自由空间激光通信系统SILEX的瞄准捕获跟踪子系统DOC.docx
《自由空间激光通信系统SILEX的瞄准捕获跟踪子系统DOC.docx》由会员分享,可在线阅读,更多相关《自由空间激光通信系统SILEX的瞄准捕获跟踪子系统DOC.docx(14页珍藏版)》请在冰豆网上搜索。
自由空间激光通信系统SILEX的瞄准捕获跟踪子系统DOC
自由空间激光通信系统SILEX的瞄准、捕获、跟踪子系统
ToniTolkerNielsen,EuropeanSpaceAgency
关键词:
瞄准,捕获,跟踪,自由空间光通信,空间瞄准机制,精瞄转向镜,基于CCD跟踪,高精度瞄准,多体动力学相互影响,微振动。
摘要
欧洲半导体激光器星间链路实验(SILEX,theEuropeanSemiconductorlaserIntersatelliteLinkEXperiment)的飞行硬件目前正在进行集成,对实验水平的评估在1994年已经进行,子系统水平的评估正在进行。
本论文讲述了设计要求、工程设计和PAT(PointingAcquisitionTracking)子系统测试。
概括描述如下:
任务回顾,系统跟踪和瞄准策略,终端设计,PAT子系统要求,PAT装配设计,PAT子系统设计和地面验证途径。
1:
SILEX任务
SILEX是ESA(EuropeanSpaceAgency)以MMS(F)作为首席承包商进行的一项任务。
SILEX项目的目标是为星间链路建立一个激光通信系统并进行试验。
一个终端是1997年发射的位于欧洲地球同步轨道远程通信卫星ARTEMIS(AdvancedRelayTEchnologyMISsio)上的部分有效载荷,ARTEMIS是ESA以ALENJASPAZIO(I)作为首席承包商进行的一项任务。
配套终端于1997年随法国低轨观测卫星SPOT4发射升空。
SPOT4是CNES以MMS(F)作为首席承包商进行的一项任务。
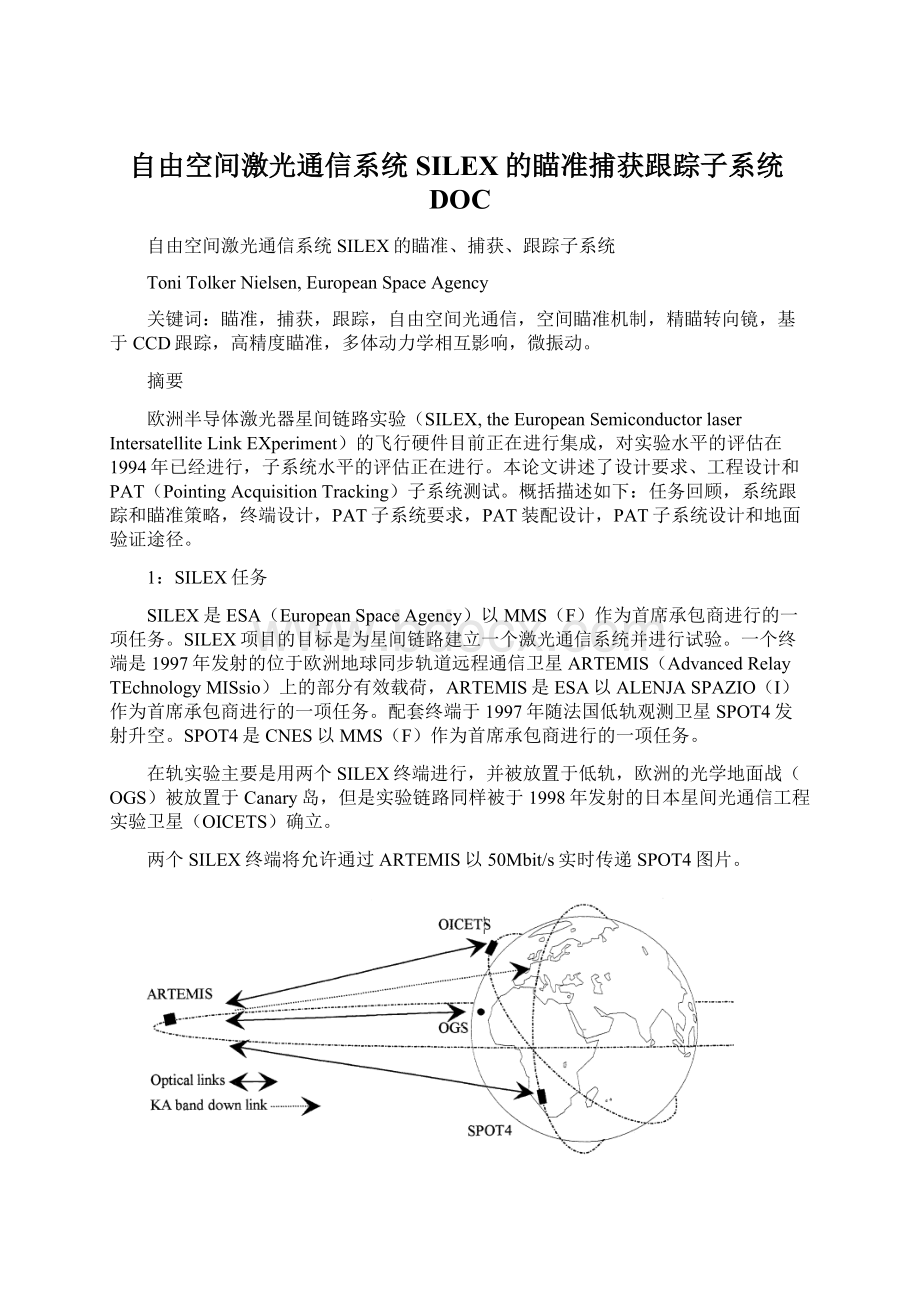
在轨实验主要是用两个SILEX终端进行,并被放置于低轨,欧洲的光学地面战(OGS)被放置于Canary岛,但是实验链路同样被于1998年发射的日本星间光通信工程实验卫星(OICETS)确立。
两个SILEX终端将允许通过ARTEMIS以50Mbit/s实时传递SPOT4图片。
图一SILEX任务方案
2:
SILEX终端结构
在早期设计中,为了使得设备研发费用最小化,LEO和GEO终端之间的公共交换被看作是重要因素。
因此两个终端在设想上用相同的设备从而极其相似。
2.1跟踪和瞄准策略
在宿主平台抖动干扰下,通过对来自于对面终端的入射光进行弧度测量作为瞄准精度的参考获得了接近1μrad的极高瞄准精度,从而两个终端在通信中形成协同的闭合回路跟踪。
