比目鱼说明书.docx
《比目鱼说明书.docx》由会员分享,可在线阅读,更多相关《比目鱼说明书.docx(22页珍藏版)》请在冰豆网上搜索。
比目鱼说明书
ENC-2TE型吐胶专用设备控制系统
操作手册
1概述:
ENC-2TE型控制系统是一种针对于图形吐胶设备而设计的专用设备,控制对象为步进电机或数字式交流伺服电机,及24点开关量输入输出。
本系统不仅能控制十字滑台设备进行几何运动,还提供一系列专门用于吐胶控制的系统参数,使得编程操作更加专业、实用。
1.1坐标系
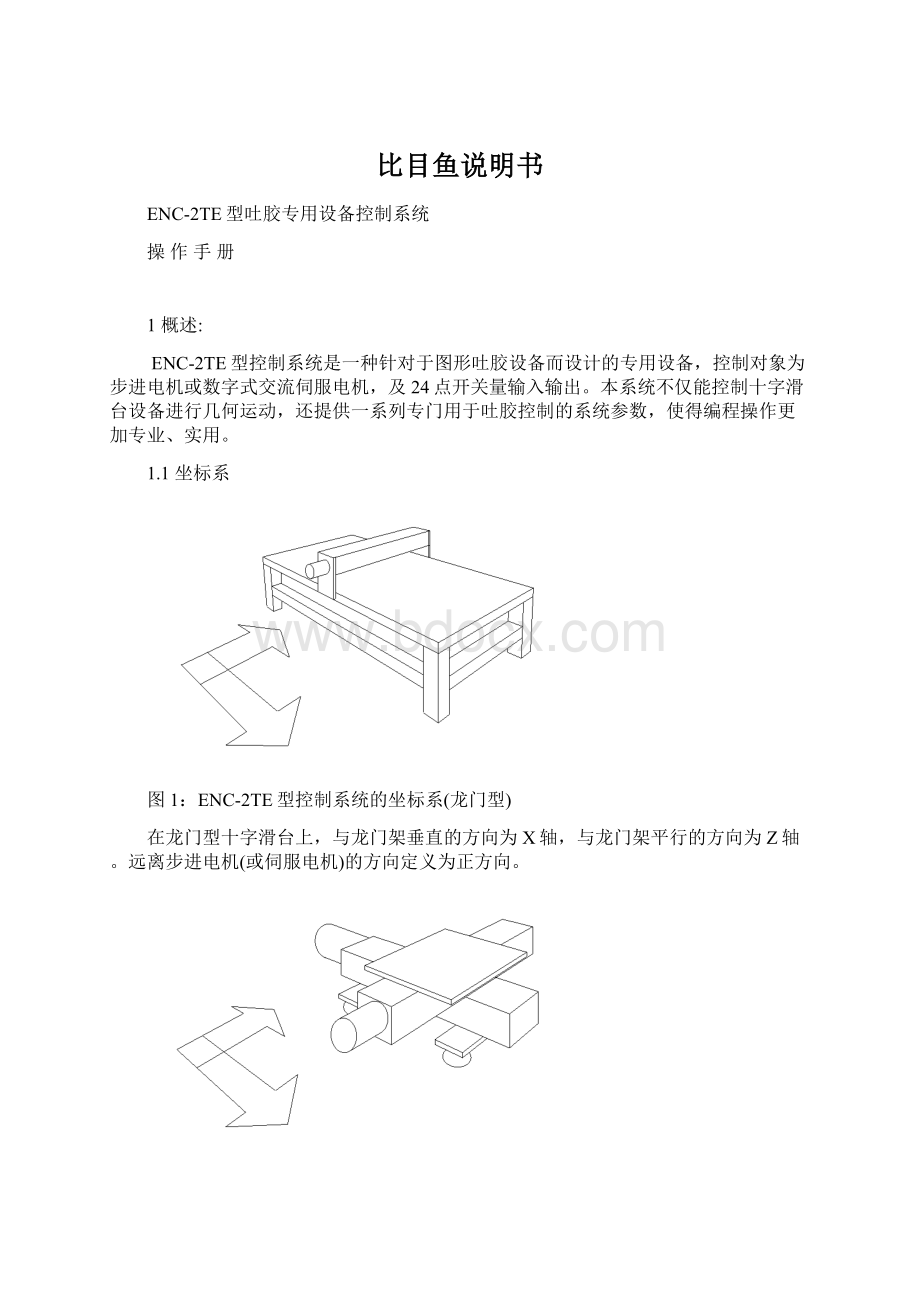
图1:
ENC-2TE型控制系统的坐标系(龙门型)
在龙门型十字滑台上,与龙门架垂直的方向为X轴,与龙门架平行的方向为Z轴。
远离步进电机(或伺服电机)的方向定义为正方向。
图2:
ENC-2TE型控制系统的坐标系(普通型)
在普通型十字滑台上,底层为X轴,上层为Z轴。
同样,远离步进电机(或伺服电机)的方向定义为正方向。
1.2绝对零点
图3:
ENC-2TE型控制系统坐标系中的绝对零点(龙门型)
如上图所示,龙门型十字滑台在相应机械位置安装有传感器,用于确定机械原点。
当系统执行搜寻机械原点操作时,坐标轴自动向机械原点方向快速靠拢并搜寻传感器信号,搜寻到信号后转为反向低速运动,直到该信号再次有效。
此时,坐标值被无条件赋为0。
