4第3章有限元分析的力学基础.docx
《4第3章有限元分析的力学基础.docx》由会员分享,可在线阅读,更多相关《4第3章有限元分析的力学基础.docx(21页珍藏版)》请在冰豆网上搜索。
4第3章有限元分析的力学基础
第3章有限元分析的力学基础
由固体材料组成的具有一定形状的物体在一定约束边界下(外力、温度、位移约束等)将产生变形(deformation),该物体中任意一个位置的材料都处于复杂的受力状态之中,本章将定义用于刻画
任意形状弹性变形体的力学变量和表达这些变量之间的关系。
具体地,将在五个简化条件下,定义有关位移、变形、力的三大类变量,推导这些变量之间的三大类方程,给出典型的两类边界条件,本章的主要内容就是弹性力学中的基础部分。
3.1变形体的描述、变量定义、分量表达
3.1.1变形体
在外力的作用下,若物体内任意两点之间发生相对移动,这样的物体叫做变形体(deformed
body),它与材料的物理性质密切相关。
如果从几何形状的复杂程度来考虑,变形体又可分为简单形
状变形体和任意形状变形体。
简单变形体如杆、梁、柱等,材料力学和结构力学研究的主要对象就是简单变形体,而弹性力学则处理任意形状变形体。
有限元方法所处理的对象为任意形状变形体,
因而,弹性力学中有关变量和方程的描述将是有限元方法的重要基础。
3.1.2基本变量
当一个变形体受到外界的作用(如外力或约束的作用)时,如何来描述它?
首先,我们可以观察到
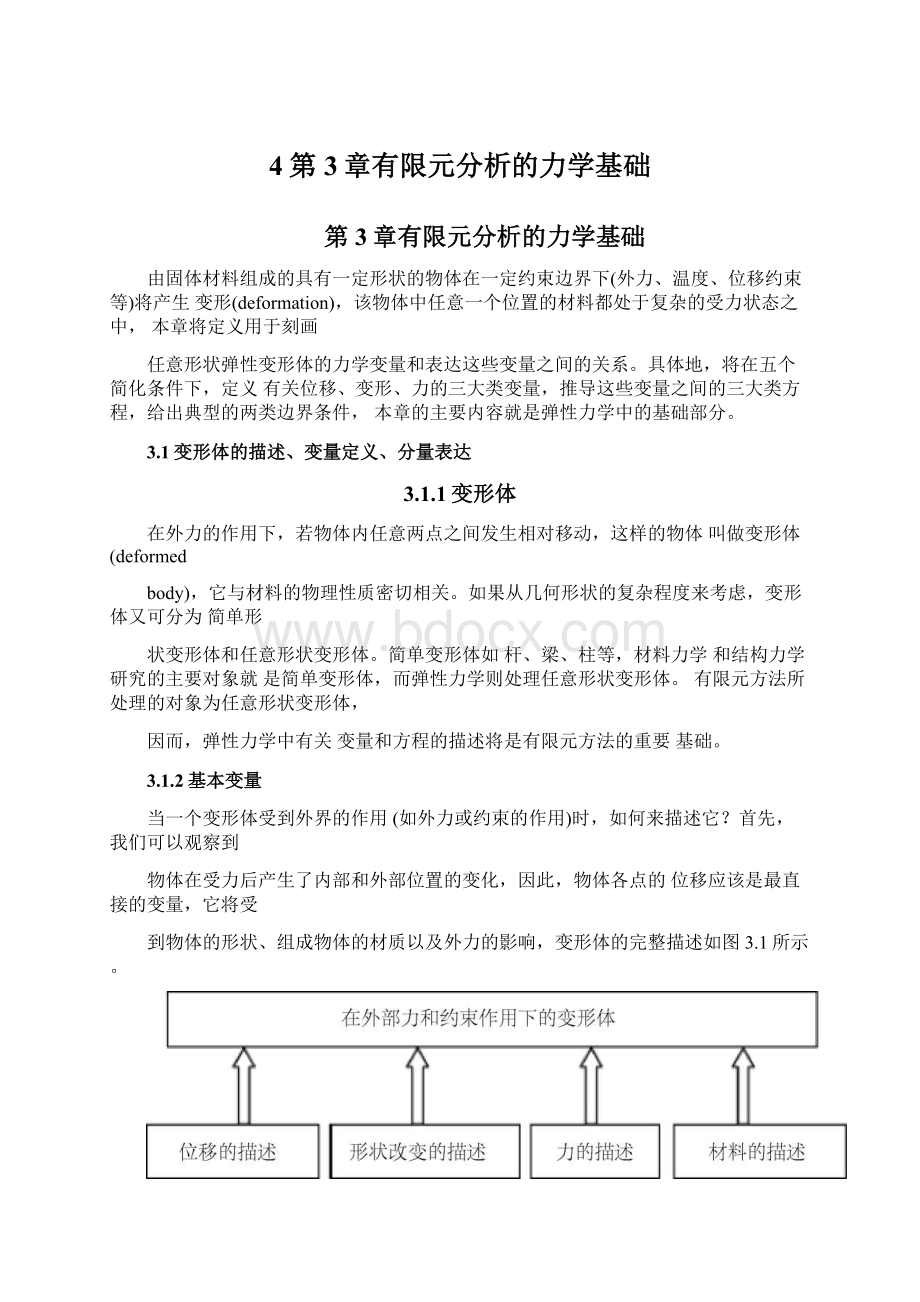
物体在受力后产生了内部和外部位置的变化,因此,物体各点的位移应该是最直接的变量,它将受
到物体的形状、组成物体的材质以及外力的影响,变形体的完整描述如图3.1所示。
图3.1变形体的描述
描述位移是最直接的,因为可以直接观测,描述力和材料特性是间接的,需要我们去定义新的变量,如图3.2所示,可以看出应包括位移、变形程度、受力状态这三个方面的变量,当然,还应
有材料参数来描述物体的材料特性。
位移
■
物体变形后的位置
应变
■
物体的变形程度
应力
物体的受力状态
材料参数物体的材料特性
图3.2变形体的描述及所需要的变量
总之,在材料确定的情况下,基本的力学变量应该有:
•位移(displacement)(描述物体变形后的位置)
•应变(strain)(描述物体的变形程度)
•应力(stress)(描述物体的受力状态)
对于任意形状的变形体,我们希望建立的方程具有普遍性和通用性,因此,采用微小体元
(representativevolume)dxdydz的分析方法来定义位移、应变、应力这三类变量。
3.1.3基本方程
受外部作用的任意形状变形体,在其微小体元dxdydz中,基于位移、应变、应力这三大类变量,
可以建立以下三大类方程:
•受力状况的描述:
平衡方程(equilibriumequation)
