材料成型基本原理课后答案.docx
《材料成型基本原理课后答案.docx》由会员分享,可在线阅读,更多相关《材料成型基本原理课后答案.docx(31页珍藏版)》请在冰豆网上搜索。
材料成型基本原理课后答案
第十三章思考与练习
简述滑移和孪生两种塑性变形机理的主要区别。
答:
滑移是指晶体在外力的作用下,晶体的一部分沿一定的晶面和晶向相对于另一部分发生相对移动或切变。
滑移总是沿着原子密度最大的晶面和晶向发生。
孪生变形时,需要达到一定的临界切应力值方可发生。
在多晶体内,孪生变形是极其次要的一种补充变形方式。
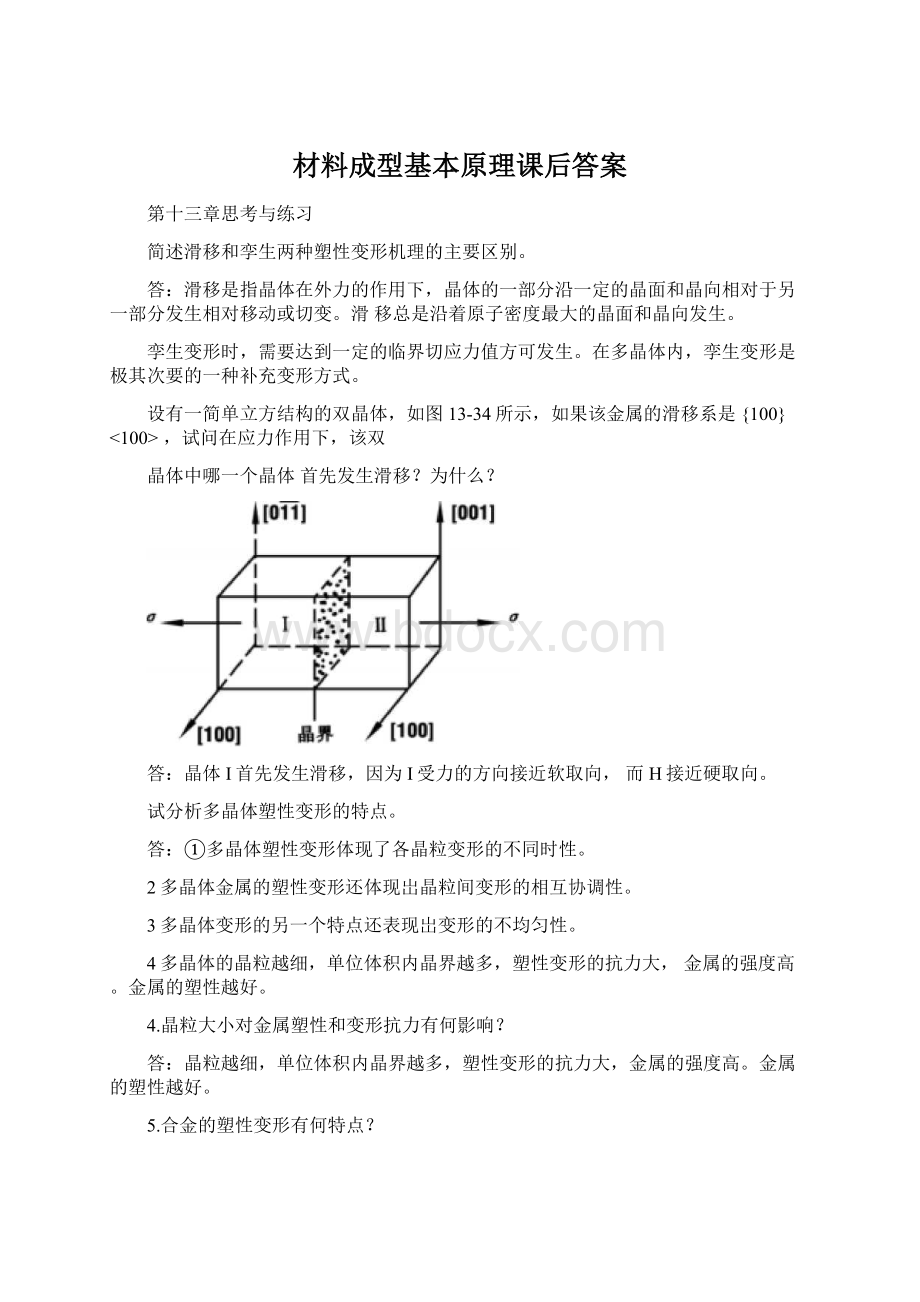
设有一简单立方结构的双晶体,如图13-34所示,如果该金属的滑移系是{100}<100>,试问在应力作用下,该双
晶体中哪一个晶体首先发生滑移?
