单片机C语言程序设计实验指导书.docx
《单片机C语言程序设计实验指导书.docx》由会员分享,可在线阅读,更多相关《单片机C语言程序设计实验指导书.docx(15页珍藏版)》请在冰豆网上搜索。
单片机C语言程序设计实验指导书
实验一发光二极管的移动控制
一、实验目的
1.熟悉并行接口的设置与应用;
2.进一步熟悉编译软件和下载软件的使用;
3.熟悉C语言中移位、延时、数组等指令的应用;
4.增强学习单片机的兴趣。
二、实验内容
1.参考课本P128“发光二极管的移动控制”实验程序,实现发光二极管循环点亮的按键控制。
2.设计一个完整程序(另建一个文档),实现8个led灯的自动顺序(加法)点亮和逆序(减法)点亮。
见参考程序,并在程序中添加必要的解释文字。
三、实验步骤
1.以班级和姓名为文件夹名称在D盘根目录下新建一个子目录文件夹,用来保存每次实验的项目和程序。
(注意:
每次实验的位置固定,即下次实验的计算机还是上次的计算机。
)
2.再在这个子目录下以实验题目为名新建一个文件夹。
打开ICCAVR开发编程软件,新建一个工程文件项目,参照程序清单或根据实验要求自己重新修改设置并输入程序。
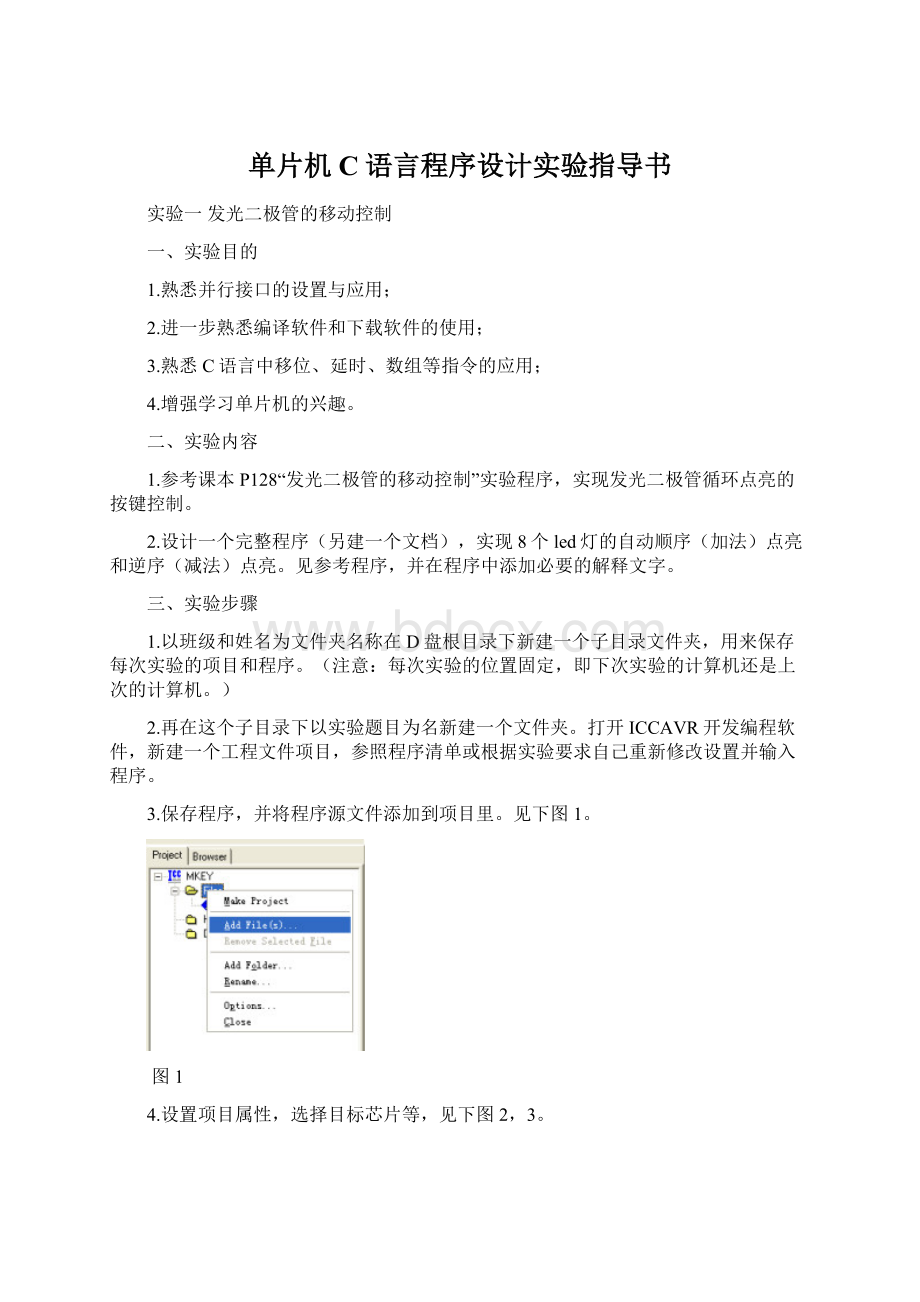
3.保存程序,并将程序源文件添加到项目里。
见下图1。
图1
4.设置项目属性,选择目标芯片等,见下图2,3。
图2图3
5.编译程序。
将所输入的程序进行编译(菜单Project→Make命令),或者在工具栏单击
按钮),若编译时下方出现错误提示,说明程序有语法错误,此时必须根据编译器所列出的错误消息,逐条查改,重新编译,直到错误消除并生成*.hex文件。
6.功能仿真。
利用proteus或AVRstudio的仿真功能对程序进行功能性仿真,验证程序功能是否正确。
7.打开下载软件(progisp或AVRStudio里的JTAGICE),将刚刚生成的相应*.hex文件写入单片机(在此之前,须将单片机实验板按要求与PC机连接正确,并接通电源)。
8.验证硬件实现的结果是否与功能要求一致。
四、参考程序(实现8个led灯的自动顺序(加法)和逆序(减法)点亮的部分程序)
/***********************
系统外接8M晶振
************************/
unsignedchari;
while
(1){
for(i=0;i<8;i++){
PORTB=~(1<delay_ms(200);
}
for(i=8;i>0;i--){
PORTB=~(1<delay_ms(200);
}
}
实验二0~99数字的加减控制
一、实验目的
1.熟悉并行接口的设置与应用;
2.进一步熟悉编译软件和下载软件的使用;
3.熟悉十进制数各个位在数码管上显示的编程方法;
二、实验内容
1.参照课本P131“0~99数字的加减控制”的程序,实现按键对数字的加减控制功能(因实验板上数码管与PC口的连接方式和书本中的连接不一致,须修改源程序,具体见实验电路分析部分)。
2.假如需要控制0~999数字的加减控制,请重新设计一个程序实现该功能。
三、实验电路
本实验的电路连接如下图所示1。
注意:
本图中高位数码管连接低位PC口,低位数码管连接高位PC口,即图中第1位(最左边)数码管连接PC0,第2位数码管连接PC1,…,第8位(最右边)数码管。
与课本的实验电路连接方式不一致,故在程序设计中需要修改数码管的位选端。
高位
数码管
低位
数码管
图1键控计数电路
四、实验步骤
参照实验一的实验步骤过程。
1.参照课本P131,通过ICCAVR编译后生成*.HEX文件,并利用proteusISIS仿真程序实现的功能。
2.在不修改数码管位选端的情况下,观察程序执行结果。
3.分别修改数码管的个位和十位位选端,使数码管上显示的结果正常。
4.如要使数字的显示从数码管的最低位开始显示,重新设计数码管的个位和十位位选端编码。
5.若要控制0~999数字的加减控制,设计数码管的BCD转换。
五、部分参考程序
1.实验板上各个数码管的位选端数组为:
ACT[8]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}//数码管从高位到低位显示//的排列编码
2.数码管BCD转换:
PORTA=SEG7[counter%10];//显示counter变量的个位
