plc实验指导书09.docx
《plc实验指导书09.docx》由会员分享,可在线阅读,更多相关《plc实验指导书09.docx(18页珍藏版)》请在冰豆网上搜索。
plc实验指导书09
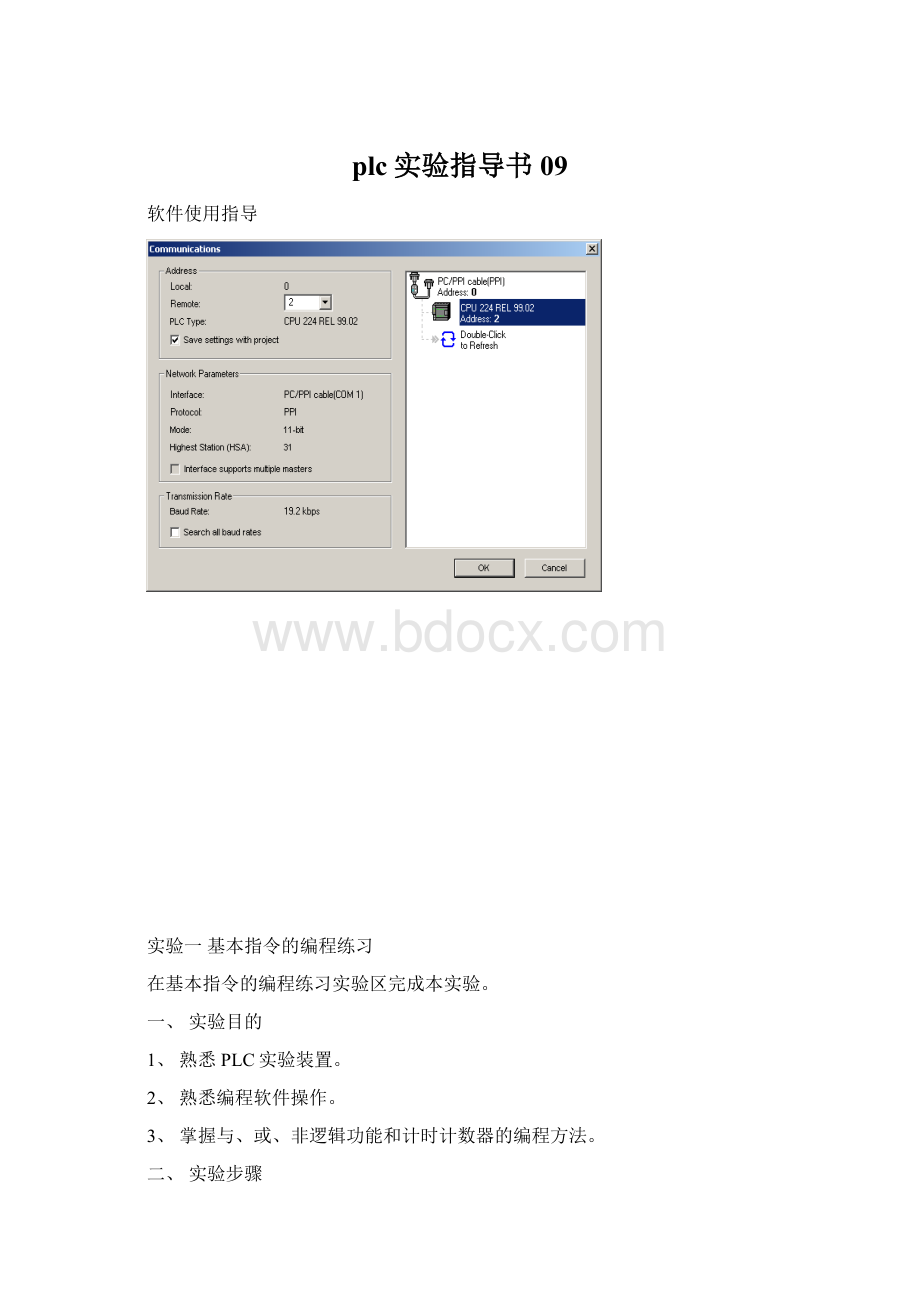
软件使用指导
实验一基本指令的编程练习
在基本指令的编程练习实验区完成本实验。
一、实验目的
1、熟悉PLC实验装置。
2、熟悉编程软件操作。
3、掌握与、或、非逻辑功能和计时计数器的编程方法。
二、实验步骤
1、通过防转叠插锁紧线与PLC的主机相应的输入输出插孔相接。
(I为输入点,Q为输出点。
钮子开关和清除按钮是输入设备,模拟开关量的输入;LED指示灯是输出负载,用以模拟输出负载的通与断。
)
2、在编程软件中编写基本指令练习程序,并下载程序到PLC
3、在PLC中运行程序,动作相应的输入设备,观察输出指示灯是否符合程序逻辑。
三、参考程序
1、与、或、非逻辑
步序
指令
操作数
说明
步序
指令
器件号
说明
0
LD
I0.0
输入
7
AN
I0.5
输入
1
A
I0.1
输入
8
=
Q0.3
或非门输出
2
=
Q0.0
与门输出
9
LDN
I0.6
输入
3
LD
I0.2
输入
10
ORI
I0.7
输入
4
O
I0.3
输入
11
=
Q0.4
与非门输出
5
=
Q0.1
或门输出
12
END
程序结束
6
LDN
I0.4
输入
2、定时器
步序
指令
操作数
说明
0
LD
I2.0
有输入,开始计时
1
TON
T37,50
2
LD
T37
延时5秒输出
3
=
Q0.0
4
LD
I2.1
有输入,计时器动作
5
TOF
T38,50
6
LD
T38
延时5秒断开输出
7
=
Q0.1
8
LD
I2.2
有输入,开始计时
9
TONR
T5,50
10
LD
T5
延时5秒输出并保持
11
=
Q0.2
12
LD
I2.3
有输入,复位T5
13
R
T5
12
END
程序结束
3、计数器
步序
指令
操作数
说明
0
LD
I0.0
计数输入
1
LD
I0.1
复位数入
2
CTU
C0,10
增计数10次
3
LD
C0
计数到,输出
4
=
Q0.0
5
LD
I0.2
计数输入
6
LD
I0.3
使能输入
7
CTD
C1,10
减计数10次
8
LD
C1
计数值为0时输出
9
=
Q0.1
四、思考题
1、写出程序的梯形图。
实验二十字路口交通灯控制
在十字路口交通灯控制实验区完成本实验。
一、实验目的
1、通过对工程实例的模拟,熟练地掌握PLC的编程和程序调试方法。
2、进一步熟悉PLC的I/O连接。
3、熟悉计时和比较指令的应用。
二、控制要求
信号灯受一个起动开关控制,当起动开关接通时,信号灯系统开始工作,且先南北红灯亮,东西绿灯亮。
当起动开关断开时,所有信号灯都熄灭。
南北红灯亮维持30秒,在南北红灯亮的同时东西绿灯也亮,并维持20秒。
到20秒时,东西绿灯闪烁,闪烁5秒后熄灭。
在东西绿灯熄灭时,东西黄灯亮,并维持5秒。
到5秒时,东西黄灯熄灭,东西红灯亮,同时,南北红灯熄灭,绿灯亮。
东西红灯亮维持30秒。
南北绿灯亮维持20秒,然后闪亮5秒后熄灭。
