ACR运动控制器快速上手.docx
《ACR运动控制器快速上手.docx》由会员分享,可在线阅读,更多相关《ACR运动控制器快速上手.docx(24页珍藏版)》请在冰豆网上搜索。
ACR运动控制器快速上手
ACR运动控制器快速上手
一、新建工程
ACR-View软件是用于ACR系列运动控制器的程序开发和调试软件,下面主要讲解该软件的使用方法,希望能为您在使用ACR运动控制产品的时候提供帮助。
ACR-View软件安装好之后,我们可以通过下面的方法来打开。
逐步单击“开始”菜单——“所有程序”——“ParkerAutomation”——“ACR-View”——“ACR-ViewProgram”,
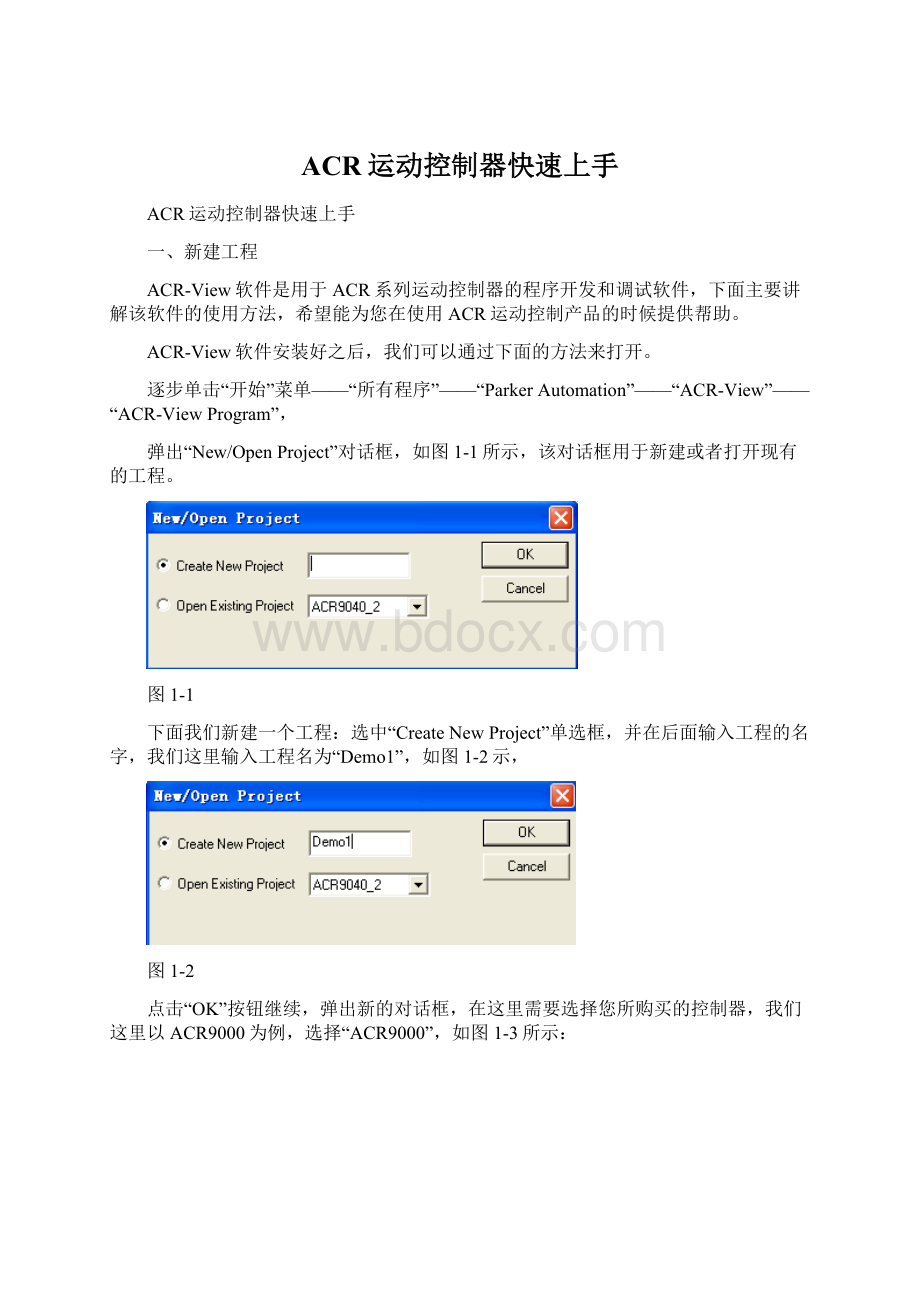
弹出“New/OpenProject”对话框,如图1-1所示,该对话框用于新建或者打开现有的工程。
图1-1
下面我们新建一个工程:
选中“CreateNewProject”单选框,并在后面输入工程的名字,我们这里输入工程名为“Demo1”,如图1-2示,
图1-2
点击“OK”按钮继续,弹出新的对话框,在这里需要选择您所购买的控制器,我们这里以ACR9000为例,选择“ACR9000”,如图1-3所示:
图1-3
单击“下一步”按钮,在新弹出的对话框中选择所购买的ACR控制器型号,我们手头的产品是9000P3U4M1,因此选择这个型号,如图1-4示:
图1-4
单击“下一步”按钮,在新弹出的对话框中保持默认设置,再单击“下一步”
至此,工程配置操作完成,弹出ACR-View主界面,如图1-5示:
图1-5
我们可以看到,该对话框主要分成四个区域:
1.最上面是菜单栏
2.菜单栏下面是工具栏(分上下两层,上层是通用工具栏,下层是梯形图编程工具栏)
3.工具栏下面左侧是树形向导,也是我们经常要打交道的地方
4.树形向导右侧是主操作界面区域,其显示内容会根据在树形向导中所选择内容的不同而变化,我们大部分操作都要在这个地方进行。
当新建一个工程后,在主界面中首先会显示“通讯”对话框,如图1-6示
图1-6
在这个对话框中,我们要选择用到的通讯方式,主要有下面4种:
Bus:
总线通讯,只用于ACR1505,ACR8020板卡式运动控制器
Serial:
串口,在后面指定与运动控制器连接的PC机的串口号,及通讯速率
Ethernet:
以太网,在后面输入ACR9000的IP地址,ACR9000出厂默认的IP地址为192.168.10.40
USB:
电脑通过USB与ACR9000通讯。
我们这里选择以太网,IP设为192.168.10.40,电机“Connect”按钮,使电脑与ACR9000连接。
注:
如果不跟ACR运动控制器连接,也可以对系统进行配置,但不能把配置文件下载到控制器中。
二、电机轴配置
下面我们需要对ACR9000的各个电机轴进行配置,这里我们以控制两轴的平面运动为例,X轴用安川电机,速度控制方式,Y轴用我公司自主品牌的赛开隆电机,位置控制方式。
我们单击左侧“树形向导”中的“ConfigurationWizard(配置向导)”,如图1-7中蓝色区域位置:
图1-7
点击后,会在主界面区域中弹出图1-8所示对话框:
图1-8
该对话框是对“ConfigurationWizard(配置向导)”简单说明,点击“Find”按钮(图1-8中黑框处)可以查看当前控制器中的固件版本号,单击“Next”按钮继续,弹出1-9所示对话框:
该对话框说明了配置需要有哪些步骤,单击“Next”按钮继续到下一步。
单击“Back”按钮可返回上一步。
图1-9
单击“Next”后,弹出图1-10所示对话框,从这里要开始对第一个电机轴进行配置
图1-10
该对话框指定轴的名字,及控制器对驱动器输出的信号类型。
AxisName:
指定轴的名字,一般保持默认。
CommandOutput:
选择控制器输出给驱动器的信号类型,“DAC”代表输出+/-10V模拟量(用于驱动器工作于速度和转矩控制下),“Stepper”代表输出脉冲加方向信号(用于驱动器工作于位置控制下),DAC0/Stepper0对应控制器的“AXIS0”接口,DAC1/Stepper1对应于控制器的“AXIS1”接口,依次类推
我们这里保持轴的名字为“X”,输出信号类型选择“DAC0”,单击“Next”按钮继续,弹出图1-11所示对话框:
图1-11
该对话框用于选择驱动器和电机:
如果您购买的是Parker的电机和驱动器,一般可以直接选择出来,如果用的是非Parker驱动器和电机(比如我们这里用的是安川驱动器和电机),我们要在相应的选择框里选择“Other”。
单击“Next”按钮继续,弹出图1-12所示对话框:
该对话框用于对位置环及速度环的编码器进行设置。
Type:
选择编码器的类型,默认为“FullQuadrature(全积分)”,即控制器将编码器信号做4倍频处理,这也是最常用的选择。
Source:
选择编码器通道,即控制器形成闭环是接收哪个通道的编码器信号。
Resolution:
指定编码器精度。
比如我们用的安川电机编码器是2048线,编码器类型选的是“FullQuadrature(全积分)”,因此我们在此要输入2048*4=8192
Polarity:
编码器极性选择,即选择控制器接收到的编码器信号是A相超前还是B相超前。
如果我们控制电机的时候电机飞车(不可控,一直以额定速度朝一个方向转),那么很有可能是极性配置的问题,详情请查看如何解决电机飞车一节。
图1-12
我们除了可以设置位置环的编码器,还可以再对速度环的编码器进行设置,不过我们现在实验不需要对其设置,您可以参看后面的ACR运动控制器双环控制一节。
单击“Next”按钮,弹出图1-13所示对话框:
该对话框用于设置轴比,通过设置单位,传动机构,及减速机构,ACR运动控制器会自动对轴比进行换算。
例如:
我们用电机通过丝杠带动一个平台,丝杠导程5mm。
我们按照图1-13所示进行配置即可,这样电机转一圈,平台即运行5mm。
我们单击“Next”按钮继续,弹出图1-14所示对话框:
该对话框用于设置硬限位,软限位及位置误差的限制。
这里我们使能硬件限位,软限位设置为正向100mm,方向-20mm,跟随误差设为+/-1mm。
单击“Next”继续,弹出图1-15所示对话框:
图1-13
图1-14
图1-15
该对话框用于指定控制器上的哪个数字量输入通道对应于限位开关,原点开关。