PORTC=ACT[0];//选通个位数码管
delay_ms
(1);
PORTA=SEG7[counter/10%10];//显示counter变量的十位
PORTC=ACT[1];//选通十位数码管
delay_ms
(1);
PORTA=SEG7[counter/100];//显示counter变量的百位
PORTC=ACT[2];//选通百位数码管
delay_ms
(1);
实验三脉宽调制(PWM)实验
一、实验目的
1.进一步了解脉宽调制的意义,熟悉脉宽调制的原理;
2.掌握脉宽调制的设置与应用;
3.能解读程序。
二、实验内容
1.参照课本P234“PWM测试实验”的程序,实现按键S1、S2对PWM的输出控制。
(1)编译通过后,进行软件仿真。
在ProteusISIS里利用LCD1602观察显示内容是否正确,并用虚拟示波器(OSCILLOSCOPE)观察OC2引脚(PD7)输出的PWM信号是否正常。
见下图。
注意:
开始仿真后,必须按下S1才有PWM波输出。
(2)用数字万用表检测OC2脚(PD7),观测输出电压是否与LCD指示的相符,并填入下表。
OCR2值
LCD显示的电压值(
)
数字万用表显示的电压值(V)
2.修改源程序(P234~P236),使输出脉宽是自动变化的。
部分参考程序如下:
while
(1){
unsignedchari;
i=255;
while(i){
OCR2=i;
Delay_nms(50);
i--;
}
i=1;
while(i){
OCR2=i;
Delay_nms(50);
i++;
}
}
三、附LCD1602驱动参考程序
(注:
本驱动是在课本P182~185基础上进行修改的,目的是删除驱动程序中的检测LCD忙信号函数及与其相关语句,使仿真和显示正常。
)
/*******LCD1602液晶驱动程序***************/
#include
#include
#definextal8
#definePB00
#definePB11
#definePB22
//----------------------------
#defineucharunsignedchar
#defineuintunsignedint
#defineSET_BIT(x,y)(x|=(1<#defineCLR_BIT(x,y)(x&=~(1<#defineGET_BIT(x,y)(x&=(1<//-------端口电平的宏定义------------
#defineLCM_RS_1SET_BIT(PORTB,PB0)
#defineLCM_RS_0CLR_BIT(PORTB,PB0)
#defineLCM_RW_1SET_BIT(PORTB,PB1)
#defineLCM_RW_0CLR_BIT(PORTB,PB1)
#defineLCM_EN_1SET_BIT(PORTB,PB2)
#defineLCM_EN_0CLR_BIT(PORTB,PB2)
//------------------------------
#defineDataPortPORTA
#defineBusy0x80
//**********函数声明********************
voidDelay_1ms(void);
voidDelay_nms(uintn);
voidLcdWriteData(ucharW);
voidLcdWriteCommand(ucharCMD);
voidInitLcd(void);
voidDisplayLine2(uchardd);
voidDisplayOneChar(ucharx,uchary,ucharWdata);
voidePutstr(ucharx,uchary,ucharconst*ptr);
/***********显示指定坐标的一串字符子函数************/
voidePutstr(ucharx,uchary,ucharconst*ptr)
{
uchari,l=0;
while(ptr[l]>31){l++;}
for(i=0;iDisplayOneChar(x++,y,ptr[i]);
if(x==16){
x=0;y^=1;
}
}
}
//**********演示第二行移动字符串子函数************
voidDisplayLine2(uchardd)
{