与被跟踪终端所在地一致的跟踪角是当光发射时,然而与被瞄准终端所在地一致的理想的瞄准方向是光要到达的时候,换言之,考虑到参考所谓的瞄准前向角的跟踪,瞄准角必须被抵消(由于相对横向卫星速度和有限的光速)。
2.2捕获策略
在终端进行相互闭合回路跟踪之前,链路必须被确定。
姿势导致的误差,连同飞船和终端间结构上的错误排列,比通信光束高出几个量级。
因此在星历表上打开回路情况下瞄准通信光束和获得一个点亮对面终端的可接受概率是不可能的。
事实上,即使高频抖动,宿主平台上的机械扰动导致的所谓的视线微振动,在开环中并不影响瞄准通信光束。
因此,在GEO终端中一束信标光补充进来。
通过在与一束可达到的有限功率合作的配套终端进行可检测限制,信标光束发散角被限制在750μrad。
不确定的圆锥是8000μrad,因此有必要用信标光系统性地扫描不确定的圆锥以确定LEO终端被点亮。
一旦LEO终端通过信标光束被点亮,它一定检测来光的方向,修订它的视线,开始对GEO终端跟踪和发射LEO通信光束。
当GEO检测到来自于LEO终端的通信光束时,它必须停止扫描,修正视线,开始对LEO终端跟踪和发射通信光束。
两个终端便在相互封闭环内跟踪。
其次应重点注意此策略基于带有信标光束的LEO终端的连续点亮,直到被GEO远程光束代替。
2.3终端设计
设计是基于常平架光学装配,即,全部光学装配被安装在一个安装在两轴常平架上的承载结构的移动部分,所谓的粗瞄装配。
LEO终端有一个半球式的瞄准范围,然而由于典型的LEO卫星覆盖,GEO终端被限制在±10º。
光学装配由望远镜和在精确控制的温度环境中地壳均衡地装配在一个高度稳定地光学工作台的包含所有必要的探测器、执行机构、传输机构的光学头组成。
在承载结构的移动部分同样装配着必须在光学头附近如敏感器和执行电子器件或如温度控制器件这样带有高电缆数量的电子器件的电子盒
直接装配在飞船上的电子盒在常平台连接处通过电缆甲胄和电缆外套与移动部分连接。
直径25cm的无焦点望远镜有31.25倍放大率,即直径8mm、有角误差的视域光线乘以31.25后的准平行光束被光学头接收到。
根据应用光线路径,光学头的功能会受到破坏,一些作用于通信光束,一些作用于跟瞄功能:
捕获路径、跟踪路径、发射路径、接收路径和信标路径。
粗瞄装配有一个窗口在0.2Hz的受限带宽,这使得另一个同时在接受和发射光路上以两种可微控反射镜形式的光学工作台直接补偿的高带宽瞄准平台成为必要。
必要的前向瞄准角通过两个处在发射路径上的小微控反射镜实现。
在跟踪过程中针对捕获中的大视场所需的高精度和带宽导致敏感期功能分离成两个:
跟踪敏感器和捕获敏感器。
图二SILEX终端结构图
图三光学头的功能模块程序
3:
PAT子系统要求
对PAT子系统的要求一方面通过以必要的瞄准精度设计驱动,但是另一方面主要设计驱动是宿主飞行器的姿态和微振动输入行为。
两个宿主平台的相关精度事实上沿着或多或少可被预测的轨道抖动。