我们这里指定控制器的数字量输入通道0(即BIT0)用于正限位,当我们分配好正限位后,“Input1”和“Input2”自动分配为负限位和原点开关。
该对话框中的“InputType”用于选择所连接开关的类型,是常开还是常闭。
单击“Next”,进入如图1-16所示对话框:
该对话框是一个伺服参数调节对话框(ACR1505,ACR8020无此对话框)。
单击“Next”继续,弹出如图1-17所示对话框:
图1-16
图1-17
该对话框是一个综合调试对话框(ACR1505,ACR8020无此对话框):
可以对硬限位,软限位设置,可以让电机JOG试运行及对回零进行测试。
单击“Next”,至此,我们已经完成了对于“X”轴的配置。
对“Y”轴的配置与“X”轴步骤完全一样,不同的是,在输出信号类型处选择“Stepper1(采用位置控制方式,发送脉冲)”,电机选择“Other”,精度2500脉冲/转,无需对反馈进行配置,其他与“X”轴配置类似,可参考“X”之。
如果控制器的某个轴不需要使用,那么我们需要在输出信号类型处选择“NOTUSED”,这样控制器就不需要对这个轴分配处理时间。
对于剩下的两个轴,我们都选择“NOTUSED”,如图“1-17”所示:
图1-17
单击“Next”按钮,弹出图“1-18”所示对话框。
图1-18
该对话框用于把轴分配到坐标系(Master)中。
我们把需要联动的轴分配到一个Master中。
这里我们把X轴和Y轴分配到Master0中。
在一个Master中最多可分配8个轴,且一个轴只能分配到一个Master中。
ACR系列控制器最多支持8个Master(坐标系)。
单击“Next”按钮继续,弹出图“1-19”所示对话框。
该对话框用于指定电机的“加速度”,“减速度”,“运行速度”,“停止速度”及是否以“S曲线”方式运行。
按如图方式指定,按“Next”按钮继续,弹出图“1-20”
所示对话框:
图1-19
图1-20
该对话框用于为Program,PLC分配存储空间,以及控制器可用的全局变量的个数。
程序究竟占多少存储空间在后面会有详细介绍。
单击“Next”按钮继续,弹出图“1-21”所示对话框:
图1-21
该对话框用于对CANOpen参数进行配置(如果控制器不带CANOpen接口,则不会弹出该对话框),单击“Next”按钮弹出图“1-22”所示对话框:
至此,我们的配置工作全部完成,单击“Finish”按钮将配置下载到控制器中。
图1-22
配置文件将保存到控制器的EEPROM中。
以后如果不更换电机,就无需再对电机轴进行配置。
三、程序开发
在树形向导中可以看到,ACR运动控制器可以编写16个program程序和8个PLC程序,如图1-23所示:
Program程序是用AcroBasic语言来开发的,功能十分强大,可以充分满足客户各种运动控制的需求。
其中program0-program7用来编写运动程序,program8-program15用来编写非运动程序(如完成各种计算,与其他设备进行通讯等)。
program0-program7与Master0-Master7(坐标系0-7)有着严格的对应关系。
控制Master0中的轴的运动程序必须编写到program0中,控制Master1中的轴的运动程序必须编写到program1中,依次类推。