•变形程度的描述:
几何方程(strain-displacementrelationship)
•材料的描述:
物理方程(应力应变关系或本构方程)(stress-strainrelationshiporconstitutive
equation)
3.2弹性体的基本假设
为突出所处理问题的实质,并使问题有得以简单化和抽象化,在弹性力学中,提出以下五个基
本假定。
(1)物体内的物质连续性(continuity)假定,即认为物质中无空隙,因此可采用连续函数来描述对象。
(2)物体内的物质均匀性(homogeneity)假定,即认为物体内各个位置的物质具有相同特性,因此,
各个位置材料的描述是相同的。
(3)物体内的物质(力学)特性各向同性(isotropy)假定,即认为物体内同一位置的物质在各个方向上具有相同特性,因此,同一位置材料在各个方向上的描述是相同的。
(4)线弹性(linearelasticity)假定,即物体变形与外力作用的关系是线性的,外力去除后,物体可恢复原状,因此,描述材料性质的方程是线性方程。
(5)小变形(small)假定,即物体变形远小于物体的几何尺寸,因此在建立方程时,可以忽略高
阶小量(二阶以上)。
以上基本假定和真实情况虽然有一定的差别,但从宏观尺度上来看,特别是对于工程问题,大多数情况下还是比较接近实际的。
以上几个假定的最大作用就是可以对复杂的对象进行简化处理,以抓住问题的实质。
3.3平面问题的基本力学方程
平面问题(2-dimensionalproblem),简称2D问题。
对于一个待分析的对象,包括复杂的几何形状、给定的材料类型、指定的边界条件(受力和约束
状况)。
如前所述,描述这样的对象需要三大类变量、三大类方程和边界条件。
三大类方程为
•力的平衡方程(变形体的内部)
•几何变形方程(变形体的内部)
•材料的物理方程(变形体的内部、边界)
边界条件为
•位移方面(变形体的边界)
•外力方面(变形体的边界)
3.3.1三大类方程之一:
力的平衡方程
1•微小体元上的平面应力分量
平面问题实际上是空间问题的一种特殊情况,即物体在厚度方向(Z)上较薄,因此,认为在沿厚度方向上各种应力很小(或为零),可以忽略。
设在变形体上的任意一点a(x,y)取一个微小体元dxdy_
t(注意t为厚度),如图3.4所示,每一个侧面上的任意力(单位面积上的)都可以分解为沿x方向和沿
y方向的力,对于垂直于侧面上的力(即沿着所在平面的法线方向)叫做正应力(normalstress),而位于
侧面内的力(即沿着所在平面的切线方向)叫做剪应力(shearstress)。
对于图3.4所示的几何体,be边与厚度t组成的侧面我们记作be_t,它与ad_t侧面在x方向上相差dx的距离,而ed_t侧面与ab_t
侧面在y方向上相差dy的距离。
下面给出各个侧面上的应力定义:
其中Ay表示法线方向沿y轴的平面,Px为作用在Ay面上合力沿着x方向的分量,若用指标符号
来表示yx,可写成21。
若改变(3.1)式中的下标,可以得到各个侧面上沿各个方向的应力。
应力符号有两个下标,第一个下标表示受力面的法线方向,第二个下标表示力的方向,如图3.3
所示。
对于图3.4所示的微小体元dxdy_t,其各个受力面上的所有应力都标注在该图中。
图中的bx和
图3.3应力符号的含义
图3.4空间坐标系中的平面问题(z方向无任何力,其等厚度为t)
在推导平衡方程之前,做好以下准备。
准备1应力的增量计算
在推导平衡方程时,需要计算不同位置截面上的应力,不同截面的几何位置将有一个dx或dy
的差别,以xx为例,由高等数学中的
Taylor级数展开,
有
xx(xdx,y)
xx(x,y)
2
xx(x,y)dx
x
xx(x,y)2
2(dx)2
2x2
(3.2)
略去二阶以上微量,有
xx(xdx,y)
xx(x,y)
xx(x,y)
dx
x
(3.3)
A
A
准备2:
应考虑各个方向合力的平衡
在表达各个面上的合力时应注意以下几点:
1有四个侧面,在平衡方程中,应考虑所有合力的平衡;
2应力在经过dx或dy变化后的位置上有增量表达;
3约定:
正应力沿外法线方向为正,剪应力的正方向如图3.4所示;
4应力在各个侧面上为均匀分布。
2.微小体元的几个平衡关系
对如图3.4所示的微小体元dxdy_t(平面问题),应考虑以下平衡关系:
①沿x方向所有合力的平衡;
2沿y方向所有合力的平衡;
3所有合力关于任一点的力矩平衡。
就平衡关系①,有
具体地,有
xx(xdx,y)dytxx(x,y)dytyX(x,ydy)dxtyX(x,y)dxtbxdxdyt0
其中bx和by分别为沿x方向和y方向的单位体积力。
利用(3.3)式,上式化为
xxdxdytxxdyt
yx
yx
dydxt
x
y
yxdxtbxdxdyt0
(3.5)
进一步化简后,有
by
(3.7)
(3.8)
xx
竺bx0
(3.6)
x
y
同理,就平衡关系②,
由Fy0,有
yyxy
略去高次项后,有
xyyx
(3.9)
这就是剪应力互等定理(reciprocaltheoremofshearstress)。
因此,以后可以将这一关系直接引用到方
程中去。
3•微小体元的平衡方程
归纳以上的推导,平面问题的平衡方程为
xyyx
3.3.2三大类方程之二:
变形的几何方程
设一个变形体微小体元的平面直角在变形前为APB,而变形后为APB,P点变形到P点的x
方向位移为u,y方向位移为v,如图3.5所示。
图3.5平面问题中的变形表达
1.平面变形量(应变)的定义
从图3.5可以看出,平面物体在受力后,其几何形状的改变主要在两个方向:
沿各个方向上的
长度变化以及夹角的变化,下面给出具体的描述。
(1)定义x方向的相对伸长量为
u.