为什么?
答:
晶体I首先发生滑移,因为I受力的方向接近软取向,而H接近硬取向。
试分析多晶体塑性变形的特点。
答:
①多晶体塑性变形体现了各晶粒变形的不同时性。
2多晶体金属的塑性变形还体现岀晶粒间变形的相互协调性。
3多晶体变形的另一个特点还表现岀变形的不均匀性。
4多晶体的晶粒越细,单位体积内晶界越多,塑性变形的抗力大,金属的强度高。
金属的塑性越好。
4.晶粒大小对金属塑性和变形抗力有何影响?
答:
晶粒越细,单位体积内晶界越多,塑性变形的抗力大,金属的强度高。
金属的塑性越好。
5.合金的塑性变形有何特点?
答:
合金组织有单相固溶体合金、两相或多相合金两大类,它们的塑性变形的特点不相同。
单相固溶体合金的塑性变形是滑移和孪生,变形时主要受固溶强化作用,
多相合金的塑性变形的特点:
多相合金除基体相外,还有其它相存在,呈两相或多相合金,合金的塑性变形在很大程度上取决于第二相的数量、形状、大小和分布的形态。
但从变形的机理来说,仍然是滑移和孪生。
根据第二相又分为聚合型和弥散型,第二相粒子的尺寸与基体相晶粒尺寸属于同一数量级时,称为聚合型两相合金,只有当第二相为较强相时,才能对合金起到强化作用,当发生塑性变形时,首先在较弱的相中发生。
当第二相以细小弥散的微粒均匀分布于基体相时,称为弥散型两相合金,这种弥散型粒子能阻碍位错的运动,对金属产生显着的强化作用,粒子越细,弥散分布越均匀,强化的效果越好。
6.冷塑性变形对金属组织和性能有何影响?
答:
对组织结构的影响:
晶粒内部岀现滑移带和孪生带;
晶粒的形状发生变化:
随变形程度的增加,等轴晶沿变形方向逐步伸长,当变形量很大时,晶粒组织成纤维状;
晶粒的位向发生改变:
晶粒在变形的同时,也发生转动,从而使得各晶粒的取向逐渐趋于一致(择优取向),从而形
成变形织构。
对金属性能的影响:
塑性变形改变了金属内部的组织结构,因而改变了金属的力学性能。
随着变形程度的增加,金属的强度、硬度增加,而塑性和韧性相应下降。
即产生了加工硬化。
7.产生加工硬化的原因是什么?
它对金属的塑性和塑性加工有何影响?
答:
加工硬化:
在常温状态下,金属的流动应力随变形程度的增加而上升。
为了使变形继续下去,就需要增加变形外力或变形功。
这种现象称为加工硬化。
加工硬化产生的原因主要是由于塑性变形引起位错密度增大,导致位错之间交互作用增强,大量形成缠结、不动位错等障碍,形成高密度的“位错林”,使其余位错运动阻力增大,于是塑性变形抗力提高。
8.什么是动态回复?
动态回复对金属热塑性变形的主要软化机制是什么?
答:
动态回复是层错能高的金属热变形过程中唯一的软化机制。
对于层错能高的金属,变形位错的交滑移和攀移比较容易进行,位错容易在滑移面间转移,使异号位错互相抵消,其结果是位错密度下降,畸变能降低,达不到动态再结晶所需的能量水平。
9.什么是动态再结晶?
影响动态再结晶的主要因素有哪些?