uchari;
for(i=0;i<16;i++){
DisplayOneChar(i,1,dd++);
dd&=0x7f;
if(dd<32)dd=32;
}
}
//***********显示光标定位子函数******************
voidLocateXY(charposx,charposy)
{
uchartemp=0;
temp&=0x7f;
temp=posx&0x0f;
posy&=0x01;
if(posy)temp|=0x40;
temp|=0x80;
LcdWriteCommand(temp);
}
//**********显示光标定位的一个字符子函数***********
voidDisplayOneChar(ucharx,uchary,ucharWdata)
{
LocateXY(x,y);
LcdWriteData(Wdata);
}
//***********LCD初始化子函数******************
voidInitLcd(void)
{
LcdWriteCommand(0x38);//显示模式设置(固定),8位数据接口
Delay_nms(5);
LcdWriteCommand(0x01);//清屏
Delay_nms(5);
LcdWriteCommand(0x0c);//开显示,不显示光标
Delay_nms(5);
}
//************写命令到LCM子函数************
voidLcdWriteCommand(ucharCMD)
{
LCM_RS_0;LCM_RW_0;
DataPort=CMD;
LCM_EN_1;Delay_nms
(1);LCM_EN_0;
}
//************写数据到LCM子函数*************
voidLcdWriteData(uchardataW)
{
LCM_RS_1;LCM_RW_0;
DataPort=dataW;
LCM_EN_1;Delay_nms
(1);LCM_EN_0;
}
//***********1ms延时子函数*******************
voidDelay_1ms(void)
{uinti;
for(i=1;i<(uint)(xtal*143-2);i++)
;
}
//=============n*1ms延时子函数================
voidDelay_nms(uintn)
{
uinti=0;
while(i{Delay_1ms();
i++;
}
}
实验四0~5V数字式直流电压表
一、实验目的
1.掌握A/D转换程序的设计;
2.掌握数据采集与显示的应用;
3.掌握数据处理的方法;
二、实验内容
1.参照课本P383页“0~5V数字式直流电压表实验”程序,并编译、仿真,见下图所示。
注意:
由于用proteusISIS仿真时,数码管模型显示的闪烁现象和缓存现象,需要对其进行短延时和清屏,否则,显示将出现乱码现象。
可在main()主函数里加入两条语句:
Delay
(1);
PORTA=0;
(1)修改错误。
比较程序第25行“ADMUX=0XC7”以及程序第71行“x=(5000*(long)i)/1023”所指参考电压不一致,导致输入模拟电压值与数码管显示电压值不一致,有哪几种修改方案。
如把ADMUX=0XC7改为0X07。
(2)调节电位器(POT-LOG),观察数码管显示的电压值与虚拟直流电压表显示的电压是否一致。
2.将编译通过后的程序烧写到单片机里,调节AD电位器,观看开发板上数码管的显示情况。
注意数码管的位选端排列顺序,实验板与课本电路图中数码管排序不同,故需要调整位选端。
3.如果想观察ADC转换后的数字结果,则需将数码管显示改为:
PORTA=SEG7[adc_val%10];
………
依次类推。
三、拓展实验
把数码管显示改为LCD1602液晶显示。
(可参考P240“0~5V数字电压调整器”lcd部分程序内容)
注意:
因使用PA7为输入端口,而PA口为原电路中LCD1602的数据端口,故把数据端口改为PC口,注意要把lcd1602液晶的驱动程序“lcd1602_8bit.c”中的语句“#defineDataPortPORTA”改为“#defineDataPortPORTC”。
ProteusISIS仿真图如下图。
四、附使用LCD1602显示ADC参考程序
