模糊控制在工程中的应用.docx
《模糊控制在工程中的应用.docx》由会员分享,可在线阅读,更多相关《模糊控制在工程中的应用.docx(13页珍藏版)》请在冰豆网上搜索。
模糊控制在工程中的应用
第8章模糊控制在工程中的应用
8.1倒立摆系统的T-S模型模糊控制
模糊控制在工业过程控制、机器人控制、运载工具控制及家电产品等领域有着广泛的应用,本章重点介绍几个例子。
本节课介绍基于T-S模糊模型的倒立摆控制。
8.1.1倒立摆系统概述
倒立摆系统是一个典型的非线性、强耦合、多变量和不稳定的高阶系统,许多抽象的控制理论概念都可以通过倒立摆实验直观的表现出来,是控制理论教学的理想实验设备和进行控制理论研究的典型实验平台,也是新成果、新方法的验证平台,开发平台,一直受到教学和科研人员的广泛关注。
因此,从其肇始之日至今的半个世纪的发展历程中,先后出现了形式各异的倒立摆,大致可以分为以下五大类:
直线倒立摆、平面倒立摆、斜轨道和圆轨道倒立摆以及并行倒立摆。
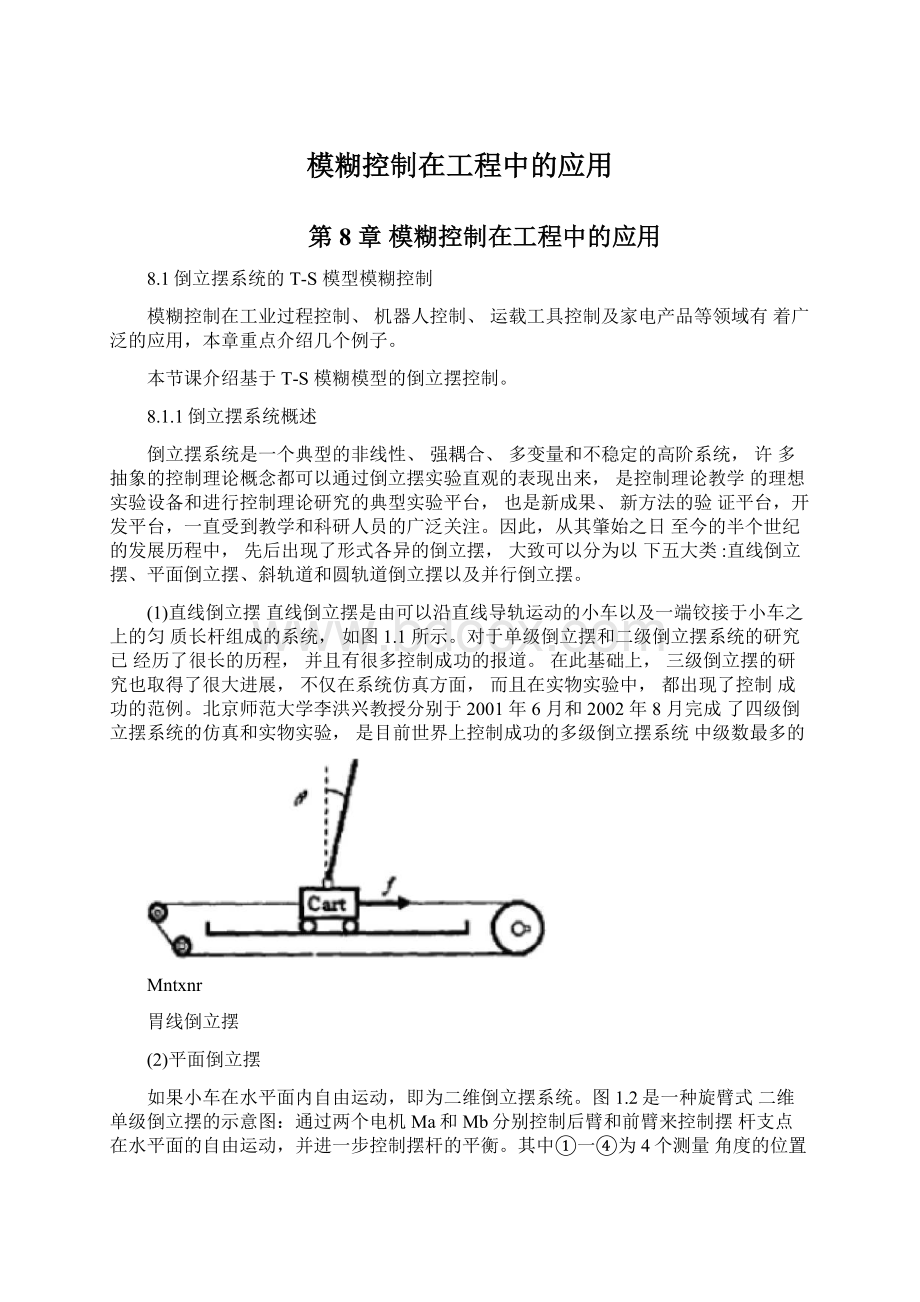
(1)直线倒立摆直线倒立摆是由可以沿直线导轨运动的小车以及一端铰接于小车之上的匀质长杆组成的系统,如图1.1所示。
对于单级倒立摆和二级倒立摆系统的研究已经历了很长的历程,并且有很多控制成功的报道。
在此基础上,三级倒立摆的研究也取得了很大进展,不仅在系统仿真方面,而且在实物实验中,都出现了控制成功的范例。
北京师范大学李洪兴教授分别于2001年6月和2002年8月完成了四级倒立摆系统的仿真和实物实验,是目前世界上控制成功的多级倒立摆系统中级数最多的
Mntxnr
胃线倒立摆
(2)平面倒立摆
如果小车在水平面内自由运动,即为二维倒立摆系统。
图1.2是一种旋臂式二维单级倒立摆的示意图:
通过两个电机Ma和Mb分别控制后臂和前臂来控制摆杆支点在水平面的自由运动,并进一步控制摆杆的平衡。
其中①一④为4个测量角度的位置传感器。
还有一种小车式二维倒立摆:
使用两个电机分别控制X轴和丫轴的运动,使得摆杆支点在水平面内自由运动,并进一步控制摆杆的平衡。
(3)斜轨道和圆轨道倒立摆
如果小车运动轨迹不是水平的直线,而是在倾斜的轨道上或圆形的轨道上运动,即为斜轨道或圆轨道的倒立摆系统。
其中因斜轨道型二级倒立摆系统与实际的控制问题模型相近,对其进行的研究也比较广泛。
斜轨道二级倒立摆如图1.3
所示,其轨道与水平方向成a的夹角。
图1.4为圆轨道单级倒立摆的示意图。
电机带动旋臂旋转,将摆杆的支点限制于以旋臂长度为半径的圆形轨道上,并控制倒立摆的两级摆杆平衡
斜轨道倒立擢
(4)并行倒立摆
对一些其他类型的倒立摆系统,也有人对其进行了研究。
如图1.5所示的并
行倒立摆系统。
所谓并行倒立摆系统,就是在同一个小车上安装两根互相独立的
单级摆杆,通过驱动小车来实现同时保持两根摆杆平衡的控制目标。
(5)旋转式倒立摆
旋转式倒立摆系统是不通过小车,直接利用电机转动进行控制的倒立摆系统。
