F07电子高度系统.docx
《F07电子高度系统.docx》由会员分享,可在线阅读,更多相关《F07电子高度系统.docx(13页珍藏版)》请在冰豆网上搜索。
F07电子高度系统
电子高度控制系统(EHC)
后桥自调标高悬架控制确保车辆高度或最小离地间隙不受负载情况影响。
为此通过2个空气弹簧在所有负载状态下把车身高度抬起到规定的标准高度。
部件简短描述
单桥自调标高悬架控制由下列组件组成:
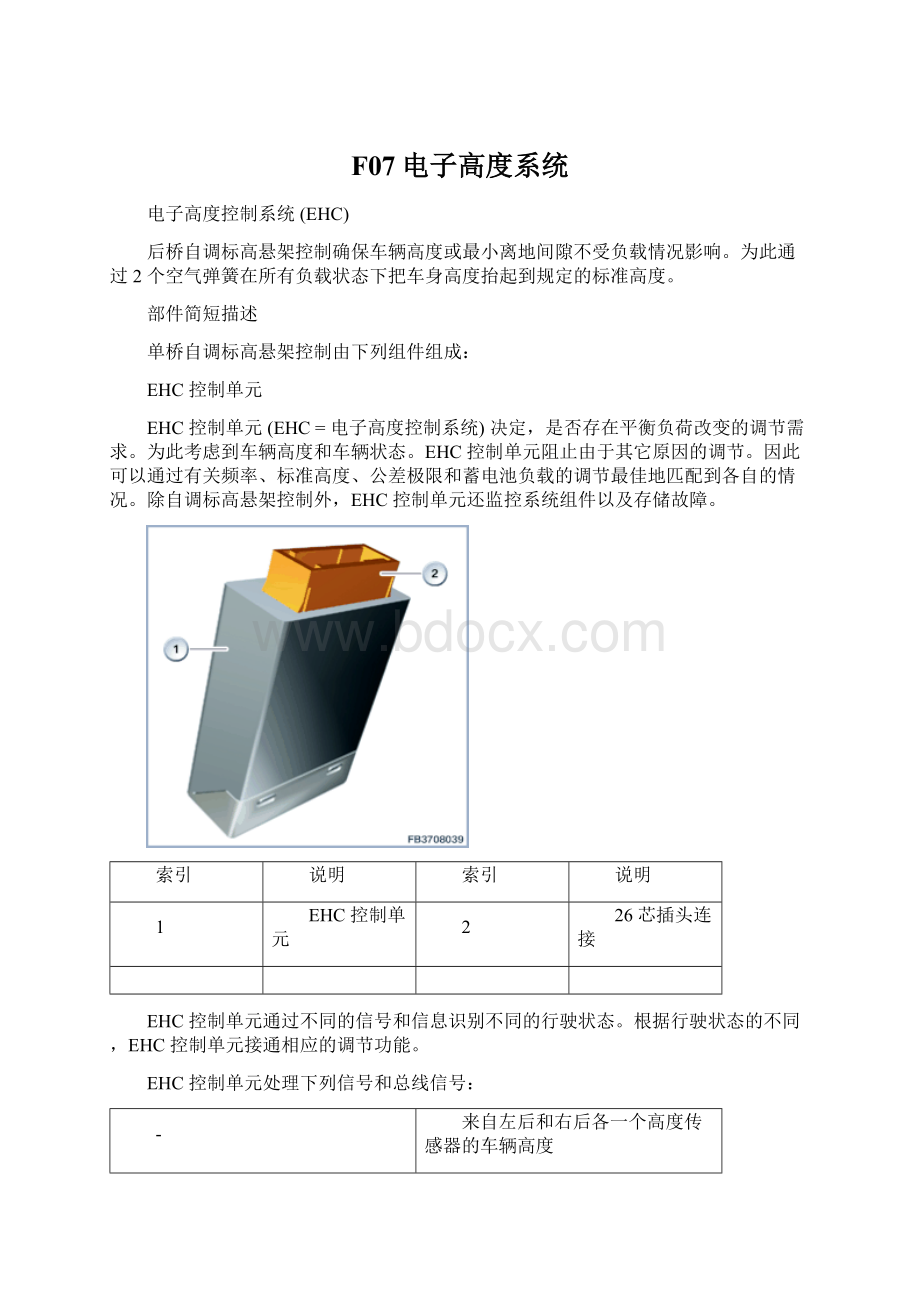
EHC控制单元
EHC控制单元(EHC=电子高度控制系统)决定,是否存在平衡负荷改变的调节需求。
为此考虑到车辆高度和车辆状态。
EHC控制单元阻止由于其它原因的调节。
因此可以通过有关频率、标准高度、公差极限和蓄电池负载的调节最佳地匹配到各自的情况。
除自调标高悬架控制外,EHC控制单元还监控系统组件以及存储故障。
索引
说明
索引
说明
1
EHC控制单元
2
26芯插头连接
EHC控制单元通过不同的信号和信息识别不同的行驶状态。
根据行驶状态的不同,EHC控制单元接通相应的调节功能。
EHC控制单元处理下列信号和总线信号:
-
来自左后和右后各一个高度传感器的车辆高度
-
总线端 Kl.15接通或断开或总线端Kl.R(来自CAS或BDC的总线端状态总线信号)
-
行驶速度(来自一体式底盘管理系统ICM的动态行驶总线信号)
-
横向加速度(来自一体式底盘管理系统ICM的动态行驶总线信号)
-
发动机运转信号(来自DME或DDE的总线信号)
-
关于车门和后行李箱盖状态的信息(来自CAS、FRM、JBE、BDC的盖板状态总线信号)
-
里程数(来自组合仪表的总线信号)
-
挂车识别(来自AHM控制单元的总线信号)
-
轮胎压力监控或胎压报警指示的状态(来自RDC控制单元或DSC控制单元的总线信号)。
供气装置
供气装置的功能通过控制压缩机和控制电磁阀实现。
EHC控制单元控制这些功能。
显示出F01
索引
说明
索引
说明
1
放气阀的2芯插头连接
2
放气阀
3
空气干燥器
4
压缩机
5
电磁阀体的3芯插头连接
6
电磁阀体
7
电动马达的2芯插头连接
8
电动马达
显示出F15
索引
说明
索引
说明
