机电控制工程基础综合练习计算题.docx
《机电控制工程基础综合练习计算题.docx》由会员分享,可在线阅读,更多相关《机电控制工程基础综合练习计算题.docx(13页珍藏版)》请在冰豆网上搜索。
机电控制工程基础综合练习计算题
《机电控制工程基础》综合练习计算题解析
1、设某系统可用下列一阶微分方程
近似描述,在零初始条件下,试确定该系统的传递函数。
解:
对微分方程进行拉氏变换,得
2、设某系统可用下列二阶微分方程
近似描述,其中c(t)为输出,r(t)为输入。
在零初始条件下,试确定该系统的传递函数模型。
解:
对微分方程进行拉氏变换,得
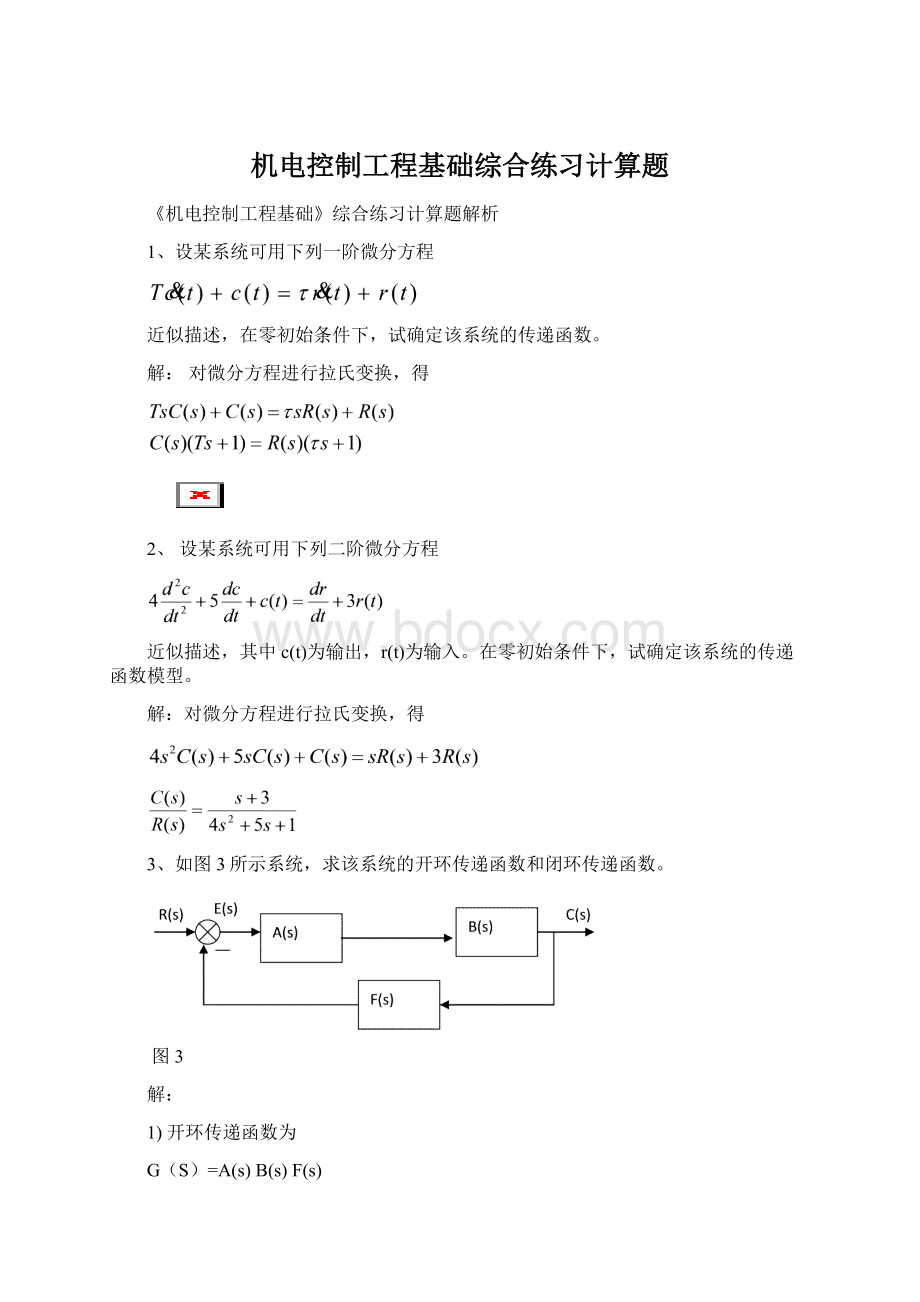
3、如图3所示系统,求该系统的开环传递函数和闭环传递函数。
图3
解:
1)开环传递函数为
G(S)=A(s)B(s)F(s)
2)闭环传递函数
4、下图为一具有电阻-电感-电容的无源网络,求以电压u为输入,uc为输出的系统微分方程式。
解:
根据基尔霍夫电路定律,有
而,则上式可写成如下形式
5、如图所示的电网络系统,其中ui为输入电压,uo为输出电压,试写出此系统的微分方程和传递函数表达式。
解:
6、动态性能指标通常有哪几项?
如何理解这些指标?
解:
延迟时间阶跃响应第一次达到终值的50%所需的时间。
上升时间阶跃响应从终值的10%上升到终值的90%所需的时间;对有振荡的系统,也可定义为从0到第一次达到终值所需的时间。
峰值时间阶跃响应越过稳态值达到第一个峰值所需的时间。
调节时间阶跃响到达并保持在终值%误差带内所需的最短时间;有时也用终值的%误差带来定义调节时间。
超调量%峰值超出终值的百分比,即
%%
7、一阶系统的阶跃响应有什么特点?