同时南北黄灯亮,维持5秒后熄灭,这时南北红灯亮,东西绿灯亮。
周而复始
三、输入/输出分配
(一)输入:
序号
名称
面板符号
程序符号
输入点
0
启动开关
SD
I0.0
I0.0
(二)输出:
序号
名称
面板符号
程序符号
输入点
0
南北向红灯
南北灯
红
S_NRed
Q0.0
1
南北向黄灯
黄
S_NYellow
Q0.1
2
南北向绿灯
绿
S_NGreen
Q0.2
3
南北向汽车乙
乙
S_NCar
Q0.3
4
东西向汽车甲
东西灯
甲
E_WCar
Q0.4
5
东西向绿灯
绿
E_WGreen
Q0.5
6
东西向黄灯
黄
E_WYellow
Q0.6
7
东西向红灯
红
E_WRed
Q0.7
四、实验步骤
(1)按照输入和输出两个配置表,将PLC的输入输出与相应面板符号的插孔用连接线连好;
(2)按照输入输出配置,参照参考程序,编写实验程序;
(3)下载编写程序到PLC,运行程序;
(4)模拟动作实验板上的按钮和开关,验证所编程序的逻辑。
五、实验参考程序
初始化
LDSM0.1
第一个扫描周期为1
RT50,1
复位计时器
RS_NRed,8
复位输出
关闭复位
LDStar
启动开关关闭
ED
RT5,1
复位计时器
RS_NRed,8
复位输出
启动开始计时
LDStar
启动
ANT50
计时器T50位为0
TONT50,+600
开始计时
东西绿灯
LDW<=T50,+200
计时在0秒到20秒之间
AW>T50,+0
SE_WGreen,1
东西绿灯亮
SS_NRed,1
南北向红灯亮
SE_WCar,1
东西向车开
东西向绿灯闪烁
LDW<=T50,+250
计时在20秒到25秒之间
AW>T50,+200
ANT38
TONT37,+5
T37开始计时
LDW<=T50,+250
计时在20秒到25秒之间
AW>T50,+200
AT37
计时器T37位为1
TONT38,+5
T38开始计时
LDT37
计时器T37位为1
RE_WGreen,1
灯灭
LDT38
计时器T38位为1
SE_WGreen,1
灯亮
东西向黄灯亮
LDW>T50,+250
计时在25秒到30秒之间
AW<=T50,+300
SE_WYellow,1
东西向黄灯亮
RE_WGreen,1
东西向绿灯灭
RE_WCar,1
东西向车停
南北绿灯
LDW>T50,+300
计时在30秒到50秒之间
AW<=T50,+500
SE_WRed,1
东西红灯亮
SS_NGreen,1
南北绿灯亮
SS_NCar,1
南北车开
RE_WYellow,1
东西黄灯灭
RS_NRed,1
南北红灯灭
南北向绿灯闪烁
LDW<=T50,+550
计时在50秒到55秒之间
AW>T50,+500
ANT40
计时器T40位为0
TONT39,+5
T39开始计时
LDW<=T50,+550
计时在50秒到55秒之间
AW>T50,+500
AT39
计时器T39位为1
TONT40,+5
T40开始计时
LDT39
计时器T39位为1
RS_NGreen,1
灯灭
LDT40
计时器T40位为1
SS_NGreen,1
灯亮
南北向黄灯亮