dx
PAPAxu
xx
PAdxx
(3.13)
(2)定义y方向的相对伸长量为
PBPB
Vdyy
v
yy
dy
(3.14)
PB
y
(3)定义夹角的变化PA线与PA线的夹角为
v
v—dxv
xv
(3.15)
dxx
PB线与PB线的夹角为
u—dyu
yu
dyy
则定义夹角的总变化为
(3.17)
uv
xy
yx
平面变形体的几何方程
归纳以上方程,则平面问题中定义应变的几何方程为
u
xx
x
yy
v
y
uv
(3.18)
xy
yx
写成指标形式
ij
1
-Ui,jUj,i
(3.19)
由几何方程可以看出,就平面问题,如果已知2个位移分量u和v,可以通过(3.18)式惟一求出
3个应变分量。
但如果是一个反问题,即已知3个应变分量是,就不一定能够惟一求出2个位移分
量u和v,除非这3个应变分量满足一定的关系,这个关系就是变形协调条件(compatibilitycondition),
其物理意义是,材料在变形过程中应是整体连续的,不应出现“撕裂”和“重叠”现象,如图3.6
所示。
基于几何方程,可以推导出变形协调条件为
只有满足了变形协调条件(3.21)的应变分量或应力分量(该方程也可通过物理方程用应力分量来表
达),才能惟一确定变形体的连续位移场。
333三大类方程之三:
材料的物理方程
写成矩阵形式为:
为泊松比(Poission'ratio),且有关系
(3.24)
E
2
(1)
3.3.4边界条件
边界条件(boundarycondition),简称BC。
一般包括位移方面和力平衡方面的边界条件,对于变
形体的几何空间,其外表面被位移边界和力边界完全不重叠地包围,即有关系=Su+Sp,其中Su
为给定的位移边界,Sp为给定的力边界。
1.位移边界条件
在平面问题中,有关于x方向和y方向的位移边界条件,即
(3.25)
在Su上
其中u和v为在Su上指定的沿x方向和y方向的位移,Su为给定的位移边界。
2.力的边界条件
对于如图3.7所示的力边界条件,px和Py可分为所作用的沿x方向和y方向的面力,在力的边
界上取微小体元dxdy_t(平面问题)并考察它的平衡问题。
图3.7边界条件
由微小体元的x方向合力平衡,有
(3.26)
注意ds为边界上斜边的长度,边界外法线
xxdytyxdxtPxdst0
n的方向余弦为nxdy/ds,nydx/ds,则上式简化为
同样,可建立y方向合力和力矩的平衡方程;将微小体元的三个平衡方程汇总,有
xyyx
xxnxyxny
Px
在Sp上
yynyxynx
Py
3.边界条件汇总
将位移边界条件记为
BC(u),
将力边界条件记为
BC(u)ui
ui
在Su上
(3.29)
BC(p)。
综上所述,将边界条件写成指标形式。
(3.30)
(3.31)
BC(p)小Pi在Sp上
其中n为边界一点上外法线的方向余弦。
3.4空间问题的基本力学方程
空间问题(3-dimensionalproblem),简称3D问题。
可将2D问题的基本方程推广到3D问题,图
3.8为3D情形下的应力分量。
图3.8空间问题中的应力分量
3.4.1空间问题的基本力学变量
空间问题变形体中任意一点的位移有沿x方向、y方向、z方向的位移分量,即位移分量为(u,
v,w),而应力分量有9个,见图3.8,由剪应力互等,有xyyx,yzzy,zxxz,因此独立
的应力分量为6个,应变分量的情况与应力相冋,空间问题
三大类变量汇总如下
位移分量:
uVW
应变分量:
xxyyzzxyyzzx
应力分量:
xxyyzzxyyzzx
3.4.2空间问题的三大类力学方程和边界条件