1
电动马达
2
压缩机
3
空气干燥器
4
放气阀的2芯插头连接
5
电动马达的2芯插头连接
6
电磁阀体的3芯插头连接
7
阀体
供气装置包括下列组件:
∙驱动压缩机的电动马达
∙带空气干燥器的压缩机
∙带有限压功能的放气阀
∙带2 个电磁阀(两位两通阀)的电磁阀体
示例图
索引
说明
索引
说明
1
空气过滤器
2
2芯插头连接
3
2芯插头连接
4
3芯插头连接
5
用于控制右侧空气弹簧的电磁阀
6
用于控制左侧空气弹簧的电磁阀
7
右后空气弹簧
8
左后空气弹簧
9
空气干燥器
10
控制阀
11
带有限压功能的放气阀
12
压缩机
13
进气装置
14
电动马达
15
安全阀
16
排气装置
压缩机
压缩机通过一个电动马达驱动。
通过一个继电器为此电动马达供电。
EHC控制单元持续控制继电器,直至达到规定的标准高度为止。
通过一个时间模型监控压缩机温度(保存在EHC控制单元中)。
当超过最大压缩机运行时间时,将抑制下一步的调节。
当低于重新接通阈值时,又能进行调节。
空气干燥器
由压缩机吸入的空气在空气干燥器中穿过一个吸收水份的过滤器。
在此过程中空气中的水份被去除。
只要空气比过滤器潮湿,过滤器就会吸收水分。
在倒流时空气比过滤器干燥。
因此水份重新归还给空气并向外输出。
电磁阀体
电磁阀体包括下列阀门:
∙用于控制左后空气弹簧的电磁阀
∙用于控制右后空气弹簧的电磁阀
放气阀
放气阀由EHC控制单元控制。
通过放气阀,空气将经过空气干燥器从电磁阀体中排出。
通过排放阀的限压功能按如下方式限制供气装置中的压力:
最高压力13.5 bar(与温度有关的公差+5至+6.5 bar=较长时间不使用排放阀时的扭断力矩)
2 个空气弹簧
空气弹簧集成在减震支柱中。
一个铝制套筒围住空气弹簧。
空气弹簧在车身和轮架之间构成了气密和可移动的连接。
空气弹簧中的空气压力承担当时的车辆负荷。
图中显示空气弹簧F0x。
索引
说明
索引
说明
1
减震器轴承
2
辅助弹簧
3
滚动柱塞
4
可调节减震器
5
橡胶防尘罩
6
外导向件
7
膜片折叠气囊
8
余压保持阀
2 个高度传感器
EHC控制单元从高度传感器获取车辆左右两侧的高度信息。
对EHC来说重要的高度传感器安装在后桥上。
提示!