答:
在热塑性变形过程中,层错能低的金属在变形量很大时,当加热升温时,原子具有相当的扩散能力,变形
后的金属自发地向低自由能状态转变,称为动态再结晶。
影响动态再结晶的主要因素有:
金属的层错能高低,晶界迁移的难易程度有关。
10.什么是扩散性蠕变?
它的作用机理是什么?
答:
扩散蠕变是在应力场作用下,由空位的定向移动引起的。
它的作用机理是在一定温度下,晶体中总存在一定数量的空位。
显然,空位旁边的原子容易跳入空位,相应地在原子占据的结点上出现新的空位,相当于空位朝原子迁移的相反方向迁移。
在应力场作用下,受拉应力的晶界的空位浓度高于其它部位的晶界,由于各部位空位的化学势能差,而引起空位的定向转移,即空位从垂直于拉应力的晶界析出,而被平行于拉应力的晶界所吸收。
11.钢锭经热加工变形后的组织和性能发生什么变化?
答:
组织和性能发生什么变化:
①改善晶粒组织②锻合内部缺陷③形成纤维状组织④•改善碳化物和夹杂物分布⑤改善偏析。
12.杂质元素和合金元素对钢的塑性有何影响?
答:
杂质元素,如P、S、NH、0等,合金元素Si、MnCr、Ni、WMoVTi等。
对金属塑性的影响主要
表现为:
1碳碳对碳钢性能的影响最大。
碳能固溶于铁,形成铁素体和奥氏体,它们具有良好的塑性。
当铁中的碳含量超
过其溶碳能力时,多余的碳便以渗碳体Fe3C形式出现,它具有很高的硬度,而塑性几乎为零。
2磷磷是钢中的有害杂质,在钢中有很大的溶解度,易溶于铁素体,使钢的塑性降低,在低温时更为严重,这种现象称为冷脆性。
。
此外,磷具有极大的偏析倾向,能促使奥氏体晶粒长大。
3硫硫是钢中的有害物质,主要与铁形成FeS,FeS与铁形成易熔共晶体Fe-FeS,产生“热脆”现象。
4氮氮在钢中主要以氮化物Fe4N形式存在。
在3000C左右加工,会出现所谓的“蓝脆”现象。
5氢、氧氧在钢中溶解度很小,主要以Fe304AI2O3和SiO2等夹杂物出现,降低钢的塑性;Fe3O4还与FeS形
成易熔共晶体,分布于晶界处,造成钢的热脆性。
钢中溶氢,会使钢的塑性、韧性下降,造成所谓“氢脆”。
6锰作用之一是显着提高铁素体强度;作用之二是脱硫,锰与硫化合生成MnS以消除FeS的热脆现象。
7锡、铋、铅、锑、砷这几种低熔点合金元素在钢中的溶解度很低,它们在钢中以纯金属相存在于晶界,易造成钢的热脆性。
8稀土元素钢中加入少量稀土元素可以改善钢的塑性,但加入过量的稀土元素会在晶界处析出,反而会降低塑性。
13.组织状态、变形温度应变速率对金属塑性有何影响?
答:
组织状态状态对金属塑性的影响:
当金属材料的化学成分一定时,组织状态的不同,对金属的塑性有很大影
响。
⑴晶格类型的影响,面心立方(滑移系12个)的金属塑性最好;体心立方晶格(滑移系12个)塑性次之,密排六方
晶格的金属塑性更差。
⑵晶粒度的影响,晶粒度越小,塑性越高,晶粒度均匀的塑性好,晶粒大小相差悬殊的多晶体,各晶粒间的变形难易程度不同,造成变形和应力分布不均匀,所以塑性降低。
⑶相组成的影响,当合金元素以单相固溶体形式存在时,金属的塑性较高;当合金元素以过剩相存在时,塑性较低。
⑷铸造组成的影响,铸造组织具有粗大的柱状晶粒,具有偏析、夹杂、气泡、疏松等缺陷,因而塑性较差。
变形温度对金属塑性的影响:
对大多少金属而言,总的趋势是随着温度升高,塑性增加。
但是这种增加并不是线性的,在加热的某些温度区间,由于相态或晶界状态的变化而出现脆性区,使金属的塑性降低。
(蓝脆区和热脆区)
应变速率对金属塑性的影响:
应变速率可以理解成变形速度,提高应变速率,没有足够的时间进行回复或再结晶,对金属的软化过程不能充分体现,使金属塑性降低。
但提高应变速率,在一定程度上使金属温度升高,温度效应增加,温度的升高可以促使变形过程中的位错重新调整,有利于金属塑性提高;提高应变速率可以降低摩擦因数,从而降低金属的的流动阻力,改善金属的充填性。
而且,在非常高的应变速率下(如爆炸成形)对塑性较差的难成形金属的塑性加工
是有利的。
14.化学成分、组织状态、变形温度、变形程度对变形抗力有何影响?