#include
#include"lcd1602_8bit.c"
ucharconsttitle[]={"0-5vD_voltager"};
#defineucharunsignedchar
#defineuintunsignedint
uintadc_val,dis_val;
uchari,cnt;
/************************************************/voidport_init(void)
{
PORTA=0x7F;
DDRA=0x7F;
PORTB=0xFF;
DDRB=0xFF;
PORTC=0xFF;
DDRC=0xFF;
PORTD=0xFF;
DDRD=0xFF;
}
/************************************************/voidadc_init(void){
ADCSRA=0xE3;
ADMUX=0x47;}
//***************************voidtimer0_init(void){
TCNT0=0x83;
TCCR0=0x03;
TIMSK=0x01;
}
/*********************************************/voidinit_devices(void)
{
port_init();
timer0_init();
adc_init();
SREG=0x80;
}
//***************************
#pragmainterrupt_handlertimer0_ovf_isr:
10
voidtimer0_ovf_isr(void)
{
TCNT0=0x83;
cnt++;
}
//=========================
uintADC_Convert(void)
{uinttemp1,temp2;
adc_init();
temp1=(uint)ADCL;
temp2=(uint)ADCH;
temp2=(temp2<<8)+temp1;
return(temp2);
}
/**************************/
uintconv(uinti)
{
longx;
uinty;
x=(5000*(long)i)/1023;
y=(uint)x;
returny;
}
voiddelay(uintk)
{
uinti,j;
for(i=0;i{
for(j=0;j<1141;j++);
}
}
/***********************/voidmain(void)
{
init_devices();
Delay_nms(400);
DDRA=0X7F;PORTA=0X7F;
DDRC=0XFF;PORTC=0X00;
DDRB=0XFF;PORTB=0X00;
InitLcd();
ePutstr(1,0,title);
DisplayOneChar(0,1,'A');
DisplayOneChar(1,1,'D');
DisplayOneChar(2,1,'C');
DisplayOneChar(3,1,'7');
DisplayOneChar(4,1,':
');
DisplayOneChar(11,1,'.');
DisplayOneChar(15,1,'V');
while
(1)
{
if(cnt>100)
{
adc_val=ADC_Convert();
dis_val=conv(adc_val);
cnt=0;
}
delay(10);
DisplayOneChar(5,1,(adc_val/1000)+0x30);
DisplayOneChar(6,1,(adc_val/100)%10+0x30);
DisplayOneChar(7,1,(adc_val/10)%10+0x30);
DisplayOneChar(8,1,(adc_val%10)+0x30);
DisplayOneChar(10,1,(dis_val/1000)+0x30);
DisplayOneChar(12,1,(dis_val/100)%10+0x30);
DisplayOneChar(13,1,(dis_val/10)%10+0x30);
DisplayOneChar(14,1,(dis_val%10)+0x30);
}
}
 升级会员
升级会员 