F00x,F1x:
自2010年9月起取消了高度传感器在EHC控制单元上的直接连接。
EHC控制单元通过总线系统接收信号。
索引
说明
索引
说明
1
耦合杆
2
6芯插头连接
3
高度传感器
车轮升程通过耦合杆转换为高度传感器的旋转运动。
在振动和逐渐恢复平稳时高度传感器的输出电压线性变化。
在左后弹簧压缩时输出电压升高。
在弹簧弹回时,输出电压降低(右后正好相反,由安装位置决定)。
检查控制
单桥自调标高悬架控制的故障在组合仪表上通过一个检查控制符号(黄色)显示。
可在中央信息显示器(CID)中调出此检查控制信息的文本。
系统功能
自调标高悬架控制通过空气弹簧的进气或排气实现。
EHC控制单元从高度传感器获取车辆左右两侧的高度信息。
如果高度在规定的公差范围之外(取决于车辆状态,例如发动机运转),则系统通过供气装置调节到标准高度。
显示2010年9月前的F0x。
索引
说明
索引
说明
1
EHC控制单元
2
中央网关模块(ZGM)
3
供气装置
4
电磁阀体
5
用于控制左后空气弹簧的电磁阀
6
用于控制右后空气弹簧的电磁阀
7
压缩机与安装件
8
放气阀
9
电动马达
10
压缩机继电器
11
后部配电器
12
左后高度传感器(仅在2010年9月之前直接连接在EHC控制单元上)
13
右后高度传感器(仅在2010年9月之前直接连接在EHC控制单元上)
显示出F15
索引
说明
索引
说明
1
动态稳定控制系统(DSC)
2
主域控制器(BDC)
3
压缩机与安装件
4
阀体
5
电子高度控制系统(EHC)
6
右后配电器
7
右后高度传感器
8
压缩机继电器
9
左后高度传感器
负载改变主要在行车之前或之后车辆静止时出现。
为给车辆加载,必须打开车门或盖板(行李箱盖)。
当一个车门或后行李箱盖打开时,系统被激活。
系统在下车几分钟后才重新关闭。
为了将负载变化与其它影响(例如路面不平坦)区分开,对高度传感器的信号进行过滤。
为了按需使用,为每个信号计算出两个按频率进行不同过滤的信号(通过快速过滤和慢速过滤的低通过滤)。
在正在进行的调节中总是使用快速过滤。
慢速过滤在行车过程中用于监控调节阈值。
通过这种过滤可以将由路面激起的震动滤除。
车辆两侧分开调节。
也就是说,对两侧分别进行标准与实际值比较。
例外:
在前期模式下和在"倾斜"调节功能中检测最小高度。
在这些调节功能中观察车辆左侧和右侧的平均值。
EHC控制单元通过不同的信号和信息识别不同的车辆状态。
根据车辆状态接通相应匹配的调节功能。
将描述单桥自调标高悬架控制的下列调节功能:
-
静止状态
-
前期模式(时间控制的快进/空转)
-
后期模式(再调整)
-
正常模式
-
驱动模式
-
转向
-
倾斜
-
升降台
-
运输模式
-
生产模式
提示:
所有接下来的时间和尺寸说明都用作举例!
