库卡机器人PROFIBUS配置方法.docx
《库卡机器人PROFIBUS配置方法.docx》由会员分享,可在线阅读,更多相关《库卡机器人PROFIBUS配置方法.docx(14页珍藏版)》请在冰豆网上搜索。
库卡机器人PROFIBUS配置方法
库卡机器人PROFIBU配置方法
1,
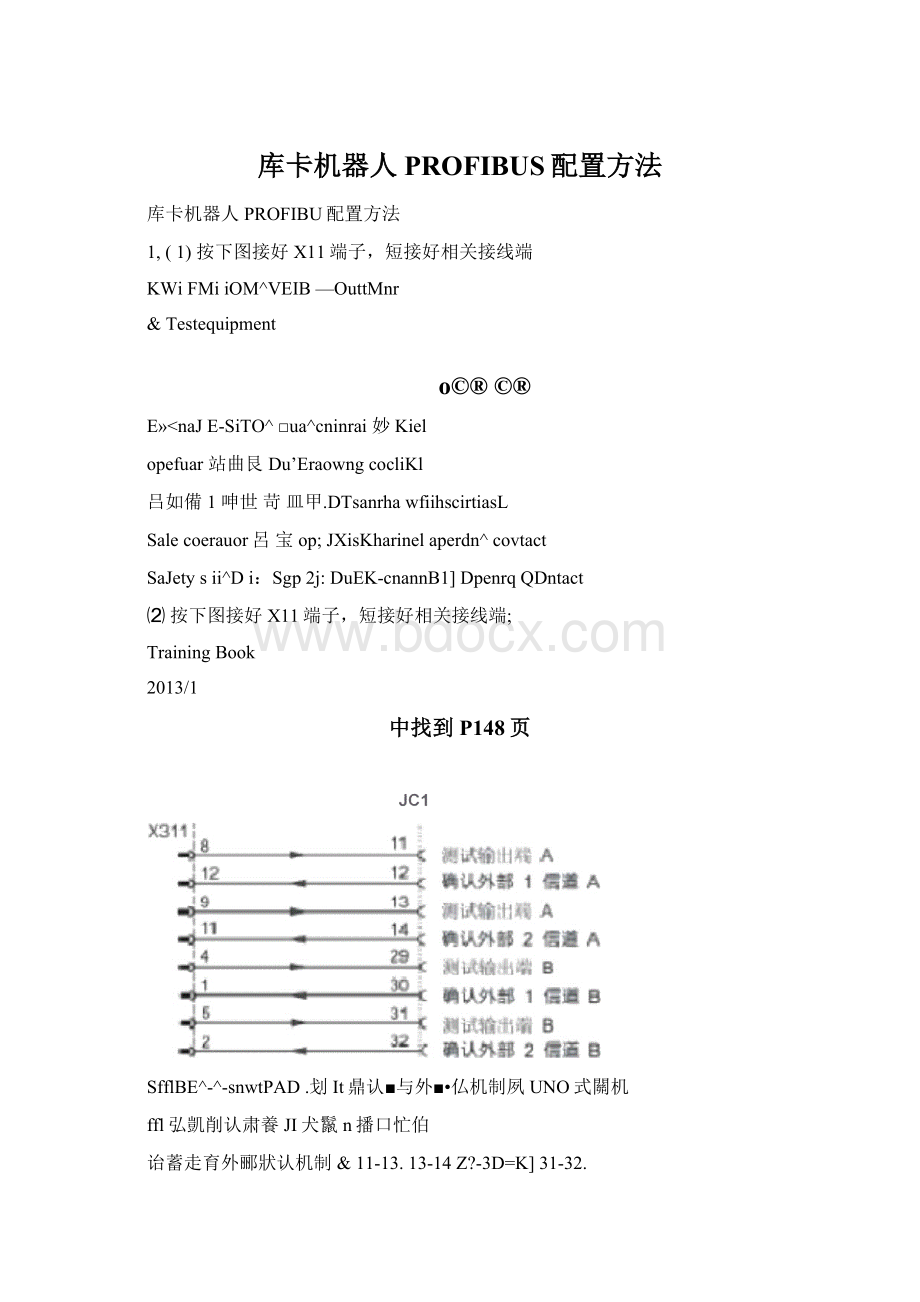
(1)按下图接好X11端子,短接好相关接线端
KWiFMiiOM^VEIB—OuttMnr
&Testequipment
o©®©®
E»opefuar站曲艮Du’EraowngcocliKl
吕如備1呻世苛皿甲.DTsanrhawfiihscirtiasL
Salecoerauor呂宝op;JXisKharinelaperdn^covtact
SaJetysii^Di:
Sgp2j:
DuEK-cnannB1]DpenrqQDntact
⑵按下图接好X11端子,短接好相关接线端;
TrainingBook
2013/1
中找到P148页
SfflBE^-^-snwtPAD.划It鼎认■与外■•仏机制夙UNO式關机
ffl弘凱削认肃養JI犬鬣n播口忙伯
诒蓄走育外郦狀认机制&11-13.13-14Z?