普通型十字滑台没有安装传感器,故没有机械原点。
2系统操作面板
系统操作面板是人机对话的界面,使用者用键盘向系统输入程序和命令,系统通过LCD显示屏对人们的指令作出反应。
图4:
ENC-2TE型控制系统的面板
2.1显示窗口
ENC-2TE的显示窗口是一面320*240点阵的图形液晶屏。
图5:
ENC-2TE型控制系统的液晶显示屏
显示窗口在不同的操作状态下显示不同的系统资讯,具体情况稍后再叙。
2.2系统按键说明:
数控系统是通过键盘来识别操作者的命令的。
操作者须使用系统面板上的按键来将加工程序逐个字符地输入数控系统内部的存储器,并且能够进行检查、插入、删除等编辑操作。
序号
键名
功能
属性
1
N/P
行号/工件号
字母
2
G/0
准备功能标识/数字0
字母/数字
3
X/1
直线绝对坐标标识/数字1
字母/数字
4
Z/2
直线绝对坐标标识/数字2
字母/数字
5
S/3
主轴转速标识/数字3
字母/数字
6
U/4
直线相对坐标标识/数字4
字母/数字
7
W/5
直线相对坐标标识/数字5
字母/数字
8
F/6
速度及延时标识/数字6
字母/数字
9
I/7
圆弧起角标识/数字7
字母/数字
10
K/8
圆弧终角标识/数字8
字母/数字
11
R/9
圆弧半径标识/数字9
字母/数字
12
M/±
辅助功能标识/正负号
字母/符号
13
L/.