可以完全按平面问题的推导方法,或直接将2D情形下的方程进行扩展得到以下方程。
(1)平衡方程
xx
yx
zx
bx
0
x
y
z
xy
yy
zy
—
0
by
(3.32)
x
y
z
xz
yz
zz
bz
0
x
y
z
(2)几何方程
或写成另一种形式
(3.33)
以上变量和方程是针对从任意变形体中所取出来的dxdydz微小体元来建立的,因此,无论所研
究对象(变形体)的几何形状和边界条件有何差异,但基本变量和基本方程是完全相同的,不同之处在
于变形体的几何形状和边界条件BC(u)及BC(p),所以,针对一个给定对象进行问题求解的关键是
如何处理变形体的几何形状和边界条件。
3.5弹性问题中的能量表示
弹性问题中的自然能量包括两类:
①施加外力在可能位移上所做的功,②变形体由于变形而存
储的能量。
出于研究的需要,还要定义一些由自然能量所组成的物理量,如势能(以位移为基本变量的表达卜
余能(以应力为基本变量的表达)等,下面分别给出具体的表达式。
3.5.1外力功
外力功也叫做可能功,即所施加外力在可能位移上所做的功,外力有两种,包括作用在物体上
的面力和体力。
这些力被假设为变形无关的不变力系,即为保守力系,则外力功(workbyforce)包
括这两部分力在可能位移上所做的功。
①在力边界条件上,由外力(面力)Pi在对应位移ui上所做的功(在Sp上)。
内)
②在问题内部,由体积力bj在对应位移ui上所做的功(在
则外力的总功为
(3.39)
3.5.2应变能
图3.9正应力与正应变产生的应变能
另外两个方向上的主应力和主应变(yy与yy,zz与zz)所产生的应变能与上面的计算公式类似。
2.对应于剪应力与剪应变的应变能
先考虑一对剪应力与剪应变,如图3.10所示,假设在微小体元dxdydz上只作用有xy与xy,这
时微体的厚度为dz,由于xy是剪应力对,即为xy和yx,将其分解为两组情况分别计算变形能,如图3.10所示。
由于xy与xy的作用,在微体上产生的应变能力
(3.42)
另外的剪应力和剪应变对(yz与yz,zx与zx)所产生的应变能与上面的计算公式类似。
3.整体应变能
由叠加原理,将各个方向的正应力与正应变、剪应力与剪应变所产生的应变能相加,可得到整体应变能
若用指标形式来写变形体的应变能,则有
(3.45)
3.5.3
系统的势能
3.5.4
IIUW
(3.46)
3.6虚功方程
虚位移的概念已在理论力学和材料力学中讲过。
虚位移是指满足物体变形连续条件和几何约束
条件的任何可能的无限小位移,虚位移不改变物体上原有外力的作用。
物体上的外力在虚位移上所作的功称为虚功。
对于刚体,作用在其上的平衡力系在任意虚位移上的总虚功必等于零,这就是刚体的虚位移原理。
实际上,它是以功的形式表达的刚体平衡条件。
在结构有限元分析中,各种结构单元的单元刚度矩阵、载荷向节点的简化等几乎都是基于虚功方程推导出来的,因此,理解虚功方程的实质,对于今后理解、推导单元的刚度矩阵、载荷向节点的移置等很有帮助。
我们的研究对象为一个处于平衡状态的变形体,如图3.11所示。
该物体是在体积力分量Fvx、
Fvy、Fvz的作用下、在自由边界C1上所受表面上的分量为Fx、Fy、Fz的作用下、在约束边界C2的
作用下,处于平衡状态。
可以想象,在以上载荷作用下,物体肯定发生了变形,在物体内部肯定引起了真实的应力:
xyzxyyzzxT。
显然,物体就是在这样一种条件下,处于平
衡状态,每个微单元体上的力系也都是一个平衡力系。
图3.11
现在设想该变形体发生了任意的虚位移{f*}u*v*w*^,相应的虚应变
*******T
{}xyzxyyzzx,我们来计算相应的虚功。