-3D=K]31-32.
YX11,则谊曲■人KK孫理创粗(XU、冋己审用
(*5IBt.
刘矗谟备疋整枝三若科E9.需1FH远一沖外曹料P和制】
两T料慕利乩孔制的曲辄抽下.
■外鄴调认机憎1it好T1或T2«式旳况莎醴亡豊■;■人利因霄
■界awa机刪2碣“■末处在義2憧at■入ax才音
idAESff-^wwiPAD.JMMHV■扁凤押劭潮凰UND氏■特.
X11
S49:
乳邮■认齐先標头飯W事:
ix卄
站倉曲有拆酿櫚认机制.蚩劭料■廿抑11*12.1,忖、23^30^31-32.
2,提示报警,在控制柜里面检查有一条电源线没有插
3,在机器人示教器上查找机器人ip地址,然后设置电脑本地连接的ip.
软件与机器人通讯连接起来(查看连接状态
:
CMD—PING_IP地址)
4,
通过
软件从机器人控制柜中读取配置
文件编関视图诙工具窗口?
WodcVisualProjec:
Ejtplorsr
Avti1alleceLls
讦ProjectStructure
:
Elarcwir^冷Ge(ftetry
Createtroiject
LJJ
Open^rojec:
然后将读取的项目“另存与”一个指定的文件夹。
5,关闭读取的项目,如图
_jFrQ]«tErf-nKture
FrmjI..L31”
L..-.21.5.sZEQ
Propvaiia-HTEniLCEJolas>&d.
聊锻舖^ZQiLcey
中插入GSD文
「WdrkV«u«i0«v-icw曲件世輯輒闭离和
”•MiLr・-U
t-ars工鼻
S5口*
一G上kru^tM
r■■.
Pro]*-d:
&4viik1:
urw
F孕H「
Z*kfcfcli#**■*二・#|Tll.«a
Tiy^scm-i*■*irehririQF€ilfr
S«*ia*d^veripipogtfi-14
Hr^yH.fe.
口*
飞WvikV-j«DH-nl-n^-nrwru■;
SFt洞為Mia£ait«s±4EJ?
备•仙訴U.£*H4弓址1
X丄一彳丘讥%
比Pro-jectStructure
仃早X
■*H旺■■占申Piles
"mpart匚已dtaription4ile
Dwis*>14«rripliitKfiLi*
IrcAgt
Devicedhwcriptian-file
kJlj亠只宙彷
1»Bk加兀葩心T_Xh4Li
+*f==】"”
ISF-
■三”H
A■.収除
A
iBF-fi
830期掩林
■M
二BeckdroffAX2™
2012/5/503;4t
XMLSE^i
自昼近嗣换3■
—ftrclc^cffBICxkice
2012/5/^0生班
XMLjfcSS
•%cJ曲offCUffiM
^012/5^0艸
XML
-Bectdro-ffEXxkjoe
20JL2/5/3D3;«56
XMLJJS
0w
—B«4d,icff^Kxxxsc
2012/S/^OSi4£
二际JddfEKxgD刚
XH2/5/M帥艷
XML
■XF"
兰BecfcbcfFELL™
2CK/5/3O
xwlJJH
111如
*SeddKiftEl2mxm
Xili/5/50鬧
XML如
ds^
二BeckWfILSkxa
2012/5/和3;4t
XWL3JS
—Ekrcl^cf?