实际设码数据与车型系列和车辆装备有关。
静止状态
休眠模式是调节的初始状态。
在静止状态下不进行调节。
随着进入睡眠模式,已在其它调节模式下开始的调节被取消。
前期模式
在前期模式(时间控制的提前运行或延续运行)中,在登车时已经开始补偿加载以及在车辆停放后仍补偿加载几分钟。
在车辆联锁后延续运行会缩短。
在前期模式下只有当高度明显低于标准高度时,才向上调节到标准高度。
调节的公差带低于平均值约60 毫米。
此公差带规定,EHC控制单元中的电子装置何时进行调节。
通过这个公差确保,只在加载大时进行调节,以便在起动前提高最小离地间隙。
小的加载产生小的弹入行程,该行程在发动机起动时就会得到平衡。
通过此调节特性可降低蓄电池负载。
在前期模式中只观察高度传感器的两个信号的平均值。
后期模式(再调整)
后期模式用来在行车后进入休眠模式前平衡可能的倾斜状态。
此调节功能有时间限制(约1 分钟)。
在后期模式中在一个定义的公差带内进行调节(±10 毫米)。
正常模式
正常模式针对车辆的正常运行模式。
正常模式可通过发动机运转信号导入。
每侧在一个定义的公差带内进行调节(±10 毫米,快速过滤)。
驱动模式
在识别到超过1 km/h的车速信号时,在EHC控制单元中切换到行驶模式。
在行驶模式下通过慢速过滤进行调节。
在行驶模式下例如可平衡由于耗油量导致车辆质量减小而出现的不同高度。
转向
调节功能"转向"防止在识别到转向时进行调节。
慢速过滤停止,并取消可能正在进行的调节。
转向通过输入的横向加速度信号识别(例如识别到高于 2 m/s2的转向,低于1.4 m/s2退出转向)。
ICM控制单元通过K-CAN发送横向加速度信号。
倾斜
"倾斜"运行状态在一个车轮单侧驶上一个障碍物时防止补偿由此引起的倾斜状态。
补偿在驶离该障碍物后会引起车辆重新处于倾斜状态并导致新一轮调节。
当车辆一个车轮压在路沿上行驶和停车时,EHC控制单元从行驶模式切换到正常运行。
在这种调节功能下分析左右高度传感器的信号。
如果车辆左侧和右侧之间的高度差超过一个规定值(例如28 毫米),则切换到调节功能"倾斜"中。
在这种调节功能中,EHC控制单元观察车轴正中的车辆高度。
如果现在给车辆加载或卸载,则观察振动或逐渐恢复平稳的值。
如果数值在定义的公差带之外(例如±10 毫米),则开始一次调节。
车辆左侧和右侧被平行升高或降低。
两侧之间的高度差继续存在。
当EHC控制单元转入行驶模式时,"倾斜"调节功能结束。
正在进行的调节被取消。
当车辆左侧和右侧之间的高度差低于一个规定值时,退出调节功能"倾斜"。
升降台
在调节功能"升降台"中,在更换车轮时或在升降台上操作时防止任何调节。
下列条件触发调节功能"升降台":
-
超过允许的逐渐恢复平衡行程(例如多于 50 毫米,由左侧和/或右侧高度传感器探测)
-
车辆略微抬起(逐渐恢复平稳例如少于 55 毫米),不进行调节且车辆不降低
此高度被存储在EHC控制单元中。
当车辆重新低于这个存储的高度例如10 毫米时或识别到行驶模式时,将进行一次复位。
运输模式
在运输模式中抬起到标准高度(例如 30 mm)。
通过提高离地间隙可保证车辆的无危险运输。
生产模式
生产模式用于生产线上的装配,并同时防止调节过程。
售后服务提示
一般提示
设码
在更换后必须对EHC控制单元进行设码。
进行高度匹配。
执行下列保养工作后,必须进行一次高度匹配:
-
更换单轴自调标高悬架控制的控制单元(EHC控制单元),仅截止2010年8月
-
更换或维修一个或两个高度传感器或其耦合杆
-
维修高度传感器的导线
为了进行高度匹配,必须将在后桥上测得的车辆高度(左右实际高度)输入诊断系统中。
为此要在诊断系统上选择服务功能"高度匹配"。
工作步骤参见维修说明!
保留印刷错误、内容疏忽和技术更改的可能性。
 升级会员
升级会员 