答:
化学成分:
对于纯金属,纯度越高,变形抗力越小。
对于合金,主要取决于合金元素的原子与基体原子间相互
作用的特性、合金原子在基体原子中的分布等有关。
合金元素引起基体点阵畸变程度越大,金属的变形抗力也越大。
组织状态:
退火状态下,金属和合金的变形抗力会大大降低。
组织结构的变化,例如发生相变时,变形抗力也发生变化。
一般地说,硬而脆的第二相在基体相晶粒内呈颗粒状弥散分布时,合金的变形抗力就高;且第二相越细,分布越均匀,数量越多,变形抗力就越大。
金属和合金的晶粒越细,同一体积内的晶界越多,在室温下由于晶界强度高于晶内,所以变形抗力就高。
变形温度:
变形抗力一般都随温度的升高而降低。
变形程度:
变形程度的增加,只要回复和再结晶过程来不及进行,必然会产生加工硬化,使继续变形发生困难,因
而变形抗力增加。
但当变形程度较高时,随着变形程度的进一步增加,变形抗力的增加变得比较缓慢,因为这时晶格畸变能增加,促进了回复与再结晶过程的进行,以及变形热效应的作用加强。
15.应力状态对金属的塑性和变形抗力有何影响?
答:
塑性:
金属在外力作用下发生永久变形而不破坏其完整性的能力。
应力状态不同对塑性的影响也不同:
主应力图中压应力个数越多,数值越大,则金属的塑性越高;拉应力个数越多,数值越大,则金属的塑性就越低。
这是由于拉应力促进晶间变形,加速晶界破坏,而压应力阻止或减小晶间变形;另外,三向压应力有利于抑制或消除晶体中由于塑性变形而引起的各种微观破坏,而拉应力则相反,它使各种破坏发展,扩大。
变形抗力:
变形抗力:
金属在发生塑性变形时,产生抵抗变形的能力,称为变形抗力,一般用接触面上平均单位面积变形力表
示
应力状态不同,变形抗力不同。
如挤压时金属处于三向压应力状态,拉拔时金属处于一向受拉二向受压的应力状态。
挤压时的变形抗力远比拉拔时变形抗力大。
16.什么是金属的超塑性?
超塑性变形有什么特征?
答:
在一些特定条件下,如一定的化学成分、特定的显微组织、特定的变形温度和应变速率等,金属会表现岀异乎寻常的高塑性状态,即所谓超常的塑性变形。
超塑性效应表现为以下几个特点:
大伸长率、无缩颈、低流动应力、对应变速率的敏感性、易成形。
17.解释超塑性变形的机理。
答:
超塑性变形行为是很复杂的,变形机理也还处在研究探索之中。
目前有这样几种解释:
①晶界滑移的作用;②扩散蠕变的作用;③动态回复和动态再结晶的作用。
19.什么是温度效应?
冷变形和热变形时变形速度对塑性的影响有何不同?
温度效应:
由于塑性变形过程中产生的热
量使变形体温度升高的现象。
(热效应:
塑性变形时金属所吸收的能量,绝大部分都转化成热能的现象)一般来说,冷变
形时,随着应变速率的增加,开始时塑性略有下降,以后由于温度效应的增强,塑性会有较大的回升;而热变形时,随着应变速率的增加,开始时塑性通常会有较显着的降低,以后由于温度效应的增强,而使塑性有所回升,但若此时温度效应过大,已知实际变形温度有塑性区进入高温脆区,则金属的塑性又急速下降。
14思考与练习
1.什么叫张量?