£l_屯gd
ZDlJ/S/ifi3h4£
筑轴IL左宦
•4案克电”
!
«nurie.
=■ium'is.jc
W-ti■(!
畸TU.
4
HI
1
立"住.N..
■EkberCATESI”
価Q)”
需要把外挂的I/O模块配置好
6,打开读取的项目中,如图,
立件编揖咖EiH—工其窗口*
激活
7,先配置EL1809输入部分。
IN[1]到IN[16]对
应16点输入
Q■'KICl«Fil^+l|祀IFlbLiiHr-rAi
&CLOi|iuFifHlvun
F-id1CAe
'口”!
■』.・・r坤jAruJBf0,v1tqr'a
OElipid.
7Pipial也
1
2EUKhEutaui■口SeBorriLV吐f品•创
-总Hl£r?
3l-FMFEIlE7fSim
7EUTjl-OMCiiJmju?
miifzr^igoinLftffMUjKh,ikfc.OddattOE*
后配置EL2809输出部分。
OUT[1]到OUT[16]对
应16点输出;
*1EEaffiElhirfirrOBlBt>iii
■_jHfiT3J-tE]DFDFErE■QIm*
7turfIE-Alft1
JiIMdeIUliBifEifYEM¥.3mJtlSESPI竝|j|>7aLja.«it¥:
ELU
8,在依次配置EL6731-0010输入输出
注意把8位编组为一个字节,一次编组,从IN[17]和OUT[17]开始,最后连接起来。
9,下载项目.g•.*
在下载过程中若出现下载报警,可以在示教器上激活要下载的项目即可
沁I
ii辺a[軀胡川玦
个字的输入/输出
V£30-31
*CiitFd](rki幻〕
-r.n加伯他隠铁]
t5IthiHT
二tn引归咆张記-吗
-年lth-CK?
EHflUJOTUtf:
W口略si戲E-Jus
旳Be
EMkMlOPLOTC:
IfElm
=*扣讨屈10
H£+:
i®
BU3I&16L1書习朮怖远aiflB1眶litb上lim
Oeqs"iar.jwi如地凶FdfcnF:
w
Ukffl'Sl&eflrHii13\T'H疝
I^WSI&eflfNd;15、吭疆Mu恤h
师R【砸初u川券补
WUR【3wh-alnOJ
1JrlESaieC加枷乜1WDR)9aft0it4JaifiZ
3Y0朋伯讪樋航FD狐血He5W0R&命即讪济阳TF&射创注濟珂呗涮it徵
3呦FIT胡]止Hkb'他曲[軀韵川life
12在PLC中配置网络及地址,
•J用q.Fvnri%:
;:
冊―气tn隠
■Sgfli:
B.1rR.E曽巴®屮厂lOr*
■mHi
□i^i-°a砸i-呈•审d営籽
14心炷
«耐事»—砂I
51.1
nr
r-
*
11
甘憫WTijfli>ru
no
rw网
JMt
u嶼
4nU>.甘
2
ST
4rLMi.^m-iiIeil
注EEJ
3
T"
i
LjJ:
-jLill
r
peiUfli
條.
」
Mtt
RKOlE
当机器人与PLC通讯正常后,建立变量表
在示教器上可以监视强制相关数字信号,还可以在示教器上强制0UT[1]-0UT[16]会发现EL1809
模块亮灯;
 升级会员
升级会员 