标号功能标识/小数点
字母/符号
14
ESC
退出,取消
编辑/控制
15
插入
插入程序行、字符
编辑
16
删除
删除程序行、字符
编辑
17
ENTER
回车键,完成一项输入
编辑
18
编辑
进入编辑模式
编辑
19
参数
进入参数模式
编辑
20
↑
Z正向运动/光标上移
编辑/控制
21
↓
Z负向运动/光标下移
编辑/控制
22
←
X负向运动/光标左移
编辑/控制
23
→
X正向运动/光标右移
编辑/控制
24
机械原点
返回滑台的机械定位点
控制
25
手动回零
返回程序起始点
控制
26
系统测试
图形演示程序轨迹
控制
27
坐标设置
手工修改当前坐标
控制
28
计次清零
清零副计数器
控制
29
清洗偏移
移动混胶头以便开始清洗
控制
30
启动
开始加工程序运行
控制
31
停止
暂停电机运行
控制
32
///
RESET,系统初始化
控制
图6:
ENC-2TE单轴电机控制系统的键盘定义
2.3系统的工作模式
每次上电或按下///键后系统显示开机画面:
图7:
ENC-2TE型控制系统的开机画面(版本号以实物为准)
此时可以用←和→键调整屏幕的对比度。
如果没有键盘输入,一秒钟后即进入运行模式。
2.3.1运行模式
图8:
ENC-2TE型控制系统的运行模式示意图
本模式是系统启动后的缺省模式。
只有在本模式,才可以开始运行加工程序。
2.3.2编辑模式
图9:
ENC-2TE型控制系统的编辑模式示意图
在运行模式或参数模式,按编辑键就可以进入编辑模式。
在本模式,可以新建、修改、删除加工程序。
2.3.3参数模式
图10:
ENC-2TE型控制系统的参数模式示意图
在运行模式或编辑模式,按参数键就可以进入参数模式。
在本模式,可以设置、修改一系列与吐胶操作有关的系统参数。
3系统的编程操作
为将在纸面上编好的程序输入系统存储器,以及进行必要的检查、修改,需通过一系列的按键操作来实现。
每当初次上电或按下///键后系统显示开机画面(图7),1秒钟后进入运行模式(图8)。
在运行模式中,厂牌名称的下方有一行提示:
工件:
xx行数:
xxxx目录:
xx/yy
其中“工件:
xx”表示当前工件号,“行数:
xxxx”表示本工件程序有多少程序段,“目录:
xx/yy”表示在当前文件存储器中共有
yy个程序,而本工件程序排位在第xx。
3.1检查已有加工程序目录
在运行模式下可以检查已有加工程序目录。
只要按下ENTER键,在屏幕上部的小窗口就会出现内存中已有加工程序的目录,每个工件表示为如下格式:
Pxx/yyyy其中Pxx表示第xx号工件程序,yyyy表示该工件程序共有多少行程序。
3.2新建加工程序
新建加工程序必须在编辑模式下进行。
从运行模式(待机)或参数模式,按下编辑键就可以进入编辑模式(图9)。
此时,有光标闪烁的位置
是命令栏,在命令栏中可以执行新建、编辑、删除等操作。
按下N/P键和数字键可以选择新的加工程序号,如果没有选择新的加工程序号而直接按下编辑键则开始编辑当前加工程序。
如果当前程序是空的,则开始新建加工程序。
此时,程序段号自动被指定为N0010,并且在每次完成一行程序行输入后自动递增10。
依次输入工件程序的指令标识符和数字内容,每输完一行要按ENTER键。
需要注意的是:
1.由于指令标识符和数字键是复用的,系统自动根据当前光标在文本编辑窗口的位置,以决定输入指令标识符,或是数字。
只有紧接着指令标识符才能输入数字。
在输入数字的过程中,如果需要输入新的指令标识符,只要按下该复合键超过1秒钟,光标位置会自动调整并显示新的指令标识符。
如果程序段中已经有了该指令,光标位置回到该指令处;如果程序段中没出现过该指令,光标位置转到程序段的末尾。
2.+/-键只有当光标紧跟着指令标识符时才被响应。
