
输入作业开始位置,该输入值大于一个车长(22m),然后通知后司机室人员开始作业。
GVA自动工作方式出现故障时,曲线地段可采用手动控制操作。
四、作业结束
(一)收车准备
先进行顺坡作业,然后关断自动拨道系统,在二号位发出停止作业的指令后,并且左、右起道指示表及横向水平指示表均在红色范围内,鸣笛二短一长停止作业并停车。
停稳后,切断走行控制信号,降低柴油机转速至怠速(1150r/min)运转,依次松开拨道弦线、抄平弦线,撤除各检测小车的横向预加载。
(二)锁定作业装置及各检测小车
停止捣固装置振动马达运转,关闭自动横移控制开关,操作捣固装置提升阀使捣固装置提升,锁定后解除提升阀,栓上左右两侧捣固装置的保险索。
停止夯实器振动马达运转,操作夯实器提升阀使夯实器提升,告知地面辅助人员锁定后解除提升阀,拴上保险索。
锁定起拨道装置、固定激光小车、锁定各检测小车后,司机室各作业开关回位,并将捣固车从作业状态转换成运行状态。
最后连挂运行,返回驻地后,进行交接班维护保养。
第四节09-32型综合捣固车简介
一、概述
09-32捣固车是连续作业的捣固车,09-32型连续式捣固车是在08-32型捣固车的基础上加以改进的车型。
该车的捣固、起拨道、夯拍等装置安装在一个与主车分开的辅助车架上,作业时,主车可以连续的向前运行,捣固等工作装置在辅助车架的带动下按照作业循环进行捣固、起拨道和砟肩夯拍等作业,即工作小车运行→工作小车制动→捣镐振动下插→捣镐枕下夹实→捣镐提升→工作小车运行,即主机不参与工作循环。
它能在主车匀速行进的过程中实现对轨枕的作业,提高线路精度和作业效率,改善操作人员的作业条件。
09-32捣固车结构外形图见图7-5。
图7-509-32型捣固车结构示意图
1-记录小车;2-后张紧小车;3-后转向架;4-测量小车;5-枕端夯拍装置;6-捣固装置;7-拨道小车;8-起拨道装置;9-工作小车;10-主车架;11-前转向架;12-前张紧小车;13-前司机室;14-测量弦;15-后司机室;16-材料小车
二、主要性能参数
09-32型综合作业捣固车主要性能参数见表7-2:
表7-209-32综合作业捣固车主要性能参数
作业条件
项目
参数
主要性能项目
参数
适合钢轨
50kg/m、60kg/m、75kg/m
最大起道量
150mm
作业线路
单线、线间距4m以上复线
最大拨道量
±150mm
线路最大超高
150mm
捣固深度
轨顶面以下560mm
线路最大坡度
33‰
起道横向水平作业精度
±2mm
最小作业曲线半径
180m
起道纵向高低作业精度
相距10m两侧点偏差≤4mm
适应环境温度
-10℃~+50℃
拨道作业精度
±2mm(用16m弦4m距离两点正矢最大差值)
作业走形制动方式
液压制动
测量系统测量精度
1mm
09-32捣固机发动机型号为BF12L513C空冷增压型柴油机,额定功率为348kW(473hp)(2300r/min),额定转速为2300r/min。
作业走行驱动主机闭式静液压驱动,小车开式静液压驱动。
三、09-32捣固车特点
(一)电气系统
09-32捣固车在08-32捣固车的基础上增加七个电气调节系统。
即:
油门电机控制系统;工作小车比例控制系统;夹持压力比例调节系统;大车液压走行控制系统;自动踩搞控制系统;安全系统;中央润滑系统。
使作业效率和作业精度有很大的提高。
09-32捣固车的拨道原理和08-32差不多,也分为三点法和四点法,但是09车的C点工作小车的位置是不断变化的,C点的拨道正矢也随之变化。
因此为了准备期拨道,必须增加一个补偿值,这个功能由EK-348板和一个线路传感器共同完成。
大车液压走形控制系统的功能是为了保持小车和大车的正
 升级会员
升级会员 