北京交通大学自动控制理论实验报告.docx
《北京交通大学自动控制理论实验报告.docx》由会员分享,可在线阅读,更多相关《北京交通大学自动控制理论实验报告.docx(9页珍藏版)》请在冰豆网上搜索。
北京交通大学自动控制理论实验报告
姓名:
学号:
班级:
任课教师:
实验一一、二阶系统的电子模拟及时域响应的动态测试
1、一阶系统
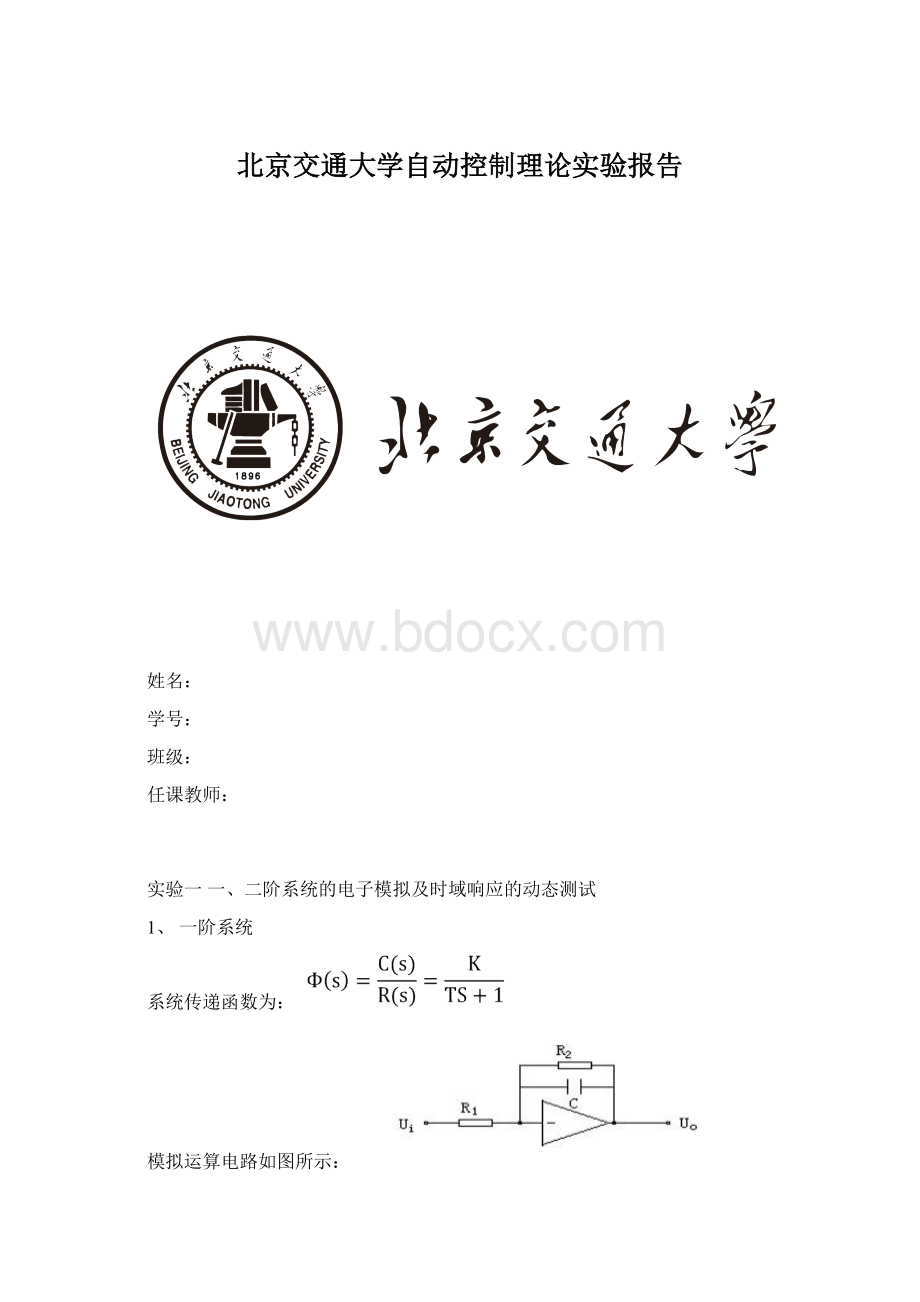
系统传递函数为:
模拟运算电路如图所示:
由图得:
在实验当中始终取R2=R1,则K=1,T=R2C,取不同的时间常数T分别为:
0.25、0.5、1,记录不同时间常数下阶跃响应曲线,测量并纪录其过渡过程时间Ts,将参数及指标填在表内:
T
0.25
0.5
1
R2
250KΩ
510KΩ
1MΩ
C
1μF
1μF
1μF
Ts实测
1.2S
2.2S
3.85S
Ts理论
1.25S
2.0S
3.5S
T=0.25
T=0.5
T=1.0
2、二阶系统
系统传递函数为:
令ωn=1弧度/秒,则系统结构如图所示:
根据结构图,建立二阶系统模拟线路图:
取
ζ取不同的值ζ=0.25,ζ=0.5,ζ=1观察并记录阶跃响应曲线,测量超调量σ%,计算过渡过程时间Ts,将参数及各项指标填入表内。
ζ
0.25
0.5
1.0
R4
2MΩ
1MΩ
1MΩ
C3
1μF
1μF
0.5μF
σ%实测
42%
16%
\
σ%理论
44.4%
16.3%
\
Ts实测
11.2S
5.75S
5.20S
Ts理论
11.3S
5.8S
5.25S
ζ=0.25
ζ=0.5
ζ=1.0
实验结论:
一阶系统:
当K确定后,系统的动态性能与T的值有关,T越大,调节时间越大,上升时间越大。
二阶系统:
当ωn确定后,系统的动态性能与阻尼比ζ的值有关,当ζ小于1的时候,系统出现振荡,且ζ越大,超调量越小,调节时间越小,振荡次数也越少;当ζ大于1时,系统将不出现振荡现象。
实验三控制系统串联校正
系统结构如图所示:
未加校正的系统模拟电路图如下图所示:
未加校正时,Gc(s)=1
加串联超前校正时Gc(s)=
给定a=2.44,T=0.26,则
叫串联滞后校正时Gc(s)=
(0给定b=0.12,T=83.33,则Gc(s)=
校正电路:
校正前:
理论图:
实际图:
电路参数:
R1=1MΩ,R2=1MΩ,R3=1MΩ,C1=1Μf,R4=250KΩ,R5=1MΩ,C2=1μF
超前校正后:
理论图:
实际图:
校正电路参数:
C=1μF,R4=260KΩ,R1=630KΩ,R2=100KΩ,R3=530KΩ
滞后校正后:
理论图:
实验结论:
超前校正能够提高截止频率,增加相角裕度,使调节时间减小;滞后校正能够减小截止频率,提高系统的相角裕度,对低频信号不产生衰减,而对高频噪声信号有削弱作用。
 升级会员
升级会员 