3.小数点只有在“X”、“U”、“F”指令段才有效。
如果在输入程序时发生差错,只要把出错的本指令段重输一遍即可。
4.示例:
新建工件,工件号01
N0010G01X+123.45F1000
N0020G25F2000
N0030M02
在命令栏中,如下操作:
N/PG/0X/1编辑
光标出现在文本编辑框,系统自动产生行号:
N0010
第一行操作如下:
长时间
G/0G/0X/1X/1M/±X/1Z/2S/3L/.U/4W/5
长时间出错长时间
F/6X/1G/0Z/2F/6X/1G/0G/0G/0ENTER
显示如下:
图11:
行编辑状态,新建程序第一行
按下ENTER键后,程序自动转入N0020行:
图12:
行编辑状态,开始输入新程序的第二行
出错长时间长时间
G/0Z/2K/8G/0Z/2W/5F/6Z/2G/0G/0G/0
ENTER此时程序自动转入N0030。
M/±G/0Z/2ENTER此时程序自动转入N0040。
程序输完以后,按ESC键,光标返回到命令栏。
这时,“工件:
01”表示当前程序号为01;“行数:
0003”表示当前程序共有3行;“目录:
01”表示目前存储器中已经有了一个工件程序。
3.2检查已有程序
(1)在编辑模式命令栏,键入要检查的工件号如上例P01:
长时间
P/NG/0X/1ENTER,在文本编辑框中会出现该工件程序的前十行,如果程序不到十行则全部显示:
图13:
命令状态,检查已有的工件程序
再次键入编辑键,光标就会移到文本编辑框第一行,这样可以从头检查或修改已有的工件。
如果不打算从头开始检查,也可以在命令栏输入程序行号,如N30,就将从行号30开始检查。
当光标处于文本编辑框中时,只要按下N/P键,光标会自动回到命令栏。
N/PS/3G/0ENTER,就将从行号30开始检查。
图14:
行编辑状态,直接检查修改程序的第三行
(2)用←和→键可以移动光标在语句中的位置,短按一次移动一个字符位置,长按超过0.5秒则移动一个命令段位置。
受显示器宽度限制,有可能不能显示完整的程序行。
如打算检查本行的其余部分,则按←和→键向前或向后分段检查。
(3)用↑和↓键可以移动光标在工件程序中的行号位置。
短按一次移动一行位置,长按超过0.5秒则移动到文本编辑框的顶部或底部。
(4)如果打算检查的行号不存在,则跳到最靠近的行号;如果行号超出范围,则跳到最后行。
(5)用户在检查的过程中,可以重新修改程序,祥见下一节。
(6)程序检查完以后,按ESC键,光标返回到命令栏。
3.3修改已有程序
3.3.1修改程序行的内容
在按照3.2节所述方式检查某一程序行时,如果发现错误需要修改程序内容,只需要用箭头箭将光标移到该处,重新输入该字符即可。
或者长按某“字母/数字”键超过0.5秒,光标会直接跳到该指令段。
例如:
………
N0020G26F2000
………
现需要将F2000改成F3000。
按3.2节所述方式检索到N0020行,见图14。
长时间
这时只需要如下操作:
F/6S/3ENTER即可。
3.3.2插入字符或新指令段
如果某段指令数值不仅需要修改,还需要增加,按下插入键后就可以插入新字符。
插入字符的数目受指令类型限制,如准备指令(G)和辅助指令(M)只允许有两位数指令内容,坐标指令(X/Z等)允许有八位数指令内容。
如果在原程序行中需要增加的是新的指令,长按该指令键(字母/数字复合键),在出现该指令字母后,系统自动进入插入模式。
3.3.3删除字符或指令段
如果某段指令数值需要删除一部分,将光标移到该处,按下删除键就可以删除该字符(空格处不能删除)。
如果删除的是指令,也就是字母,其结果是删除整段指令(连字母带其后跟数字一起删除)。
删除过字符的语句必须按ENTER键确认后才有效保存。
如果在按ENTER键时整个语句已近是空行,则整条语句被删除。
