matlab论文之MATLAB的超前校正的应用.docx
《matlab论文之MATLAB的超前校正的应用.docx》由会员分享,可在线阅读,更多相关《matlab论文之MATLAB的超前校正的应用.docx(12页珍藏版)》请在冰豆网上搜索。
matlab论文之MATLAB的超前校正的应用
MATLAB的超前校正的应用
姓名:
*****
学号:
*******
关键字:
超前校正,相角裕度,波特图
摘要:
通过MATLAB仿真何以很直观的表示出系统在超前校正前后的不同,可以省去很大的计算量,简洁而直观。
MATLAB提供了强大的矩阵处理和绘图功能,很多专家因此在自己擅长的领域用它编写了很多专门的MATLAB工具箱,工具箱中广泛继承了用于扩展基本程序功能的M文件,如控制系统工具箱,系统辨识工具箱,信号处理工具箱等。
MATLAB不失为一款很强大的软件,本例中将不使用已有的工具箱进行系统的模拟以及应用,将直接以代码的形式对系统进行超前校正。
一般来说,开环频率特性的低频段表征了闭环系统的稳态性能;开环频率特性的中频段表征了闭环系统的动态性能;开环频率特性的高频段表征了闭环系统的复杂性和噪声抑制能力。
因此,用频域法设计控制系统的本质,就是在系统中加入频率特性形状合适的校正装置,使开环系统频率特性形状变成所期望的形状:
低频段曾毅充分大,以保证稳态误差要求;中频段对数幅频特性斜率一般为-20dB/dec,并占据充分宽的频带,以保证具备适当的相角裕度;高频段增益尽快减小,以削弱噪声影响。
原系统可能对于所有的增益值都不稳定,也可能虽属稳定,但不具有理想的瞬态响应特不具有理想的瞬态响应特不具有理想的瞬态响应特不具有理想的瞬态响应特性性性性。
。
。
。
为了矫正这些问题,可以在前向通道中串联一个或几个适当的超前校正装置,使闭环主极点位于复平面内希望的位置上
所谓校正,就是在调整放大器增益后仍然不能全面满足设计要求的性能指标的情况下,加入一些参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,达到设计要求。
其原理如下:
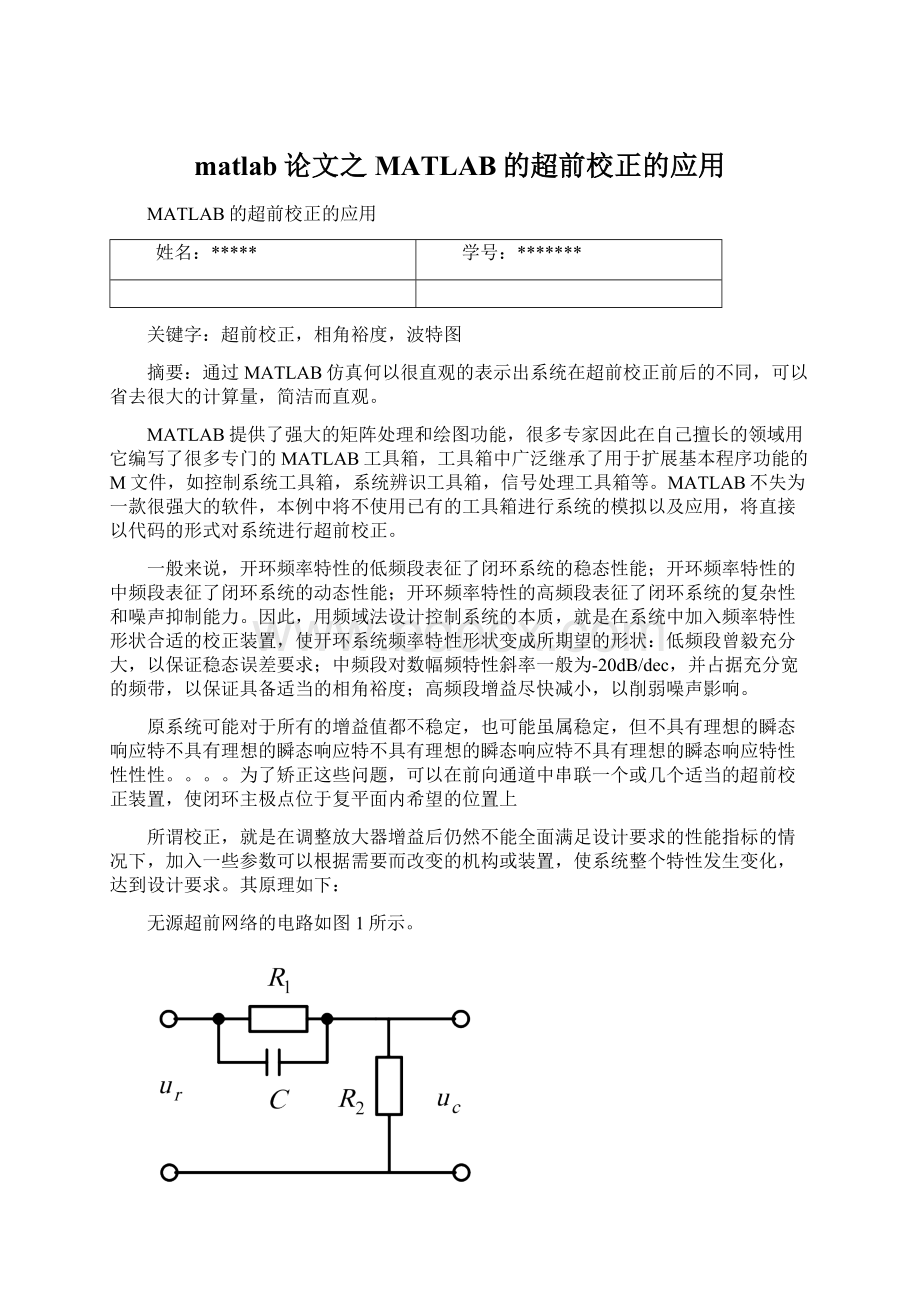
无源超前网络的电路如图1所示。
图1无源超前网络电路图
如果输入信号源的内阻为零,且输出端的负载阻抗为无穷大,则超前网络的传递函数可写为
①(1-1)
式中
通常a为分度系数,T叫时间常数,由式(1-1)可知,采用无源超前网络进行串联校正时,整个系统的开环增益要下降a倍,因此需要提高放大器增益交易补偿。
根据式(1-1),可以得无源超前网络
的对数频率特性,超前网络对频率在1/aT至1/T之间的输入信号有明显的微分作用,在该频率范围内,输出信号相角比输入信号相角超前,超前网络的名称由此而得。
在最大超前角频率
处,具有最大超前角
。
超前网路(1-1)的相角为
(1-2)
将上式对
求导并令其为零,得最大超前角频率
(1-3)
将上式代入(1-2),得最大超前角频率
(1-4)
同时还易知
m仅与衰减因子a有关。
a值越大,超前网络的微分效应越强。
但a的最大值受到超前网络物理结构的制约,通常取为20左右(这就意味着超前网络可以产生的最大相位超前大约为65度)。
利用超前网络行串联校正的基本原理,是利用其相角超前特性。
只要正确地将超前网络的交接频率1/aT或1/T选在待校正系统截止频率的两旁,并适当选择参数a和T,就可以使已校正系统的截止频率和相角裕度满足性能指标的要求,从而改善系统的动态性能。