3.1捕获功能要求
*预瞄准和两终端的开环视场光线控制。
*对GEO轨道上终端的不确定圆锥信标光束的系统扫描。
*信标光束和LEO轨道终端上带有接收光束的接收LOS排列的等待和检测。
*指向GEO终端的望远光束的发射。
*LEO望远光束和GEO终端上接收LOS的排列的检测。
开环视场线控制的精度必须保证不确定圆锥比LEO上捕获敏感器FOV小,从而使GEO上扫描时间最小化。
分配给的时间扫描时间是130s。
用信标光束的LEO终端连续点亮的捕获策略对捕获时间进行了严格的限制。
给LEO捕获、望远光束发射和GEO捕获检测的分配时间是0.45s。
3.2跟踪功能要求
*存在动力学扰动时,维持接收光束的接受LOS排列。
跟踪所需精度由通信接收前端的视场和拥有一个瞄准功能的参照的需要标定尺寸。
3.3瞄准要求
*指向配套终端的发射光束,即根据光的有限速度和横向非零速度实现必要的与接受LOS相关的瞄准前端角。
获得的最大瞄准前端角是70μrad。
考虑到理想瞄准方向,所需精度是:
偏差0.65μrad、动力学0.22μrad(1σ)(这些数据不包括光学和光机对所有终端瞄准的误差所造成影响)。
4:
PAT装配
SILEX的PAT子系统由以下装备组成:
粗瞄装配、精瞄装配、瞄准前端装配、跟踪敏感器、捕获敏感器、精瞄和敏感器控制电路(包含软件)、安装在终端处理器上的PAT软件。
FPA和PPA的行为涉及到内部角度。
即光学头中的角度通过望远镜放大而分离以得到自由空间视场光线角。
4.1粗瞄装配
MatraMarconiSpace(F)以下列承包商负责粗瞄装配的开发:
SchrackAerospace(A)负责粗瞄驱动电路,Mecanex(CH)负责接合。
粗瞄装配由粗瞄机械和粗瞄驱动电路组成。
功能要求:
*通过星上处理器详尽阐述的命令指向移动部分(移动部分的质量和惯性使75kg和5kgm2)。
*自动返回移动部分到一个预先确定的休息位置,以防紧急事件,此位置在OBP中没有详细阐述的命令。
*当CPA没有操作时,维持移动部分在一个预先确定的休息位置。
CPM由两个在通过塑料加强的碳纤维支架(CFRP)方式连接的相互垂直的轴上运行的两个连接组成。
一个连接由带有承载僵硬预负载和液体润滑、300步/转的SAGEM57PPP60步进电机、一个十位的光学解码器、一个电缆外罩和一个制动设备的大圆薄片作为外罩的铍组成。
步进电机由一个每0.01s更新一次命令的CPDE在开环微步中控制。
一步被分割成32768微步。
所需精度通过在开环命令中引入补偿获得,从而补偿步进电机固有磁性错误、连接磁滞力矩、连接处粘滞摩擦力矩和电缆外套电阻力矩。
100Hz指令频率产生的周期性干扰力矩通过一个模拟二阶巴特沃兹滤波器滤除。
制动设备由在侧面轨迹运动的可撤销的闸皮组成,从而保证正面锁定。
CPDE由数字部分和模拟部分组成。