3.3.4插入新程序行
在检查程序的过程中,如果打算在两个程序行之间插入新的程序行,只需要输入一个介于两个程序行之间的新程序号,就可以像输入新程序一样输入一行新程序。
例如:
N0010G01X+12.345F1000
N0020G26F2000
N0030M02
现打算在N0010和N0020行之间插入一行新程序N0015,有两种方式。
方式一:
在行命令状态下,直接输入待插入的行号
N/PX/1W/5ENTER:
图15:
行命令状态,准备插入新的程序行(N0015)
系统直接进入行编辑状态,直接输入新程序即可。
图16:
行编辑状态,插入新的程序行
方式二:
已经在行编辑状态下,直接输入
N/PX/1W/5ENTER,也可以进入插入新行状态(图16)。
程序输入完以后,系统自动返回到行命令状态。
3.3.5删除程序行
如果打算删除一行程序,有三种方式。
方式一:
在行命令状态下,输入要删除的程序行号,再按删除键(不能删除一行不存在的程序)。
例如打算删除上例中的第二行N0020,按照如下操作:
N/PZ/2G/0删除。
方式二:
在行编辑状态下,用上下箭头找到要删除的行号,或用输入行号的方式找到该行,然后长按删除键就可以删除本行。
方式三:
在行编辑状态下,如果已经用删除键删除了所有指令,只剩下空行,按下ENTER键,本行将被删除。
图17:
行号N0020已经被删除
3.4删除已有工件程序
(1)删除当前工件程序:
在行命令状态下,键入“N9999999”再按删除。
(2)删除另一个工件程序:
在行命令状态下,先选择工件号Pxx,例如P02:
长时间
N/PZ/0Z/2ENTER,再键入“N9999999”再按删除。
图18:
准备删除整个工件程序
这时,系统会出现提示,要求操作者确认。
如果确认打算删除工件按ENTER键,否则按ESC键取消。
这样的目的是为了防止误删除工件程序。
删除工件后,右上角的目录栏中的数字有相应变化。
3.5删除所有工件程序
在行命令状态,键入“P9999999”再按删除,将会删除全部工件程序:
图19:
准备删除全部工件程序
这时,系统会出现提示,要求操作者确认。
如果确认打算删除工件按ENTER键,否则按ESC键取消。
这样的目的是为了防止误删除工件程序。
删除工件后,右上角的目录栏中的数字有相应变化。
4系统参数
ENC-2TE型控制系统有一些有用的系统参数,关系到电机的运动属性和吐出胶水时的时序匹配。
4.1参数种类
4.1.1参数0:
出胶提前
说明:
由于胶水在离开混胶头后到达工件需要一定时间,所以胶头在开始图形运动之前,有必要提前吐出胶水。
只有在这个时间延时递减到0时,胶头才开始运动。
属性:
0.01-0.99单位:
秒
4.1.2参数1:
循环次数
说明:
设置一个加工批次的数量。
在这个加工批次内,系统自动循
环执行。
批次计数递减为0后,系统停止运行。
属性:
1–9999单位:
件/批
4.1.3参数2:
左路延迟
说明:
由于左路胶水与右路胶水的理化特性有区别,容易导致出胶时的混合比发生问题,所以有必要分别调整两路的起始出胶时间。
属性:
0.00–0.99单位:
秒
4.1.4参数3:
右路延迟
说明:
同上
属性:
同上
4.1.5参数4:
出胶限时
说明:
设定吐胶的持续时间。
在设定的出胶限时内,混胶头连续吐出胶水。
时间递减到0时,停止出胶。
这个时间应该设定得略短于图形运动时间,这样,在图形运动结束时,由于管路特性所引起的吐胶迟后也正好结束。
属性:
0.01–99.00单位:
秒
4.1.6参数5:
间隔延时
说明:
每执行一次吐胶操作后,在开始下一次吐胶操作前的等待时间。
属性:
0.1–9.0单位:
秒
4.1.7参数6:
X/Z方向
说明:
通过软定义方式修改电机的运动方向,使之与理论运动方向相一致。
属性:
+同向/-反向
4.1.8参数7:
气/液延时
说明:
清洗混胶头时,气洗和液洗的持续时间。
属性:
1–9单位:
秒
4.1.9参数8:
X零点
说明:
系统在找到绝对零点后,X方向的偏移距离,这一点可以作为加工程序的起始点。
属性:
0–999.0单位:
毫米
4.1.10参数9:
Z零点
说明:
系统在找到绝对零点后,Z方向的偏移距离,这一点可以作为加工程序的起始点。
属性:
0–999.0单位:
毫米
4.1.11参数10:
X偏移
说明:
在准备清洗混胶头时,X方向运动到指定位置,以方便清洗。
属性:
0–2000单位:
毫米
4.1.12参数11:
Z偏移
说明:
在准备清洗混胶头时,Z方向运动到指定位置,以方便清洗。
属性:
0–2000单位:
毫米
4.1.13参数12:
手动速度
说明:
手工移动胶头时的速度
属性:
±0.02,±0.10,±1.00,±+10.0增量,每按键一次运
动指定长度;单位:
毫米/每次
1000,2000,3000,4000,5000,6000连续运动。
单位:
毫米/分钟
4.1.14参数13:
回零速度
说明:
胶头返回零点时的速度
属性:
0500,1000,2000,3000,3500,4000,4500,5000
5500,6000。
单位:
毫米/分钟
4.1.15参数14:
加速等级
说明:
胶头运动时的加速度。
属性:
10K,20K,30K,40K,50K,60K单位:
毫米/秒*秒
4.1.16参数15:
工作限速
说明:
限制胶头运动时的速度,
属性:
4000–9000单位:
毫米/秒
4.1.17参数16:
报警延时
说明:
在较长时间不工作时,为了防止混胶头中的胶水凝固,系统每隔一段时间发出声响报警以提醒操作者采取必要措施。
属性:
1-10单位:
分钟
4.1.18参数17:
拐角提前
说明:
在矩形图形加工中,可以使拐角过渡更加柔和
属性:
1–9单位:
毫米
4.2参数检查及修改
在运行模式或编辑模式,长时间按住参数键就进入参数设定状态。
见图8
此时按下箭头键可以向上下左右各方向选择参数号,被选中的参数号会以反白模式显示。
按数字键就可以修改参数值,修改完成后,按确认键确认输入。
长按ESC键可以返回运行模式。
5准备运行加工程序
5.1准备加工
在运行模式下(见图8),可以选择待运行的加工程序。
方法是按下N/P键。
光标就会移动到屏幕左上角的工件号栏。
输入工件号后,按ENTER键确认。
一旦选择好了工件号,该工件的前4行会显示在屏幕上部的小窗口中。
主计数表示累计加工过的工件数量(不可清零),副计数表示一个批次所加工过的工件数量(可以清零)。
X坐标值右方的手型符号后面的数值,表示手动速度,含义见4.1.13。
Z坐标值右方的“零点”标志表示当前位置是程序起始点。
如果不在程序起始点,“零点”标志会消失。
5.2修改当前坐标值
在运行模式,如打算修改当前坐标,只需键入打算修改的坐标值即可。
例如将当前坐标修改成X54.321,须如下操作:
长按X/1键,光标出现在“X”栏:
W/5U/4L/.S/3Z/2X/1ENTER
坐标值立即得到修改。
如果想修改Z坐标值(如Z123.45),只需长按Z/2键,光标就会出现在“Z”坐标栏,如下操作即可:
X/1Z/2S/3L/.U/4W/5ENTER。
5.3手动移动坐标
在运行模式,按←键将使X轴负向位移,按→键将使X轴正向位移;按↑键将使Z轴正向位移,按↓键将使Z轴负向位移。
运动的速度由参数12确定,也可以在面板上临时由手工设定,见下节。
5.4设定手动速度
在手动移动坐标前可以选定手动速度。
方法是:
先按F/6键,再按一个数字键1–9,这时目标速度将出现在X坐标值右方手型符号后面,含义如同参数12(4.1.13)。