张量有什么性质?
答:
张量:
由若干个当坐标系改变时满足转换关系的分量组成的集合,称为张量,需要用空间坐标系中的三个矢
量,即9个分量才能完整地表示。
它的重要特征是在不同的坐标系中分量之间可以用一定的线性关系来换算。
基本性质:
f(Pij)
1)张量不变量张量的分量一定可以组成某些函数',这些函数值与坐标轴无关,它不随坐标而改变,这样
的函数,叫做张量不变量。
二阶张量存在三个独立的不变量。
2)张量可以叠加和分解几个同阶张量各对应的分量之和或差定义为另一个同阶张量。
两个相同的张量之差定义为零张量。
p..=p..
3)张量可分为对称张量、非对称张量、反对称张量若张量具有性质iJJi,就叫对称张量;若张量具有性质
PJ平‘
PiJJi,且当i=J时对应的分量为0,则叫反对称张量;如果张量,就叫非对称张量。
任意非对称张量可以
分解为一个对称张量和一个反对称张量。
如果以主轴为坐标轴,则两个下角标不同的分量均为零,只留下两个
4)二阶对称张量存在三个主轴和三个主值下角标相同的三个分量,叫作主值。
2.如何表示任意斜微分面上的应力?
答:
若过一点的三个互相垂直的微分面上的九个应力分量已知,则借助静力平衡条件,该点任意方向上的应力分量可以确定。
如图14-1所示,设过Q点任一斜切面的法线N与三个坐标轴的方向余弦为l,mn,
2o2卫2
斜切微分面上的切应力为S(14-8)
所以,已知过一点的三个正交微分面上9个应力分量,可以求出过该点任意方向微分面上的应力,也就是说,这9
个应力分量可以全面表示该点应力状况,亦即可以确定该点的应力状态。
3.应力张量不变量如何表达?
答:
应力张量的三个不变量为
其中J1、J2、J3为应力张量第一、第二、第三不变量。
4.应力偏张量和应力球张量的物理意义是什么?
答:
应力:
在外力的作用下,变形体内各质点就会产生相互作用的力,称为内力。
单位面积上的内力称为应力,可采用截面法进行分析
应力球张量:
也称静水应力状态,其任何方向都是主方向,且主应力相同,均为平均应力。
特点:
在任何切平面上都没有切应力,所以不能使物体产生形状变化,而只能产生体积变化,即不能使物体产生塑性变形。
应力偏张量:
是由原应力张量分解岀应力球张量后得到的。
应力偏张量的切应力分量、主切应力、最大切应力及应
力主轴等都与原应力张量相同
特点:
应力偏张量只使物体产生形状变化,而不能产生体积变化。
材料的塑性变形是由应力偏张量引起的。
5.平面应力状态和纯切应力状态有何特点?
答:
平面应力状态的特点为:
变形体内各质点与某坐标轴垂直的平面上没有应力。
纯切应力状态:
6.等效应力有何特点?
写岀其数学表达式。
答:
等效应力的特点:
等效应力不能在特定微分平面上表示岀来,但它可以在一定意义上“代表”整个应力状态中的偏张量部分,因而与材料的塑性变形密切有关。
人们把它称为广义应力或应力强度。
等效应力也是一个不变量。
其数学表达式如下:
等效应力在主轴坐标系中定义为
在任意坐标系中定义为
7.
已知受力物体内一点的应力张量为
解:
设全应力为S,sx,Sy,Sz分别为S在三轴中的分量,
则有:
sX1X1汉丄
y=502+02-75■■-2=-28.0
则得到•=108.7MPa
8.已知受力体内一点的应力张量分别为
10
0
-10
巧=
0
-10
0
①
厂10
0
10
q
172
0
W-
172
0
0
②
<0
0
100y
50
50
80
=
50
0
—75
凹
—75
-30.