数字部分围绕80C85微处理器构建并从OBP接收模式和指向命令。
CPDE将上面提到的补偿添加到命令中并将它发送到基于脉宽调制的所需电流和电机电流控制环来提供电机相位的模拟功率电路。
完全冗余CPDE、冗余运动线圈和冗余解码读出会一定会产生冗余。
特点:
角度覆盖
200º
1s稳定性(1轴)
0.003º
角度速率,瞄准
0.2º/s
70ms稳定性(1轴)
0.001º
角度加速
0.02º/s2
偏差
0.02º
CPM质量
20.8kg
随机
0.02º(3σ)
CPDE质量
12.4kg
60s稳定性(1轴)
0.008º
功率消耗
48W
4.2精瞄装配(FPA)
Teldix(D)负责FPA的开发,它由精瞄机械(FPM)和精瞄驱动电路(FPDE)组成。
功能要求:
*捕获过程中(仅限于GEO)在宽角度扫描信标光束。
*根据在捕获过程中在捕获敏感器上角度的测量,快速偏转入射光束到跟踪敏感器。
*在捕获过程中,根据跟踪敏感器的测量使入射光束聚焦到跟踪敏感器的中心。
*在跟踪过程中,根据跟踪敏感器的测量来维持入射光束在跟踪敏感器的中心。
FPM是一个带有正交排列元件的两个独立反射镜机电瞄准机制。
每一个瞄准元件包含一个移动的执行器线圈和悬挂在弯曲转轴上的反射镜载体。
位置敏感器基于感应位置敏感器。
两个单独的FPDE和在FPM中的冗余位置敏感器确保了冗余。
图四在镜精瞄机制中两个瞄准器件中的一个的交叉部分
特点:
偏转范围
±160mrad(int.)
FPM质量
459g
每步响应时间
15ms
FPDE质量
825g
相关精度
每步大小≤5%
FPM体积
90X59X50mm3
瞄准噪声
5μrad(1σint.)
FPDE体积
159X125X50mm3
频率响应
第二阶,450Hz
功率损耗
1,56W
测量因素误差
1%
4.3提前瞄准装配(PAA)
MatraMarconiSpace(UK)和QueensgateInstruments(UK)负责PAA的开发,它包含提前瞄准机制(PAM)和提前瞄准驱动电路(PADE)。
功能要求:
*与接收有关的传送光束偏转。
在发射路径上位于光学工作台的PAM是一个带有相互垂直元件的两个独立发射镜的机电瞄准机制。
每一个反射镜围绕一个单轴旋转运动。
瞄准元件由悬挂在弯曲转轴上的可移动反射镜组成。
调节反射镜载体的压电线性器件产生激励。
为了适应分配的体积,压力刺激通过摇杆轴被分成四个折叠部分。
位置敏感器是基于直接装在反射镜后面电极的电容位置敏感器。
PAM的结构部分用铍制作。
PADE通过参考位于PAM的位置敏感器和在历书基础上在OPB中详细阐述的指令角控制角度偏移。
通过完全PADE冗余、冗余激励和冗余位置敏感器,冗余被确保。
图五在PAM中两个瞄准器件中的一个的交叉部分
角度范围
±6.5mrad(int.)
