计算机控制答案附精要.docx
《计算机控制答案附精要.docx》由会员分享,可在线阅读,更多相关《计算机控制答案附精要.docx(7页珍藏版)》请在冰豆网上搜索。
计算机控制答案附精要
第一章
5.
.
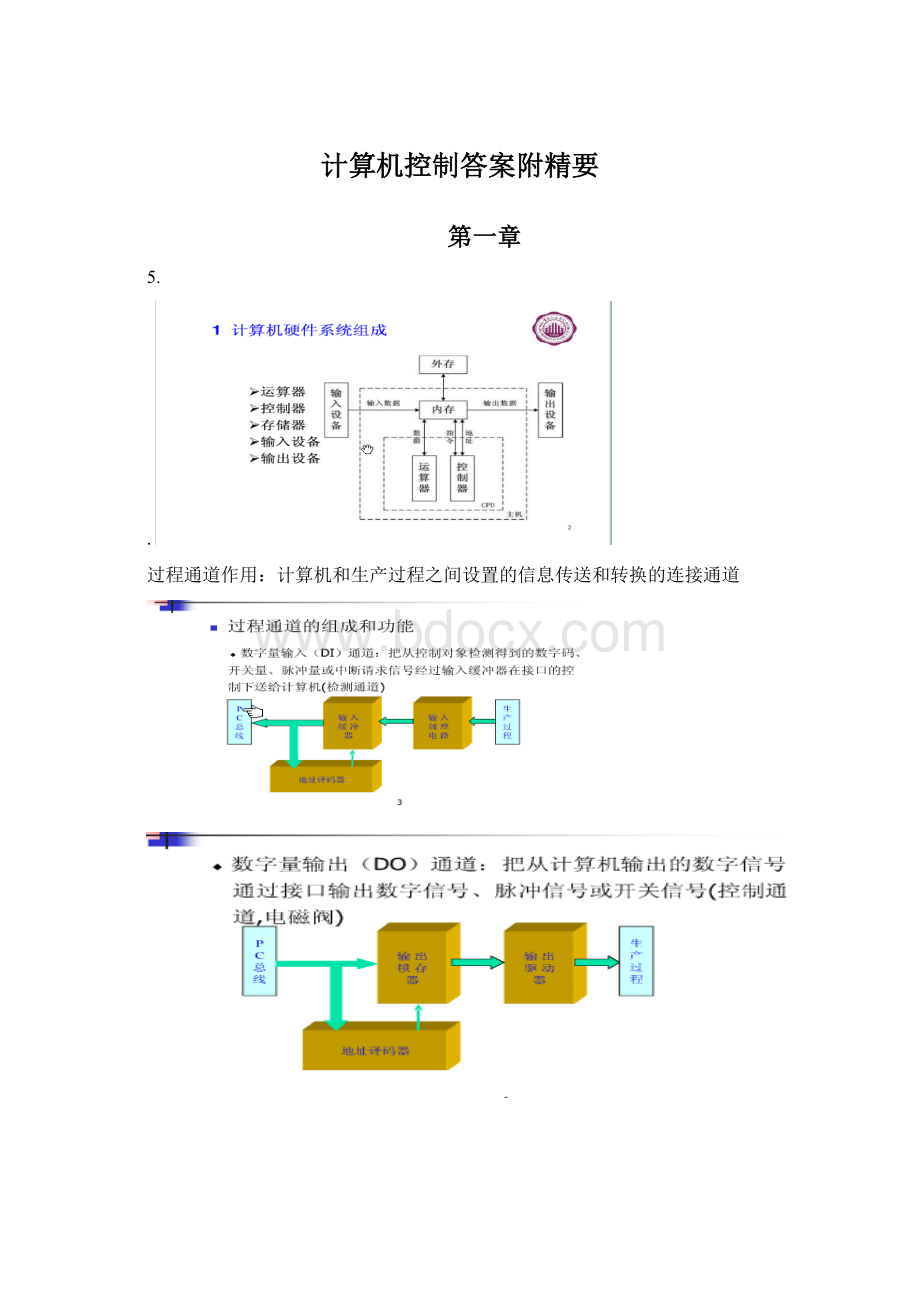
过程通道作用:
计算机和生产过程之间设置的信息传送和转换的连接通道
计
算
机
被
控
对
象
8.计算机控制系统由计算机、外部设备、操作台、输入通道、输出通道、检测装置、执行机构、被控对象以及相应的软件组成,如图1.4所示。
9.1.计算机操作指导控制系统:
计算机只承担数据的采集和处理工作,而不直接参与控制
2.直接数字控制系统(DDC):
由控制计算机取代常规的模拟调节仪表而直接对生产过程进行控制,由于计算机发出的信号为数字量
3.监督计算机系统(SCC):
计算机监督控制系统是针对某一种生产过程,依据生产过程的各种状态,按生产过程的数学模型计算出生产设备应运行的最佳给定值,并将最佳值自动地或人工对DDC执行级的计算机或对模拟调节仪表进行调正或设定控制的目标值
4.集散控制系统:
由多台计算机分别控制生产过程中多个控制回路,同时又可集中获取数据和集中管理的自动控制系统
5.计算机分级控制系统:
将控制任务分散,用多台计算机分别执行不同的任务,既能进行控制又能实现管理
14.开环例子
闭环例子
第四章
1.最少拍系统是在最少的几个采样周期内达到在采样时刻输入输出无误差的系统
不足:
对系统要求较高
(1)对于特定的参考输入信号,达到稳态后,系统在采样时刻精确实现对输入的跟踪
(2)系统以最快速度达到稳态
(3)D(z)应是物理可实现的
(4)闭环系统影视稳定的
第五章
2.
(1)增量型算法不需做累加,计算误差后产生的计算精度问题,对控制量的计算影响较小。
位置型算法用到过去的误差的累加,容易产生较大的累加误差。
(2)增量型算法得出的是控制的增量,不会影响系统的工作。
位置型算法的输出是控制量的全部输出,误动作影响大
根本区别:
位置式需要控制量的全值,增量型需要控制的增量
第八章
1.纯滞后对象的控制、串级控制、解耦控制、前馈控制
前馈控制特点:
前馈控制,实质上是一种直接按照扰动量而不是按偏差进行校正的控制方式,即当影响被控参数的干扰一出现,控制器就直接根据所测得扰动的大小和方向按一定规律去控制,以抵消该扰动量对被控参数的影响。
在控制算式及参数选择恰当时,可以使被控参数不会因干扰作用而产生偏差,所以它比反馈控制要及时得多。
8.
设系统的开环传递函数矩阵为Gc(s)(n×n维),闭环传递函数矩阵为W(s)(n×n维),则有
对于多输入多输出系统,要求各个控制回路相互独立无耦合作用,则要求系统闭环传递函数为对角阵,即
由于闭环传递函数W(s)为对角阵,因此要求系统开环传递函数Gc(s)也为对角阵。
又因为控制器D(s)也为对角阵,所以,需要求F(s)G(s)为对角阵。
设计要求是根据被控制对象的传递函数G(s),设计一个解耦控制器F(s)使得F(s)G(s)也为对角阵。
 升级会员
升级会员 