超前校正的应用方法
待校正闭环系统的稳态性能要求,可通过选择已校正系统的开环增益来保证。
用频域法设计无源超前网络的步骤如下:
1)根据稳态误差要求,确定开环增益K。
2)利用已确定的开环增益,计算待校正系统的相角裕度。
3)根据截止频率
的要求,计算a和T。
令
,以保证系统的响应速
度,并充分利用网络的相角超前特性。
显然
成立的条件是
根据上式不难求出a值,然后由(1-3)确定T。
4)验算已校正系统的相角裕度
。
验算时,由式(1-4)求得
,再由已知的
算出待校正系统在
时的相角裕度
。
最后,按下式算出
如果验算结果不满足指标要求,要重选
,一般使
增大,然后重复以上步骤。
系统设计:
由已知条件,首先根据初始条件调整开环增益。
因为
系统的静态速度误差系数
=
0.25K
≦20,故取
K=80,则待校正的系统开环传递函数为
上式为最小相位系统,用MATLAB画出系统伯德图,程序为:
num=[20];
den=[0.25,1,0];
bode(num,den)
grid
得到的图形如图2所示。
图2校正前系统的伯德图
再用MATLAB求校正前的相角裕度和幅值裕度,程序为:
num=[20];
den=[0.25,1,0];
sys=tf(num,den);
margin(sys)
[gm,pm,wg,wp]=margin(sys)
得到图形如图3所示。
图3校正前系统的裕度图
可得:
相角裕度Pm=25.2deg截止频率wc=8.51rad/s
幅值裕度Gm=∞dB
用MATLAB画出其根轨迹,程序为
num=[20];
den=[0.25,1,0];
rlocus(num,den);
Sgrid;
[k,p]=rlocfind(num,den);
Title('控制系统根轨图')
得到图形如图4所示。
图4校正前系统的根轨迹图
系统计算:
根据1.2中所述超前校正的原理,超前网络提供的最大超前相位角应为
且将提供的最大超前补偿到w=wm处,由式(2-4),可得
γ1=
由
得
在此基础上超前校正控制器设计的程序代码为:
G=tf(20,[0.2510]);
margin(G);%画出Bode图并显示频域性能指标
phy=50-25.18+10;
phy1=phy*pi/180;
a=(1+sin(phy1))/(1-sin(phy1));
M1=1/sqrt(a);
%分别返回频域响应幅值响应m、相角响应(以度为单位)和频率向量w
[m,p,w]=bode(G);
%spline为3次曲线插值函数,通过插值求新的截止频率
wm=spline(m,w,M1);
T=1/(wm*sqrt(a));
Gc=tf([a*T1],[T1])
超前校正控制器传递函数为,
Transferfunction:
0.1588s+1
-------------
0.04336s+1
校正后的验证:
画出校正后的Bode图,程序为
num=[3.176,20];
den=[0.011,0.293,1,0];
sys=tf(num,den);
margin(sys)
[gm,pm,wg,wp]=margin(sys)
校正后系统的Bode图如5图所示。
图5校正后系统的裕度图
图5校正后系统的裕度图
相角裕度:
Pm=52.8deg;截止频率:
wm=12.1rad/sec
幅值裕度:
Gm=∞dB
可见其相角裕度、幅值裕度均满足设计要求。
所以,已校正系统的开环传递函数为:
用MATLAB画出校正后的根轨迹,程序为:
num=[3.176,20];