我们可以从两个方面着手来计算虚功。
一个是从整体的角度,计算变形体上的外力在相应的虚
位移上的虚功;另一个是从微观的角度,计算每一个微单元体上的力在相应的虚位移上的虚功,然后积分求和,得到总的虚功,再根据从这两个角度计算得到的虚功相等这一条件来得到虚功方程。
整体的角度:
作用在微单元体上的平衡力系中有体积力和各侧面上的应力组成的力系,因此,
作用在所有微单元体上的力系的虚功之总和W总也相应地由两部分组成:
w侧面力
式中,体力的总虚功W体力vF^u*Fvyv*Fvzw*dV;微单元体各侧面力的总虚功W侧面力。
又
可分为两部分:
一部分是物体内部相邻单元体公共侧面上的侧面力的总虚功,另一部分是物体边界侧面上的侧面力的总虚功。
由于任意两个相邻微单元体在公共侧面上的力总是大小相等、方向相反,
因此,它们的总虚功为零。
在边界侧面,固定边界C2上的虚位移为零,所以相应的侧面力的虚功也
为零。
只是在有表面力作用的自由边界ci上的表面力虚功不为零,故有w侧面力FxuFyvFzwdA。
因此:
ci
W总V(FvxU*Fvyv*FvzW*)dVFxU*Fyv*FzW*dA(3.47)
VCi
微观的角度:
因为每个微单元体的虚位移可以分解刚体虚位移和变形虚位移两部分,所以W总也
相应地由两部分组成:
***
W总W刚体W变形
式中,平衡力系在刚体虚位移上的总虚功W刚体0,只有在变形虚位移上的总虚功W变形0。
由图3.12a可见,正应力y在微单元体y方向引起的力ydxdz,在y向虚变形位移ydy上所作
的虚变形功为yydxdydz;同理,在x和z方向还有x;dxdydz和z;dxdydz。
由图3.12b可见,
在微单元体两相对面上的剪力xydydz形成的力偶矩xydxdydz,在相应的虚角位移列上所作的虚功等
于xyxydxdydz;同理有yzyzdxdydz禾口zxzxdxdydz。
(a)(b)
图3.12
的y向虚变形位移;dy/2上所作的虚功,显然是高阶微量;同理,在x、z方向体力分量的虚功也
是高阶微量,均可略去不计。
注意到各应力分量引起的力仅在相应的虚应变分量所对应的虚位移上作虚功,而不在其他分量方向上作虚功。
于是,微单元体的虚变形功为:
**~r
zxzxdxdydz{}dV
物体的总虚功为:
w总W变形V{}T{}dV(3.48)
虚功相等:
比较式(3.47)和式(3.48),即得变形体的虚功方程:
(FvxUFvyVFvzW)dVFxUFyVFzWdA
VCq
(3.49)
*T
V{}{}dV
式(3.49)表明,处于静力平衡状态下的物体,外力在虚位移上的总虚功等于应力在相应虚应变上的总虚变形功。
在弹性力学中,证明了虚功方程(3.49)与平衡微分方程(3.32)及应力边界条件式(3.38)完全等价。
在有限元法中,通常用虚功方程来代替变形体的平衡条件。
如果物体受集中力作用,在i点有沿x、y、z轴的分量Fix、Fiy、Fiz,在j点有Fjx、Fjy、Fjz……,
则可用列阵{F}表示这些外力,即:
设各力作用点i、j……相应的虚位移分量为,也可用列阵{*}表示为:
*******t
{}{UiViWiUjVjWj}
则在此种情况下的虚功方程可表示成为:
*T*t
{F}V{}{}dV(3.50)
习题
3.1为突出所处理问题的实质,并使问题有得以简单化和抽象化,在弹性力学中,提出了五个基本假定,他们的具体分别是什么?
3.2请推导二维弹性问题的力平衡方程和变形的几何方程。
3.3如何求变形体的便性能?
3.4什么是虚位移?
如何理解处于平衡状态的弹性体?
3.5请从整体的角度和微元体的角度推导虚功方程。
 升级会员
升级会员 