(MPa,
J1=X+'-y+;「z=10
I1
代入公式对于1=20时:
对于二2=0时:
对于_3=—10时:
主切应力
12
最大切应力
等效应力:
(;-1-;-2)2(-2,(;-3-;-1)2=3」2
应力偏张量:
-101
—10
20
3
1©+6+丁3)](20+0_10)=10
-m=3=3
应力球张量:
40
z二•yz二-zx—0
13也应是单值的,所以将丨1、12、13称为应变张量不变量。
;1、;2、;3表示主应变,则主应变
V。
等效应变又称广义应
4.应变张量和应变偏张量有何关系?
答:
应变张量与应力张量具有同样的性质,主要有:
(1)存在三个互相垂直的主方向,在该方向上线元只有主应变而无切应变。
用张量为
主应变可由应变状态特征方程
求得。
(2)存在三个应变张量不变量h、12、13,且
对于塑性变形,由体积不变条件,丨1=°
(3)在与主应变方向成45方向上存在主切应变,其大小为
―-尹1-),23九汀2「3),31九汀3「°
若d>;2>;3,则最大切应变为
(4)应变张量可以分解为应变球张量和应变偏张量
1
名m十%十^)
式中,3为平均应变;
"ij为应变偏张量,表示变形单元体形状变化;
rm为应变球张量,表示变形单元体体积变化。
(5)存在应变张量的等效应变
=326I2
等效应变的特点是一个不变量,在数值上等于单向均匀拉伸或均匀压缩方向上的线应变变,在屈服准则和强度分析中经常用到它
(6)与应力莫尔圆一样,可以用应变莫尔圆表示一点的应变状态。
设已知主应变V、;2
5.小应变几何方程和变形协调方程各如何表示?
它们有何意义?
6.
答:
小应变几何方程:
物理意义:
表示小变形时位移分量和应变分量之间的关系,是由变形几何关系得到的,称为小应变几何方程,又称柯西几何方程。
如果物体中的位移场已知,则可由上述小应变几何方程求得应变场。
变形协调方程:
物理意义:
只有当应变分量之间满足一定的关系时,物体变形后才是连续的。
否则,变形后会岀现“撕裂”或“重叠”,变形体的连续性遭到破坏。
6.速度分量、位移增量、应变增量和应变速率增量是如何定义的?
答:
速度分量:
在塑性变形过程中,物体内各质点以一定的速度运动,形成一个速度场。
将质点在单位时间内的位移叫做位移速度,它在三个坐标轴方向的分量叫做位移速度分量,简称速度分量;
位移增量:
物体在变形过程中,在某一极短的瞬时dt,质点产生的位移改变量称为位移增量;
应变增量:
塑性变形是一个大变形过程,在变形的整个过程中,质点在某一瞬时的应力状态一般对应于该瞬时的应变增量;
7.对数应变有何特点?
它与相对线应变有何关系?
答:
对数应变特点:
对数应变适用于大变形;
叠加性设某物体的原长度为10,历经变形过程11、12到13,则总的对数应变为各分量对数应变之和,即
对应的各阶段的相对应变为
这表明,对数应变具有可叠加性,而相对应变不具有可叠加性。
(3)可比性对数应变为可比应变,相对应变为不可比应变。
假设将试样拉长一倍,再压缩一半,则物体的变形程度相同。
拉长一倍时
件1"2
压缩一半时
Fn^5^=—In21。
负号表示应变方向相反。
而用相对应变时,以上情况分别为因而,相对应变为不可比应变。
8.平面应变状态、轴对称应力状态各有什么特点?
答:
平面变形状态下的应力状态有如下特点:
⑴没有变形的z方向为主方向,该方向上的切应力为零,z平面为主平面,z为中间主应力,在塑性状态下,z
1
()--■-
z2科)m
等于平均应力,即2
⑵由于应力分量二X、二y、xy沿z轴均匀分布,与z轴无关,所有平衡微分方程与平面应力问题相同
⑶如果处于变形状态,发生变形的Z平面即为塑性流动平面,平面塑性应变状态下的应力张量可写成:
1口2
巧xy
0
0
0
2
0
0]
0
6
0
=
巧yx
12
0
+
0
<^m
0
2
0
0
O"1*O2
0
0
0
1°
0
口m/
2丿
或
1
丿
9.设一物体在变形过程中某一极短时间内的位移为
w=(2°-0.2xyz)10"试求:
点a(1,1,—1)的应变分量、应变球张量、应变偏张量、主应变、等效应变
Rm
先求三个应变张量不变量11
代入特征方程
;3—I^'—I2—=0可求。
=歪$(知一®)2十(名2—S)2+(名3—名1)2
然后根据
3
可求等效应变
10.试判断下列应变场能否存在:
匕=xy2,gy=x2y,%=xy,?
