S71200 PID Compact V2 常见问题.docx
《S71200 PID Compact V2 常见问题.docx》由会员分享,可在线阅读,更多相关《S71200 PID Compact V2 常见问题.docx(9页珍藏版)》请在冰豆网上搜索。
S71200PIDCompactV2常见问题
S7-1200PIDCompactV2常见问题
S7-1200的PID功能支持仿真吗?
S7-1200固件版本V4.0以上,TIAV13SP1以上,使用S7-PLCSIMV13SP1可以仿真PLC的程序,但不支持工艺功能(高速计数器、运动控制、PID调节)的仿真。
S7-1200系列PLC最多能实现多少PID回路的控制?
严格上说并没有具体数量的限制,实际应用中由以下因素决定数量:
1.CPU的存储区的占用情况,及支持DB块数量的限制。
2.在循环中断里调用PID指令,需要保证中断里执行指令的时间远小于该中断的循环时间。
当出现过程值超限错误时,如何使PID控制器不停止运行?
1.在PIDCompactV1版本时,当过程值超限,PID会自动切换到“未激活”模式,Error报错。
通过错误位上升沿捕捉错误代码是0001H(参数“Input”超出了过程值限值的范围),可以通过以下途径避免:
①在工艺对象PID的组态界面,修改过程值的限值,进行适当放大。
②程序中对反馈值进行比较,必须满足限值范围的再传送给Input。
可以在比较的过程中做个超限后的报警。
在PID_CompactV2>组态>高级设置>对错误的响应中,可以预先设置发生错误时PID的输出状态。
以便在发生错误时,控制器在大多数情况下均可保持激活状态。
以“反馈值超限”的错误为例,设置“对错误的响应”的不同模式,查看PID控制器的状态变化:
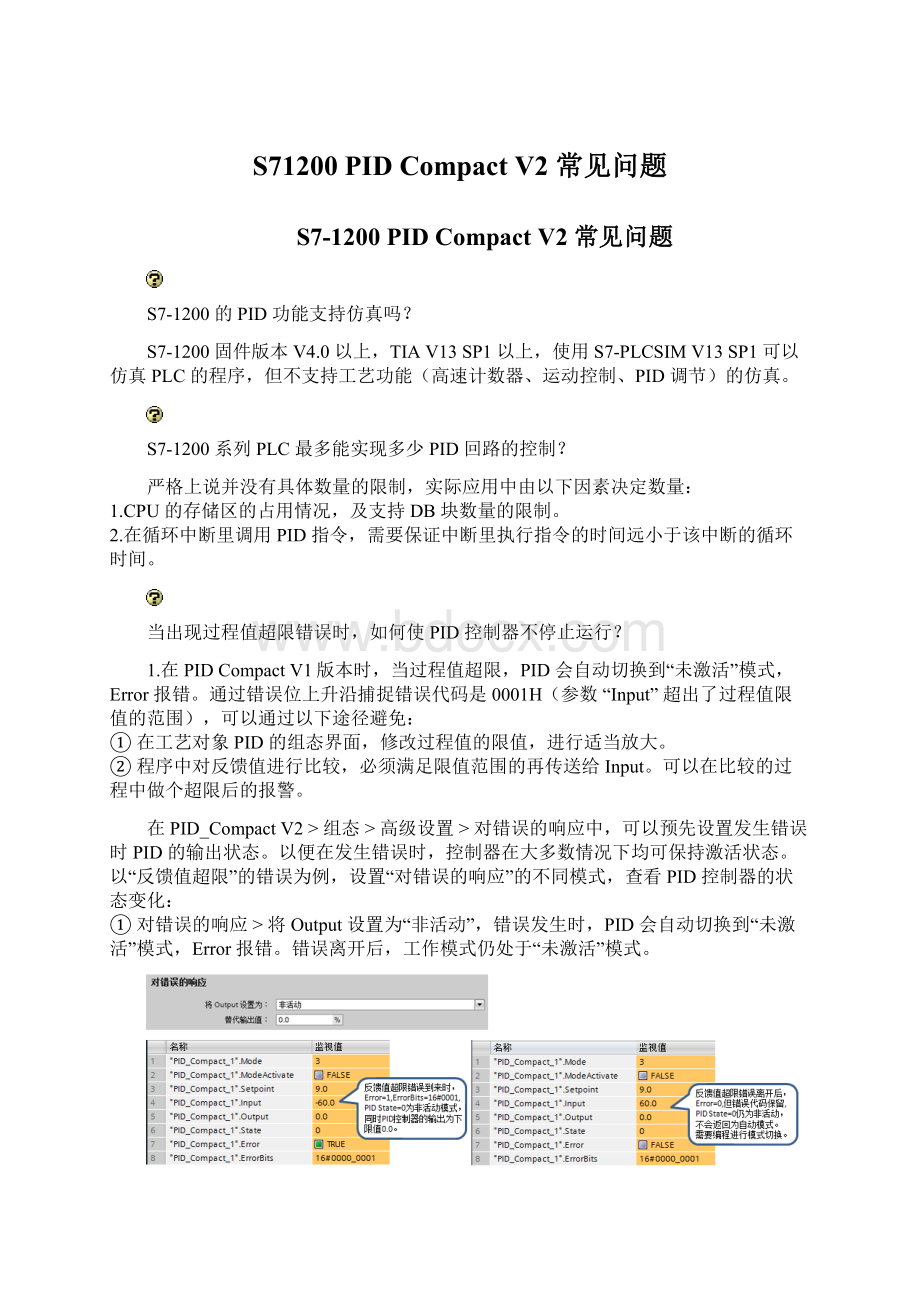
①对错误的响应>将Output设置为“非活动”,错误发生时,PID会自动切换到“未激活”模式,Error报错。
错误离开后,工作模式仍处于“未激活”模式。
图1.“非活动”错误响应_出现错误时PID控制器不活动
②对错误的响应>将Output设置为“错误待定时的当前值”或“错误未决时的替代输出值”,错误发生时,PID会仍处于“自动”模式,Error报错,输出为0.0。
错误离开后,切换到“自动”模式正常运行。
图2.“错误未决”错误响应_出现错误时PID控制器保留自动模式
具体“组态错误的响应区别与非活动时,控制器的状态及输出值的变化”
如何进行PIDCompact的故障复位?
当PIDCompact发生错误时Error=1且ErrorBits显示错误信息,当错误离开后,Error=0且ErrorBits会保留错误信息。
Error
如果Error = TRUE,则此周期内至少有一条错误消息处于未决状态。