den=[0.011,0.293,1,0];
rlocus(num,den);
Title('控制系统根轨图')
得到图形如图6所示。
图6校正后系统的根轨迹
2.2.3超前校正对系统性能改变的分析
用MATLAB画出校正前后系统的单位阶跃响应的程序为
num1=[20];
den1=[0.25,1,0];
num3=[3.176,20];
den3=[0.011,0.293,1,0];
t=[0:
0.02:
5]
[numc1,denc1]=cloop(num1,den1)④
y1=step(numc1,denc1,t)
[numc3,denc3]=cloop(num3,den3)
y3=step(numc3,denc3,t)
plot(t,[y1,y3]);
grid
gtext('校正前')
gtext('校正后')
得到图形如图7所示
图7校正前后系统的单位阶跃响应图
也可用Matlab的仿真功能⑤得到单位阶跃响应图,如图8。
图8校正后的系统仿真方框图
由图7明显可以看出:
1)加入校正装置后,校正后系统单位阶跃响应的调节时间大大减小,大大提升了系统的响应速度。
2)校正后系统的超调量明显减小了,阻尼比增大,动态性能得到改善。
3)校正后系统的上升时间减小很多,从而提升了系统的响应速度。
综上,串入超前校正装置后,明显地提升了系统的动态性能指标,增强了系统的稳定性。
心得体会
在很多人眼中MATLAB这个课程是一种煎熬,自动控制的频域分析法及其应用更是阴魂不散的恶梦。
但是我们不得不承认,MATLAB是一个很强大的软件,自动控制也是一门很实用的课程。
我选这个课题是因为系统校正是我刚学的内容。
通过这个课题研究,我获益良多。
首先当然是对于课本知识的再学习和更深刻的理解,和做题目不一样,在做课设时需要全方面的考虑问题,而不是单纯的算出一个结果,特别是对与校正系统,在试取值时需要耐心的验算,在校正后还需要前后的对比分析,我这次在校正时刚开始就没能取到合适的值,但是在重新取值后最终还是满足了要求。
虽说这个过程并不算是多么的漫长或艰难,但是这种经历确实能让我们养成一种不断探索的科学研究精神,我想对于工学学生这个是很重要的。
这次课程论文对我的另一大考验就是MATLAB的应用,虽说之前上过基础强化训练课,但是并没有具体到在自动控制系统上的应用,所以自己查资料是必须的,对于工科学生来说查资料也是必备的能力,有些问题在不会时看上去很可怕,但是在看过资料后才发现也没有想象的那么难,这次课设中用到的MATLAB就比我之前想的要容易,我想搞课设很大的一方面原因也是为了提高我们的自学意识和自学能力,通过这次课设,我在查资料的能力上也确实得到了提高,除开图书馆,上网搜索也的确是不错的选择。
当然,写这个论文也遇到过一些麻烦,主要还是对课程即超前校正的不熟悉,在熟悉这个过程中花了不少的时间,实际在对MATLAB进行制作的过程中,没有遇到很大的困难,无非是一些代码以及格式的学习。
通过本课程论文,我觉得实际操作联系理论进行学习是个不错的过程,但是花的时间不在少数,怎么才能在短时间内完成课程任务,又让自己学到不少知识,还是值得思考的一个问题。
不少人抱怨在大学学不到东西,我并不这样认为。
我想无论是在学习还是在生活上只有自己有心去学习和参与才可能有收获,这也算是课设给我知识之外的一点小小的感悟。
参考文献
1胡寿松.自动控制原理(第四版).北京:
科学出版社,2002年
2计算机仿真技术与CAD——基于MATLAB的控制系统(第三版).电子工业出版社
 升级会员
升级会员 