xy=0,?
yz=丄(z2+y),N=丄(x2+y2)
(1)22
(2);x=x2•y2,;y=y2,;z=0,刈=2xy,yz=zx=0
第十六章思考与练习
1.解释下列概念
条件应力;真实应力;理想塑性;弹塑性硬化;刚塑性硬化;Tresca屈服准则;Mises屈服准则;屈服轨迹;
面;等向强化。
答:
条件应力:
室温下在万能材料拉伸机上准静态拉伸(「:
:
210-/S)标准试样,记录下来的拉伸力P与试样标
距的绝对伸长剧之间的关系曲线称为拉伸图。
若试样的初始横截面面积为A0,标距长为10,则条件应力二。
A0
真实应力试样瞬时横截面A上所作用的应力Y称为真实应力,亦称为流动应力。
屈服准则是材料质点发生屈服而进入塑性状态的判据,也称为塑性条件。
Tresca屈服准则:
1864年法国工程师H.Tresca提出材料的屈服与最大切应力有关,即当材料质点中最大切应力达到某一定值时,该质点就发生屈服。
或者说,质点处于塑性状态时,其最大切应力是不变的定值,该定值取决于材料的性质,而与应力状态无关。
所以Tresca屈服准则又称为最大切应力不变条件,当ai>a2>a3时,则
密塞斯(VonMises)屈服准则:
即当等效应力达到定值时,材料质点发生屈服。
材料处于塑性状态时,其等效应
力是不变的定值,该定值取决于材料的性质,而与应力状态无关。
表达式如下:
常数C根据单向拉伸实验确定为as,于是Mises屈服准则可写成:
2.如何用单向拉伸试验绘制材料的真实应力-应变曲线?
有哪些常见的简化形式?
答:
①真实应力试样瞬时横截面A上所作用的应力Y称为真实应力,亦称为流动应力。
(16-2)
由于试样的瞬时截面面积与原始截面面积有如下关系:
YP(1*;)-;「0(1*;)
Ag
2真实应变设初始长度为10的试样在变形过程中某时刻的长度为I,定义真实应变为
1=1n丄二In(1;)
lg(16-4)
3真实应力-应变曲线在均匀变形阶段,根据式(16-3)和(16-4)将条件应力-应变曲线直接变换成真实应力-应
变曲线,即Y-匚曲线,如图16-2所示。
在b点以后,由于出现缩颈,不再是均匀变形,上述公式不再成立。
因此,b
点以后的曲线只能近似作岀。
一般记录下断裂点k的试样横截面面积Ak,按下式计算k点的真实应力-应变曲线。
Yk二电;:
=|n厶
Ak,Ak(16-5)
这样便可作出曲线的b'k'段。
但由于岀现缩颈后,试样的形状发生了明显的变化,缩颈部位应力状态已变为三向拉应力状态,实验表明,缩颈断
面上的径向应力和轴向应力的分布如图16-3。
颈缩边缘处受单向拉伸应力Y作用,中心处轴向拉伸应力大于Y,这一由于出现缩颈而产生的应力升高现象,称为“形状硬化”。
因此,必须加以修正。
齐别尔(E.Siebel)等人提出用下式对
大多数工程金属在室温下都有加工硬化,其真实应力-应变曲线近似于抛物线形状,如图16-5a,可用指数方程表
(16-8)
式中,B是强度系数;n是硬化指数。
B和n的值可用失稳点的特性确定如下,对上式求导数,得
又有Yb=B;:
b
比较上述两式,可得
_Yb,
;Jb
以判断屈服。
但该准则未考虑中间主应力b2的影响,而Miss屈服准则考虑了b2对质点屈服的影响。
匚1一匚3
 升级会员
升级会员 