当开始手动移动坐标时,将按照选定的速度运动。
数字0:
0.02mm(增量)数字1:
0.10mm(增量)
数字2:
1.0mm(增量)数字3:
10.0mm(增量)
数字4:
100mm/分(连续)数字5:
200mm/分(连续)
数字6:
500mm/分(连续)数字7:
1000mm/分(连续)
数字8:
2000mm/分(连续)数字9:
3000mm/分(连续)
5.5检查及设定程序起始点
检查及设定程序起始点可以在参数模式中通过修改参数8和参数9完成,参见4.2节。
也可以在面板上临时由手工设定。
如果打算将当前位置设为程序起始点,可以长按坐标设置键超过3秒钟,这时系统会出现提示,要求操作者确认。
这样做的目的是为了防止无意间误改程序起点。
5.6检查输入输出状态
在运行模式待机状态下,可以手动检查输入输出状态。
长按M/8键
系统显示:
图20:
检查输入输出状态
这时,输入栏的十二个“1”对应着十二个输入点状态,只要有输入信号的变化,对应位就会变化。
如果此刻键入1—8键,输出栏对应的1–8号继电器也会动作,屏幕左下角的工作点的状态也会相应变化。
5.7自动返回程序起点
按下手动回零键电机将自动运转返回程序起始点。
加速度固定为10K,
回零速度由参数13指定。
5.8自动寻找机械参考点
按下机械原点键超过3秒钟,电机将自动在全行程范围内负方向运行
寻找机械参考点,加速度固定为10K,速度由参数13指定。
找到机械参考点
后减速停车并正向低速再次寻找直到参考点输入状态再次发生变化为有效。
确定参考点后,坐标会自动按照参数8和参数9所规定的方向和长度做偏移
运动,偏移结束后,坐标被自动清零并被认定为程序起点。
如果在全行程
中没有找到参考点则会报错。
只有用ESC或///键才能解除。
5.9计数器清零
长按计次清零键将准备清除副计数器。
系统会要求操作者予以确认。
按ENTER键确认清零,按ESC键取消。
5.10清洗混胶头
在运行模式待机状态下,长按清洗偏移键将开始清洗混胶头。
这时,混胶头会按照参数10和参数11指定的方向和距离开始偏移,偏移速度等同回零速度。
偏移到位后,系统等待脚踏输入信号,这样做的目的是为了使操作者有时间做好清洗准备,防止污染工作台面。
一旦有了脚踏信号,则按照参数7规定的气洗/液洗时间,进行如下操作:
气洗液洗气洗液洗气洗
清洗结束后,混胶头会自动回到开始偏移之前的位置。
6开始运行加工程序
6.1选择加工程序号并运行
在待机状态下选定工件号N/P数字数字ENTER可以选择加工程序,再按下启动键就将开始运行加工程序。
如果不输入工件号,则运行最近一次运行过的加工程序。
图21:
运行加工程序示意
此时屏幕上显示的都是有关当前加工程序的内容。
屏幕上部的小窗口中显示的是当前的待执行的4行加工程序,以高亮状态显示的行号就是当前行。
“X”栏后边的F标志指示当前的运行速度。
各坐标的数值随着电机的运转而实时变化。
6.2加工程序结束
加工程序遇到“M02”指令时停止运行。
如果电机坐标回到程序起始
点则在Z坐标栏后出现“零点”提示,可以再次启动加工程序,否则会出
现“零点错误”提示信息,只能用ESC键或///键解除。
6.3加工程序的循环启动
加工程序遇到“M10”或“M20”指令时停止运行。
如果电机坐标回到
程序起始点则在Z坐标栏后出现“零点”提示,系统会在执行间隔延时
(参数5)后再次启动加工程序,否则会出现“零点错误”提示信息,只能用
ESC键或///键解除。
(“M10”与“M20”的区别在于“M10”会增加计数
器数值而“M20”不会)
6.4手动停止运行加工程序
如果加工程序以循环指令“M10”或“M20”结尾,那么在运行过程中,按下停止键,系统会在执行到循环指令时不
 升级会员
升级会员 