ErrorBits
ErrorBits参数显示错误消息。
通过Reset或ErrorAck的上升沿来复位ErrorBits。
如果错误一直存在无法消除时,建议检查错误信息排除故障。
Reset沿变化能够重启控制器,因此不建议使用Reset来清除错误信息。
通过ErrorAck的上升沿可以清除已经离开的错误信息,包括ErrorBits和Warning。
ErrorAck
FALSE->TRUE上升沿时,错误确认,清除已经离开的错误信息。
Reset
重新启动控制器:
FALSE->TRUE上升沿,切换到“未激活”模式,同时将复位ErrorBits和Warnings,清除积分作用(保留PID参数)。
只要Reset = TRUE,PID_Compact便会保持在“未激活”模式下(State = 0)。
TRUE->FALSE下降沿,PID_Compact将切换到保存在Mode参数中的工作模式。
如何切换PIDCompact控制器的工作模式?
若PID控制器未正常工作,请先检查PID的输出状态State来判断PID控制器的当前工作模式:
State
State参数显示了PID控制器的当前工作模式。
可使用输入参数Mode和ModeActivate处的上升沿更改工作模式:
State= 0:
未激活
State = 1:
预调节
State = 2:
精确调节
State = 3:
自动模式
State = 4:
手动模式
State = 5:
带错误监视的替代输出值
Mode和ModeActive的上升沿组合、ManualEnable的下降沿、Reset的下降沿都可以切换PID控制器的工作模式,为操作简便建议采用ManualEnable进行手/自动模式切换。
ManualEnable
出现FALSE -> TRUE上升沿时会激活“手动模式”,与当前Mode的数值无关。
当ManualEnable=TRUE,无法通过ModeActivate的上升沿或使用调试对话框来更改工作模式。
出现TRUE -> FALSE下降沿时会激活由Mode指定的工作模式。
ManualValue为手动模式下的PID输出值。
ModeActivate
FALSE->TRUE上升沿,PID_Compact将切换到保存在Mode参数中的工作模式。
Reset
重新启动控制器:
FALSE->TRUE上升沿,切换到“未激活”模式,同时将复位ErrorBits和Warnings,清除积分作用(保留PID参数)。
只要Reset = TRUE,PID_Compact便会保持在“未激活”模式下(State = 0)。
TRUE->FALSE下降沿,PID_Compact将切换到保存在Mode参数中的工作模式。
如何切换PID_Compact手动/自动状态可参考以下流程图:
如何实现PIDCompact手/自动模式的无扰切换?
