倒车雷达探头位置及安装.docx
《倒车雷达探头位置及安装.docx》由会员分享,可在线阅读,更多相关《倒车雷达探头位置及安装.docx(11页珍藏版)》请在冰豆网上搜索。
倒车雷达探头位置及安装
倒车雷达探头安装位置及安装
探头安装基本要点:
○因为探头的探测角是水平广角度的,也称双角度探头,即探头的波束水平角度宽,垂直角度窄,所以通常探头应该按下图的方向与地面基本平行(无论探头支架是否左右倾斜),否则有可能会探测到地面造成误报!
探测波束截图
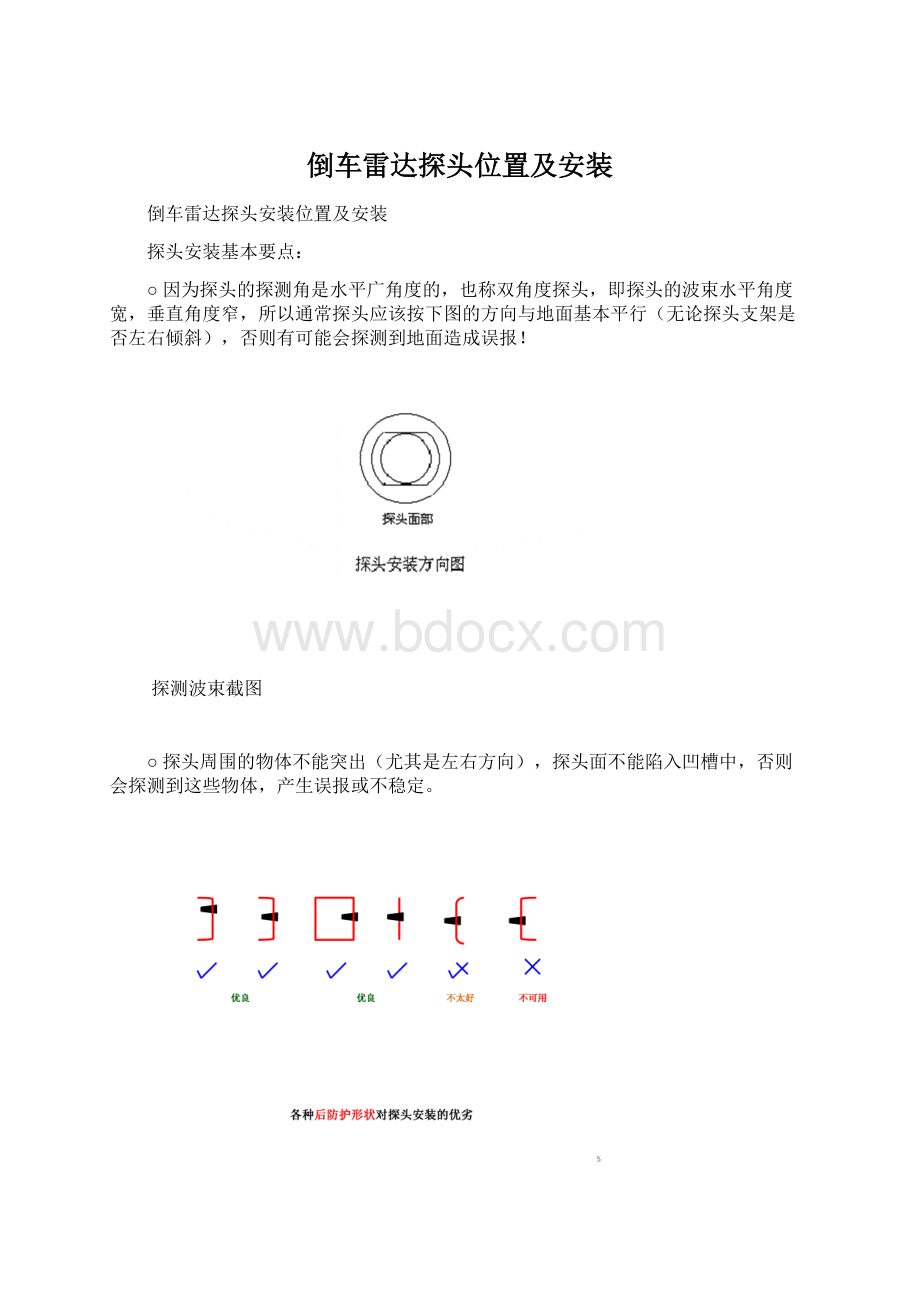
○探头周围的物体不能突出(尤其是左右方向),探头面不能陷入凹槽中,否则会探测到这些物体,产生误报或不稳定。
○探头安装高度一般为550-700mm,太低会误报地面,太高有可能测不到儿童等低矮物,最后还需在实际使用中确定。
○探头尾部不能受到强制,要有一定的自由度如下图:
此段线不能紧绷,但也不要过于松垮,要领是松而不垮
在探头附近应有一个固定点
○安装探头时,用手按压超声波探头正面靠边缘的塑料处,(不要按压超声波探头正面中央部分)。
按一下后放一下再按,这样压放多次,如果超声波探头不到位,可捏住探头尾部(不是导线),轻轻左右旋转同时后拉,直到伏贴到位为止。
到位后要注意旋正探头方向。
○卸下探头时,应轻旋探头尾部往前送,当探头前部有少许空隙时即用手指抠住胶套将探头向前轻轻拔出,以保证胶套与探头塑件不分离。
探头位置不佳引起误报的案例(误报—即车辆后侧无目标但连续或间断报警):
案例一:
探头方向不对
案例二:
探头陷入其它物体,即探头周围的物体比探头面更突出,造成声波附加反射导致误报。
案例三:
水平位置有突出的物体
周围突出的物体(尤其是左右方向),会产生镜面反射,导致误报或不稳定。
因为探头是广角的,灵敏度又很高,在水平方向远离探头2m的障碍物(指车辆上的)可能会出现附加辐射,见下图:
车辆上正对探头的障碍物探头车辆上正对探头的障碍物
整改:
采用增加装声波“耳廓”使声波绕开障碍物:
注意:
·声波挡板(耳廓)的材料是金属、塑料、橡胶等都可以,需能耐久;
·图纸中尺寸为参考值,需要实验,可用橡皮泥试,注意必须要有一定的保险余量,否则当环境变化或车辆尺寸的离散性等因数,又会产生误报;
·注意声波挡板(耳轮)的形状两头采用斜面或圆头,为的是不会刮伤人,也防止人用脚踩站;
整改后:
另一种整改方案:
采用声波整流板(将镜面反射改为斜面反射),可采用铁板,但不要有突出(声波整流板尺寸可略低于、小于尾灯),以防刮伤人。
案例四:
在声波衍射与镜面反射的共同作用下产生附加反射波,产生误报。
整改:
将图中的镜像平面改成圆柱面后问题解决(因为圆柱面比平面的声波反射量要小许多)。
附件:
倒车雷达基本特性:
倒车雷达的基本原理是依赖物体对声波的反射,其基本特性如下,并与以下因数有关:
1.物体反射面积:
面积越大反射回波越强,探测距离较远;反之较近。
2.物体位置:
物体处于探头中心线上反射波最强,探测距离较远;反之较近。
3.物体反射面的角度:
反射面越是正对探头(区别于上2.),反射波越强,探测距离较远;反之较近。
光滑平面物体方向感尤其显著。
某些特定角度时,即便目标较大,距离较近也探测不到(这就是隐形飞机原理之一)。
4.物体形状:
多角度反射面、弧面、粗糙面方向感不显著,多方向都可能探测到,但反射波较弱。
这也是隐形飞机原理之一。
5.物体的材质:
材质越硬反射波越强,反之较弱。
6.所处环境:
温度、空气湿度、气压等因素都会对探测距离产生影响。
空气湿度大信号强;温度的影响随探头参数而定。
7.干扰源:
倒车雷达探头如果靠近超声波污染源如:
喷漆、制冷剂灌装设备,气动工具出气口,以及强声波污染源如:
大功率连续冲击设备,大功率强排风电扇,强电波污染源等,都可能会出现误报或迟钝现象(误报指无障碍物而报警)。
8.倒车雷达所显示或鸣叫提示的距离指最近一个物体的距离。
9.如果左右方位灯都亮,是指车尾左右都存在同等级危险性的物体。
10.倒车速度应<5公里/小时。
11.两台以上装有倒车雷达的车辆靠近且同时工作时(<3~5米),有可能会出现误报。
12.当物体高度较低,在远距离时可能探测到,近距离却探测不到,如路牙子等。
13.如果车尾后方是下斜坡就有可能探测不到低矮的物体;是上斜坡就有可能测到地面产生误报。
14.有时会出现一会儿显示近距离,一会儿又显示远距离(尤其在车间内)。
这是因为同时探测到了两个以上的物体,且近距离物体信号较弱,间断探测到所致。
15.倒车雷达只有变速杆挂在倒挡时倒车雷达才会工作。
如果一次倒挡不成功,又立即挂倒挡,就有可能使倒车雷达机内微电脑死机,因此两次挂倒挡的时间至少要间隔1秒钟。
16.探头与地面的安装高度尤其是探头轴线与地面的角度至关重要。
一般高度应>0.55米;探头轴线与地面角度应上翘几度,至少平行。
否则有误报可能,即便当时不误报,待日后环境等情况变化后,就有可能产生误报。
17.偶然的,频次不高的误报是允许的。
18.探测角度是相对于一定条件而言的,例如120度是指在常温下500mm的距离时探测直径75长1000mm的pvc管时的角度,假如在同样距离探测直径30mm的圆管探测角可能是30度;探测50mm见方的平面可能达180度。
19.倒车雷达对绝大部分的物体都能探测到,但对一些少数特定的物体,或在特定的环境下有可能探测不到或误报。
自然环境的差异也会影响其性能。
因此即便是国际上所有倒车雷达都没有任何承担倒车事故的承诺。
2014-8-8
 升级会员
升级会员 