LDW>T50,+550
计时在55秒到60秒之间
AW<=T50,+600
SS_NYellow,1
南北向黄灯亮
RS_NGreen,1
南北向绿灯灭
RS_NCar,1
南北向车停
一个周期结束
LDT50
计时到60秒
RS_NRed,8
输出复位,开始下一周期
六、实验思考
1、画出参考程序的时序图并写出程序梯形图。
实验三液体混合装置控制的模拟
在液体混合装置控制的模拟实验区完成本实验。
一、实验目的
(1)对工程实例的模拟,熟练地掌握PLC的编程和程序调试方法。
(2)进一步熟悉PLC的I/O连接。
(3)熟悉液体混合装置的控制方式及其编程方法。
二、控制要求
本装置为两种液体混合装置,SL1、SL2、SL3为液面传感器,液体A、B阀门与混合液阀门由电磁阀YV1、YV2、YV3控制,M为搅匀电机,控制要求如下:
初始状态:
装置投入运行时,液体A、B阀门关闭,混合液阀门打开20秒将容器放空后关闭。
起动操作:
按下起动按钮SB1,装置就开始按下面规律操作:
液体A阀门打开,液体A流入容器。
当液面到达SL2时,SL2接通,关闭液体A阀门,打开液体B阀门。
液面到达SL1时,关闭液体B阀门,搅匀电机开始搅匀。
搅匀电机工作1分钟后停止搅动,混合液体阀门打开,开始放出混合液体。
当液面下降到SL3时,SL3由接通变为断开,再过20秒后,容器放空,混合液阀门关闭,开始下一周期。
停止操作:
按下停止按钮SB2后,在当前的混合液操作处理完毕后,停在初始状态,当有下一启动输入时,又开始工作。
三、输入/输出分配
(一)输入:
序号
名称
面板符号
程序符号
输入点
0
启动按钮
SB1
Star
I0.0
1
停止按钮
SB2
Stopped
I0.1
2
液位传感器1
SL1
SL1
I0.2
3
液位传感器2
SL2
SL2
I0.3
4
液位传感器3
SL3
SL3
I0.4
(二)输出:
序号
名称
面板符号
程序符号
输入点
0
液体A电磁阀
YV1
YV1
Q0.0
1
液体B电磁阀
YV2
YV2
Q0.1
2
排液电磁阀
YV3
YV3
Q0.2
3
搅拌电机
YKM
M
Q0.3
四、实验步骤
(1)按照输入和输出两个配置表,将PLC的输入输出与相应面板符号的插孔用连接线连好;
(2)按照输入输出配置,参照参考程序,编写实验程序;
(3)下载编写程序到PLC,运行程序;
(4)模拟动作实验板上的按钮和开关,验证所编程序的逻辑。
五、实验参考程序
初始化
LDSM0.1
第一个扫描周期为1
SM0.0,1
M0.0置1,即初始化位
RS0.0,8
SB0清零
LDM0.0
M0.0为1
TONT37,+100
T37开始计时
LDM0.0
M0.0为1
ANT37
计时未到10秒
=YV3
开排液阀
LDT37
计时到10秒
RM0.0,2
复位初始化位
启动
LDStar
有启动输入
ANM0.0
无初始化位,即初始化时启动无效
ANM0.1
无停止位,即有停止位时启动无效
AB=SB0,0
无活动步,即运行时启动无效
SS0.1,1
置第一步
进液体A步
LSCRS0.1
进液体A步开始
LDSM0.0
始终为1
SYV1,1
打开液体A电磁阀
LDSL2