PID自动/手动控制,就是看控制系统的输出是由PID控制器自动控制,还是由操作人员手动控制。
在进行PID自动/手动切换时,如果要求保持控制输出的无扰动切换,需要在编程时注意:
1.PIDCompact手动到自动的模式切换,就是无扰的。
2.PIDCompact自动到手动的模式切换,需要保证切换至手动模式前,PID回路的输出仍然是切换前的输出值。
切换完成后,操作人员可以修改手动设定值。
图3.编写自动切换到手动时无扰的程序
在PIDCompact组态界面里手动输入PID参数,为什么重新下载后新的参数不起作用?
激活“手动输入”后可以在此对话框中修改PID参数,须重新下载PID组态。
因为工艺对象背景数据块的数据结构未发生变化,需要 CPU从STOP到RUN后才生效。
图4.PID组态界面_启动手动输入PID参数
在PIDCompact组态界面设置了CPU重启后的工作模式,为什么重新启动PLC后不起作用?
图5.设置CPU重启后激活的PID工作模式
组态界面设置的CPU重启后激活的工作模式,属于组态功能直接作用于工艺对象的背景数据块。
这要求 PIDCompact指令中的Mode参数不使用其他变量控制,如图6(右侧)。
图6.PID指令中的Mode参数控制
当CPU从STOP到RUN后,系统根据组态界面的设置会自动往工艺对象数据块里的Mode参数赋值,使得PID控制器切换至设置的重启模式。
已经在循环中断OB30中调用PIDCompact,为什么运行时PID控制器报错“16#0800H”?
(循环中断OB的采样时间内没有调用PID_Compact)
在循环中断里调用PIDCompact的EN参数中使用控制变量,若当PID控制器已经在自动运行模式后,禁用EN处控制变量,则会报错“16#0800H”:
循环中断OB的采样时间内没有调用PID_Compact。
在循环中断里恒调用PID指令,EN参数不允许串接任何条件。
通过程序来控制参数,从而改变PID的运行模式:
1.PIDCompactV1时,使用PID工艺对象背景DB中,sRet里的i_Mode参数来控制PID的工作模式。
2.PIDCompactV2时,使用其Mode和ModeActive来控制PID的工作模式(如Mode=0,PID未激活)。
如何修改PIDCompact的Output值的限值范围?
ManualValue的范围是多少?
1.在“输出值的限值”窗口中,以百分比形式组态输出值的限值。
无论是在手动模式还是自动模式下,PID的输出Output都不允许超过限值范围。
2.手动模式下的设定值ManualValue,必须介于输出值的下限(Config.OutputLowerLimit默认值0.0)与输出值的上限(Config.OutputUpperLimit默认值100.0)之间的值。
3.”错误未决时的输出替代值“也须在设置限值的范围内。
如果修改了输出值的限值范围,未修改错误响应里的输出替代值,若替代值在限值范围外,则组态错误。
图7.PIDCompact输出值限值设置
如何通过第三方设备,实现PID的预调节/精确调节功能?
图8.第三方设备上启动PID调节模式且可恢复参数
1.在第三方设备上设置Mode和ModeActive,State,ErrorBits、LoadBackUp等变量(绝对地址)访问PID背景DB块变量。
请参见”工艺对象背景数据块的应用“
2.通过控制模式=1、2来启动预调节或精确调节,沿指令触发ModeActive,PID控制器进入调节模式。
3.可以查看输出参数State来判断PID控制器的当前工作状态。
调节成功后,控制器将切换到自动模式。
如果精确调节未成功,则工作模式的切换取决于ActivateRecoverMode。
4.PID调节成功后自动将调节前的参数备份至“CtrlParamsBackUp”,调节出的参数更新至“CtrlParams”。
如果需要恢复整定前的参数,将“LoadBackUp”=1,参数恢复后该参数自动变回0。
 升级会员
升级会员 