PAM质量
390g
运动误差
0.5μrad(1σ,int.)
PADE质量
1070g
偏差
5μrad(int.)
PAM体积
90X60X60mm3
测量因素稳定性
0.07%
PADE体积
159X125X90mm3
角度速率
0.2mrad/s(int.)
功率损耗
1,3W
4.4捕获敏感器(AS)
捕获敏感期由捕获敏感器检测模块(AMD)和捕获检测临近电路模块(ADPEM)组成。
SIRA(UK)负责AS的开发,同时前身为BAe的MatraMarconiSpaceStevenage(UK)作为ADPEM的子承包商。
功能要求:
*在捕获视场中聚焦入射光的空间检测。
捕获敏感器基于来自THOMSONCMS(F)的384X288像素的CCD阵列。
此CCD被安装在高度稳定的结构上。
时钟驱动、录像前置放大器平台和功率提供管理器被安装在ADPEM上。
读出时钟信号从精瞄和敏感器控制电路(FPSCE)获得。
有用的像素用3MHz频率读出并送到FPSCE进行进一步处理。
为了保护CCD免于辐射环境干扰,附加的遮挡被安装以保证当安装在终端时有一个相当于15mm厚铝板的遮挡。
两个捕获敏感器被安装在终端上以保证冗余。
特点:
LEO
GEO
有用像素读出频率
3MHz
3MHz
视场
8640X8640μrad2(ext.)
1050X1050μrad2(ext.)
像素大小
23μm
23μm
有用像素
288X288
70X70
图象频率
32Hz
130Hz
功率损耗
1,2W
ADM质量
270g
ADPEM质量
440g
ADM尺寸
96X55X55mm3
ADPEM尺寸
114X80X60mm3
4.5跟踪敏感器
SIRA负责跟踪敏感器的开发。
功能要求:
*在跟踪视场进行入射光空间检测。
跟踪敏感器基于来自THOMSONCMS(F)的14X14像素CCD阵列THX31160。
CCD和聚焦光与时钟驱动、录像前置放大器、功率提供管理器被装配在高度稳定的结构上。
读出时钟信号从FPSCE接收。
有用像素用3MHz或者1MHz读出并送到FPSCE用于进一步处理。
一个与瞄准敏感器相似的遮挡被安装。
终端上安装两个跟踪敏感器用于冗余。
特点:
捕获
跟踪
有用像素和读出频率
3MHz
1MHz
视场
238X238μrad2(ext.)
17X17μrad2(ext.)
像素大小
23μm
23μm
有用像素
14X14
2X4
图象频率
1kHz,4kHz,8kHz
4kHz,8kHz
温度稳定性
3μrad/℃
功率损耗
1.8W
质量
470g
尺寸
84X65X125mm3
4.6精瞄和敏感期控制电路(FPSCE)
MatraMarconiSpace(F)负责被安装在移动部分的FPSCE的开发。
功能要求:
*和星上处理器的接口。
*模式的自动控制。
*录像处理和瞄准敏感器与跟踪敏感器定序。
*根据来自于星上处理器的扫描侧面或者来自于捕获敏感器和跟踪敏感器的捕获和跟踪错误信号产生精瞄指令。
*跟据由在微量操作过程中有星上处理器计算得到的前向瞄准角和在接收和传输路径上的校准中的跟踪敏感器来产生前向瞄准指令。
获得和过滤PAA和FPA位置测量用以星上处理器进一步处理。
*提供捕获、错过、遥感探测。
*为位于移动部分的PAT装备提供的能量提供管理。
设计基于来自于模拟设备的数字信号处理器ADSP2100和Actel的FPGA的应用。
为了获得敏感器信号处理和8kHz的精瞄指令,DSP是32MHz。
程序和数据存储器以8KX8被安装在高速RAM中。