当时间t满足什么条件时响应值与稳态值之间的误差将小于5~2%。
?
解:
由于一阶系统的阶跃响应没有超调量,所有其性能指标主要是调节时间,它表征系统过渡过程的快慢。
当t=3T或4T时,响应值与稳态值之间的误差将小于5~2%。
显然系统的时间常数T越小,调节时间越小,响应曲线很快就能接近稳态值。
8、一阶系统结构图如图所示。
1)确定闭环系统的传递函数及其时间常数;
2)若要求调节时间s,待定参数应满足的要求。
(取5%的误差带,)由结构图写出闭环系统传递函数
解:
1)
则,系统的时间参数为
2)根据题意
9、已知系统闭环传递函数为:
则系统的ξ、ωn及性能指标σ%、ts(5%)各是多少?
解:
系统的闭环传递函数为
与二阶系统标准形式的传递函数
对比得:
(1)固有频率
(2)阻尼比由得
(3)超调
(4)调整时间
10、有一系统传递函数,其中Kk=4。
求该系统的超调量和调整时间;
解:
系统的闭环传递函数为
与二阶系统标准形式的传递函数
对比得:
(1)固有频率
(2)阻尼比由得
(3)超调量
(4)调整时间
11、已知单位反馈系统开环传函为,求系统的ξ、ωn及性能指标σ%、ts(5%)。
解:
先求闭环传递函数
与二阶系统标准形式的传递函数比较
对比得:
(1)固有频率
(2)阻尼比由得
(3)超调量
(4)调整时间
12、已知单位负反馈系统开环传函为,计算系统的阻尼比ξ、无阻尼自振荡角频率ωn及超调量与调节时间。
解:
系统闭环传递函数为:
与标准传递函数相比较
对比得:
(1)固有频率
(2)阻尼比由得
(3)超调量
(4)调整时间
13、某典型二阶系统的单位阶跃响应如图所示。
试确定系统的闭环传递函数。
解:
由最大超调量
计算得
另由峰值时间公式,计算得
根据二阶系统的标准传递函数表达式得系统得闭环传递函数为:
14、已知一个欠阻尼、震荡幅度大且衰减缓慢的二阶系统,,绘制出这个系统的单位反馈闭环结构图。
解:
根据二阶系统的标准传递函数表达式得系统得闭环传递函数为:
求开环传递函数
15、典型的二阶系统的两个极点为,要求:
1)确定系统无阻尼自然频率和阻尼比;
2)确定该系统的传递函数。
解:
由闭环极点的分布,可得
联立求解得
系统闭环传递函数为
16、单位负反馈系统的开环传递函数为
求闭环系统特征方程。
解:
根据二阶系统的标准传递函数表达式得系统得闭环传递函数为:
闭环系统的特征方程为:
17、某单位负反馈系统的开环传递函数为
求该系统的闭环传递函数。
解:
闭环传递函数为
18、已知系统的结构图如图所示,其中K>0,判断闭环系统的稳定性
解:
首先求内部的环节的闭环传递函数
最后
当K>0时,特征方程只有负根,或根据劳斯稳定判据可判断出系统是稳定的。
本题用劳斯稳定判据判断系统的稳定性。
劳斯表:
由上表可以看出,第一列各数为正值系统是稳定的:
,
由此得,当K>0时,根据劳斯稳定判据可判断出系统是稳定的。
19、系统的特征方程为
试用劳斯判据判断系统的稳定性。
解:
本题为5阶系统,用劳斯判据判断系统的稳定性首先要计算劳斯表,就是计算劳斯表中各元素的数值,对于5阶系统,并排列成下表:
以上各元素计算公式如下:
,,
,,
,
代入数据,得
由上表可以看出,第一列各数值的符号改变了2次,由+2变成-1,又由-1改变成+9。
根据劳斯判据,该系统有2个正实部的根,系统是不稳定的。
20、系统开环传递函数为:
用劳斯稳定判据确定系数A=0.6时系统是否稳定。
解:
本题为4阶系统,用劳斯判据判断系统的稳定性首先要计算劳斯表,就是计算劳斯表中各元素的数值,对于4阶系统,并排列成下表:
12A
4A+3
A
A
根据劳斯判据,闭环稳定的充要条件是劳斯表第一列均为正数,即:
,,
由此解得。
所以系数A=0.6时系统稳定。
21、某单位负反馈系统的闭环传递函数为
试求系统的开环传递函数,并说明该系统是否稳定。
解:
该系统的闭环极点均位于s平面的左半平面,所以系统稳定。
22、单位负反馈系统的开环传递函数为,列出罗斯表并确定使系统稳定的参数k的取值范围。
解:
系统特征方程为:
Routh:
s316
s25k
s
s0
使系统稳定的增益范围为:
。
23、已知系统的特征方程如下,试判别系统的稳定性。
=0
根据劳斯稳定判据,
得系统稳定。
24、已知系统传递函数,且初始条件为,,试求系统在输入作用下的输出。
解:
系统的微分方程为
由传递函数得
其中为的拉氏变换,即
考虑初始条件,对上式进行拉氏变换,得
对上式进行拉氏反变换
25、.单位反馈系统的开环传递函数为
(1)求静态位置误差系数和速度误差系数;
(2)在输入作用下的稳态误差;
解:
本题分二步。
第一步判定系统的型别,根据给定的开环传递函数
所以判断该系统是Ⅰ型系统,开环放大系数为5。
第二步查表得(p79),在表中查Ⅰ型系统对应的各内容,得
(1)静态位置误差系数为,静态速度误差系数为。
(2)输入为时,可以认为就是有二个输入,一个为阶跃输入,另一个为斜坡输入。
于是继续查表,得在输入作用下的稳态误差为
=0.6
 升级会员
升级会员 