单击任意的program编辑器即可打开相应的program程序开发窗口,如图1-24所示:
在这里可以使用AcroBasic语言来开发您的运动程序。
AcroBasic指令请参考相应手册。
图1-23
图1-24
PLC程序主要用于完成逻辑判断及控制的功能,支持梯形图和结构文本两种开发方式,如图1-25所示:
图1-25
通过VIEW菜单可以在两种开发方式中切换。
四、运动监视、调试
ACR-View为我们提供了大量的工具供我们监视,调试电机的运行。
(1)Terminal(终端对话框)
单击树形向导中的TerminalEmulator,可以打开终端对话框。
如图1-26所示。
在终端对话框中,可以发送在线指令,当按下键盘上的回车键时,所输入的指令将立即执行。
我们可以把常用的命令保存到终端对话框右侧的“UserButton”中,这样当按下“UserButton”按钮后,相对于发送了对应的指令。
在终端对话框中还可以监视,跟踪程序的运行。
程序中使用“Print”语言输出的内容也将显示到终端对话框中。
图1-26
(2)StatusPanels(状态监视面板)
树形向导中的StatusPanels(状态监视面板)中包含有五个状态面板。
1.CommonStatusPanel(通用状态监视面板,ACR1505,ACR8020无此面板)
图1-27
如图1-27所示:
该面板可以直观的监视各个电机轴及坐标系的运行情况。
2.NumericStatus(参数状态监视面板)
图1-28
如图1-28所示,参数状态监视面板可以监视ACR运动控制器中所有P变量的状态。
P变量根据功能被加以分类,可以通过三个下拉组合框找到所要监视的P变量。
例1:
我们想监视X轴的编码器值(Encoder0),可以在三个下拉组合框中依次选择“ObjectParameters”-“EncoderParameters”-“EncoderPosition”,如图1-28所示:
例2:
我们想监视X轴的模拟量输出值,可以依次选择“ObjectParameters”-“DACparameters”-“DACOutput”,如图1-29所示:
在ACR系列运动控制器中,P参数用来存储整型变量及实型变量,这些变量包括全局变量和控制器预设的变量。
图1-29
3.BITStatus(BIT位状态监视面板)
BIT位状态监视面板用来监视ACR运动控制器中的全部BIT变量状态,如图1-30所示:
图1-30
与P变量监视面板相同,可以通过三个下拉组合框找到所要监视的BIT变量。
BIT变量用来保存BOOL型变量,只有真和假两种状态,它包括实际的物理I/O及控制器内部定义的BIT状态。
4.CPULoadStatus(CPU运行监视面板)
CPU运行监视面板用来监视当前控制器CPU的运行情况,如图1-31所示:
该面板类似于计算机中任务管理器的性能监视面板。
图1-31
5.ServoLoopStatus(伺服环状态监视面板)
图1-32
如图1-32所示:
可以通过伺服环状态监视面板直观的监视伺服环的运行情况。
参与伺服运算的所有参数都可以在同一个面板中监视到。
 升级会员
升级会员 