数模转换装置以用12位数模转换器运行。
160mrad的精瞄范围导致在跟踪中12位分辨率与所需精度不兼容,因此有必要将精瞄指令分在两个DACs上:
一个所谓的粗瞄和一个精确指令。
所有FPSCE功能的全部低温冗余被实现。
FPSCE质量是7kg,尺寸在290X198X176mm3,功耗是35W。
4.7处理板上的PAT软件
安装在OBP上的一个功能部分是为了实现不需要FPSCE高速计算的PAT功能。
功能要求:
*FPSCE的模式管理。
*根据两宿主飞行器的轨道模型进行星历表计算。
*根据星历表和FPA位置测量产生粗瞄指令和精瞄位置测量。
*根据星历表和发射校正产生前向瞄准指令。
*产生精瞄扫描侧面。
*根据星历表和在跟踪中的实际视线在视线基础上估计偏差错误。
*根据来自于FPSCE和CPDE的遥感测量检测失败。
OBP基于一个GPSMAS281微处理器。
大多数PAT功能在50Hz下运行。
5:
PAT子系统设计
图六PAT子系统功能模块示意图
开环视线控制是根据星历表的粗瞄机制运行。
扫描通过光栅或者螺旋扫描。
通过在扫描线和扫描速度间进行必要重叠标出尺寸的总扫描时间对总捕获时间和根据光束发射单元温度增长在捕获间最小化时间是一个重要参数。
扫描速度通过开环LOS稳定性和LEO终端的开环辐射的必要时间(0.75s)标出尺寸。
捕获检测和接收LOS的修正分几个步骤进行。
1:
基于在给定临界值之上捕获敏感器上大多数被点亮像素产生了在GEO情况下从等待模式或者扫描模式到捕获模式和带来跟踪敏感器上的光斑的第一个FPA指令的转换。
临界值被设定对最坏情况寄生信号又一个极限,而且对最低辐射度仍有一个可检测的极限。
为了可检测提高可检测性,安装了捕获输出的空间滤波器。
FPA偏转步骤必须在15ms做出以限制开环瞄准漂移小于跟踪敏感器FOV。
2:
如果在第一步FPA之后在跟踪敏感器上没有检测到光斑,下一个捕获测量将用来产生第二个FPA命令。
3:
通过在给定值域之上跟踪敏感器的一个像素的检测,进行从捕获模式到重新整和模式的转变。
在整合模式中,驱动光斑进入跟踪敏感器中心的FPA指令基于大多数被点亮的像素。
4:
通过在四个中心像素之和减去四个边缘背景像素之后大于给定阈值的地方的三个连续检测,进行从整合模式到跟踪模式的转变。
在LEO终端上第一到第四步的持续时间是352ms。
这允许在有用信号到达之前闪烁影响等假的被点亮之后留给重新整合的时间。
在GEO终端,时间限制仅在第一步,包括分配给闪烁影响时间它共需62ms。
LEO和GEO时间限制之和乘以两倍的光运行时间给出了LEO终端必要的连续点亮时间(0.75sec)。
图七捕获和整合顺序,画图测量以跟踪敏感器视场(LEO情况下)
在跟踪模式下,基于跟踪敏感器四中心像素的形心处理,为把光斑保持在跟踪敏感器的中心,FPA被驱动。
当跟踪光束时,跟踪敏感器在4kHz被抽样,而每一次更高的电信到达则在8kHz抽样。
在跟踪阶段开始,围绕一个偏差的PFA位置进行跟踪(捕获阶段)。
PFA偏差通过粗瞄机制被卸下,而在跟踪中用PFA位置敏感器和星历表作为瞄准参考。
正如之前提到的,FPA命令被分隔成一个精瞄指令和一个±160mrad的粗瞄指令,每一个都有12位的分辨率。
为限制来自于粗瞄指令的质量误差,粗瞄指令被以逐步的方式归零,即它被保持连续且仅当精瞄指令值在适当的阈值时改变从而粗瞄指令中的一步能够用精瞄补偿。
粗瞄指令中的一步和精瞄指令中的“相反的一步”应该在理想情况下相等,但是为了DAC非线性,一个适当的瞄准瞬间发生。