到达液位2
RYV1,1
关闭液体A电磁阀
SCRTS0.2
置第二步
SCRE
进液体A步结束
进液体B步
LSCRS0.2
进液体B步开始
LDSM0.0
始终为1
SYV2,1
打开液体B电磁阀
LDSL1
到达液位1
RYV2,1
关闭液体B电磁阀
SCRTS0.3
置第三步
SCRE
进液体B步结束
搅拌步
LSCRS0.3
开始搅拌步
LDSM0.0
始终为1
TONT38,+100
T38开始计时
LDNT38
计时未到
SM,1
开搅拌电机
LDT38
搅拌时间到
RM,1
关搅拌电机
SCRTS0.4
置第四步
SCRE
搅拌步结束
排液步
LSCRS0.4
排液步开始
LDSM0.0
始终为1
SYV3,1
打开排液电磁阀
LDNSL1
低于液位1
ANSL2
低于液位2
ANSL3
低于液位3
TONT39,+100
T39开始计时
LDT39
计时10秒到
RYV3,1
关闭排液电磁阀
SCRTS0.5
置第五步
SCRE
排液步结束
停止步
LSCRS0.5
开始停止步
LDNM0.1
无停止位
SCRTS0.1
循环,开始第一步
LDM0.1
有停止位
RS0.0,8
停止所有步
RM0.1,1
复位停止位
SCRE
停止步结束
停止输入
LDStopped
有停止输入
AB<>0,SB0
程序不在停止状态
SM0.1,1
置停止位
六、实验思考
(1)画出参考程序流程图。
实验四机械手动作的模拟
在机械手动作的模拟实验区完成本实验。
一、实验目的
(1)过对工程实例的模拟,熟练地掌握PLC的编程和程序调试方法。
(2)进一步熟悉PLC的I/O连接。
(3)熟悉机械手的动作方式及其编程方法。
二、控制要求
实验模拟一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。
当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。
另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。
设备装有上、下限位和左、右限位开关,它的工作过程如图所示,有八个动作,即为:
原位下降夹紧上升右移
左移上升放松下降
三、输入/输出分配
(一)输入:
序号
名称
面板符号
程序符号
输入点
0
启动
SB1
Star
I0.0
1
下限位
SQ1
Down_limit
I0.1
2
上限位
SQ2
Up_limit
I0.2
3
右限位
SQ3
Right_limit
I0.3
4
左限位
SQ4
Left_limit
I0.4
5
停止
SB2
Stopped
I0.5
(二)输出:
序号
名称
面板符号
程序符号
输入点
0
下降
QV1
Down_move
Q0.0
1
夹紧
QV2
Clamp
Q0.1
2
上升
QV3
Up_move
Q0.2
3
右移
QV4
Right_move
Q0.3
4
左移
QV5
Left_move
Q0.4
5
原位
HL
Origin
Q0.5
四、实验步骤
(1)按照输入和输出两个配置表,将PLC的输入输出与相应面板符号的插孔用连接线连好;
(2)按照输入输出配置,参照参考程序,编写实验程序;
(3)下载编写程序到PLC,运行程序;
(4)模拟动作实验板上的按钮和开关,验证所编程序的逻辑。
五、实验参考程序
初始化
LDSM0.1
第一个扫描周期
MOVB0,SB0
清空SB0
原位
LDUp_limit
有上限位
ALeft_limit
同时有左限位
AB=0,SB0
同时没有其它动作步
=Origin
机械手在原位
启动
LDOrigin
机械手在原位
AStar
有启动
SS0.0,1
置第一步
停止
LDStopped
有停止
RS0.0,8
清所有动作步
RQ0.0,8
输出清零
左下降步
LSCRS0.0
第一步开始
LDSM0.0
始终为1
SDown_move,1
下降
LDDown_limit
有下
RDown_move,1
停止下降
LDDown_limit
有下限位
ANUp_limit
同时无上限位
SCRTS0.1
置第二步
SCRE
第一步结束
夹紧步
LSCRS0.1
第二步开始
LDSM0.0
TONT37,+20
延时2秒,模拟夹紧过程
LDT37
SClamp,1
SCRTS0.2
置第三步
SCRE
第二步结束
左上升步
LSCRS0.2
第三步开始
LDSM0.0
始终为1
SUp_move,1
上升
LDUp_limit
有上限位
RUp_move,1
停止上升
LDUp_limit
有上限位
ANDown_limit
同时无下限位
SCRTS0.3
置第四步
SCRE
第三步结束
右移步
LSCRS0.3
第四步开始
LDSM0.0
始终为1
SRight_move,1
右移
LDRight_limit
有右限位
RRight_move,1
停止右移
LDRight_limit
有右限位
ANLeft_limit
同时无左限位
SCRTS0.4
置第五步
SCRE
第四步结束
右下降步
LSCRS0.4
第五步开始
LDSM0.0
始终为1
SDown_move,1
下降
LDDown_limit
有下限位
RDown_move,1
停止下降
LDDown_limit
有下限位
ANUp_limit
同时无上限位
SCRTS0.5
置第六步
SCRE
第五步结束
放松步
LSCRS0.5
第六步开始
LDSM0.0
始终为1
TONT38,+20
延时2秒,模拟放松过程
LDT38
RClamp,1
SCRTS0.6
置第七步
SCRE
第六步结束
右上升步
LSCRS0.6
第七步开始
LDSM0.0
始终为1
SUp_move,1
上升
LDUp_limit
有上限位
RUp_move,1
停止上升
LDUp_limit
有上限位
ANDown_limit
同时无下限位
SCRTS0.7
置第八步
SCRE
第七步结束
左移步
LSCRS0.7
第八步开始
LDSM0.0
始终为1
SLeft_move,1
LDLeft_limit
有左限位
RLeft_move,1
停止左移
LDLeft_limit
有左限位
ANRight_limit
同时无右限位
RS0.7,1
复位第八步
SCRE
第八步结束
六、实验思考
(1)参考程序中用步进指令完成控制,画出步进流程图。
 升级会员
升级会员 