通过步数引入的瞄准瞬间是为了在卸载过程中避免LEO终端瞬间辐射保持光束的重要性。
通过在LEO终端卸载过程中停在整合模式,GEO终端保持瞬间稳定性(在整合模式中视场总跟踪敏感器运行)。
精瞄的运动:
在LEO上±20mrad/12bits(int.),在GEO上±40mrad/12bits(int.)被计算从而保持在跟踪过程中粗瞄为零。
计算参数是卫星运动和粗瞄平台的有限带宽。
精瞄环的剔除带宽通过敏感器延迟、FPSCE延迟、FPA带宽和在环中产生的震动稳定性被限制在大概150Hz。
QD上的高准确性通过用四个临近像素来估计背景水平和熄灭当前非均匀校准来获得。
图八四象限检测过程
与接收到的有关的传播光束的瞄准是开环过程。
送到PAA的前向瞄准角通过在两个宿主卫星的轨道模型基础上在OBP中计算得到。
为了降低在跟踪路径和发射路径之间的偏差,当需要PAA计算因素时,一个周期性的偏差校准通过向共同路径上引进回射角来进行从而将发射光束指向跟踪敏感器。
6:
地面验证
瞄准要求来自于光学和通信子系统,从而限制来自于宿主卫星姿态和微振动轮流作用。
由于相关的小空白和在终端和宿主平台的相互影响,验证PAT子系统对宿主平台表面规格的表现不够充分,同样一旦终端设计存在运动相互影响必须进行验证。
采取以下步骤:
*低频连接分析。
*微振动连接分析和测试。
*PAT操作验证通过仿真和测试完成。
图九PAT子系统验证系统测试床
在一个由偏转测量贡献的测试平台上验证瞄准功能。
在跟踪测量光束和终端发射光束之间的差别测量通过确定位置敏感装置的微位置变动实现,从而有零测量。
考虑光学头,PSD轴必须被准确参考从而在围绕测试光束的轴上有一个参考。
图十偏转测量的测试装置
读者一定会注意到PAT子系统的基线验证依赖于粗瞄机制和终端低频结构动力学的正确仿真,分别以在连接水平上测试和微振动测试为特点。
进一步,跟踪真正运动(大约在轴上)过程中在跟踪敏感器上望原系统光斑形状造成的运动影响在终端水平上没有测试。
因此一个终端瞄准系统没有被研究。
要解决的主要问题是重力和连接部分角度运动的补偿,从而允许终端跟踪和瞄准一个非惰性的固定测试台。
7:
结论
光学星间通信在许多情况下给瞄准、捕获、跟踪的要求冲突需求冲突施加极限,例如一个比开始不确定圆锥小的信标光束分岔,一个不确定的圆锥比所需通信精度四阶放大,在有界面从低频高幅姿势错误到高频微抖动运动出现下的小于μrad瞄准。
瞄准系统分两阶段已经放弃了复杂的要求:
粗瞄与精瞄装备和捕获与跟踪敏感器。
甚至将精瞄阶段分成两个也成为必要,即一个精瞄和一个粗瞄指令来控制一个精瞄装备和用两种不同的模式应用跟踪敏感器。
系统的稳定性控制通过一个高速数字信号处理器实施。
大多数装备都获得环境和有效时间质量。
通过集成在代表终端的装备的工程模型测试,完成了子系统表现验证的一个重要步骤,尽管是在一个有效利用的配置中。
进一步地低频振动连接了分析和微振动测试,分析已经证实在SPOT4情况下子系统表现充分。
目前飞行硬件已经被集成,对飞行光学头的测试已经在1995年二月开展计划。
8:
答谢
这篇论文中报道的工作是欧空局主持,MatraMarconiSpace(F)作为首席承包商,大量协作承包商如MMS(F)、MMS(UK)、SIRA(UK)、SCHRACK(A)和TELDIX(D)一起完成。
此论文通过参考由MMS(F)确立的PAT子系统分析和设计报告和装配承包商确立的装配设计和测试报告而写。
 升级会员
升级会员 