图1.6是电机带动旋臂控制摆杆角度的倒立摆。
旋转倒直摆
8.1.2T-S模糊模型
模糊模型在形式上表现为一系列“IF—THEN―”的模糊规则的组合。
按照模糊规则后件不同的结构,我们可以将模糊模型分为三种,即Mamdani模糊模型、模糊关系模型和T-S模糊模型。
其中T-S模糊模型得到了众多学者的广泛关注,也是本文研究的重点。
Takagi和Sugeno于1985年提出了著名的T-S模糊模型,旨在开发从给定的输入-输出数据集产生模糊规则的系统化方法。
在T-S模糊模型中,规则后件是模型输入的函数:
R:
IfxisA
theny=fj(x),i=1,2,...,K
其中,x・Rm是输入(前件)变量;yR是输出(后件)变量;R表示第i条规则;K是规则库中的规则数;A是第i条规则的前件模糊集合,通过隶属函数来定义:
\(x):
Rm>[0,1]
其前件命题“XisA”通常表示成对于x单独成分定义的不变模糊集合简单命题的逻辑组合,通常为下面的组合形式:
Ri:
Ifx1isA|iandxisA;and…andXmis从,
Then%=f(x「x;,Xm);i=1,2,,K(8-1)
其中A[为模糊子集,隶属函数可以取三角形、梯形或者高斯型;f(X1,X;,…Xm)
是后件的精确函数,通常是输入变量Xj的多项式,也可以是任意函数。
当
f(X1,X;,Xm)为一阶多项式且带有常数项,即:
Yi=aTxbi(8-2)
其中,ai是参数变量,bi是标量补偿。
我们称这种模糊模型为仿射T-S模糊模型。
当bi=0,i=1,2/,K时,结论函数成为一种特殊形式,这时模型称为齐次T-S模型(或线性T-S模型):
IfxisAithen比=aTx,i=1,2,...,K
这种模型与仿射T-S模型相比,逼近非线性系统能力是有限的。
当a:
=0,i=1,2,…,K时,模型结论部分是一常数,所得到的模型称为零阶T-S模糊模型,也称为单点T-S模糊模型:
IfxisA
then%=b,i=1,2,...,K
这个模型也可以看成是语言模糊模型结论模糊集简化成单一值的特殊形式。
一般意义上的T-S模糊模型就是指仿射T-S模糊模型。
由于T-S模糊模型的后件为线性函数的形式,因此避免了繁琐的去模糊化
过程,系统的输出可以表示为:
W1Zt=卩必亠q』亠》
Z?
二qx-q2yD
加权平均
zWtZ^W2Z2
=3也
图8-1T-S模糊模型推理过程
图8-1为一阶T-S模糊模型的模糊推理过程。
由于每条规则都有一个精确输出,通过加权平均可以得到整体输出,从而避免Mamdani模型所需耗时的去模糊过程。
有时,一个简单的T-S模糊模型可以产生复杂的行为,下面是一个两输入
系统的例子
例2两输入单输出T-S模糊模型
如果X小,andY小,则z=-x+y+1;
如果X小,andY大,贝Uz=-y+3;
如果X大,andY小,则z=-x+3;
如果X大,andY大,贝Uz=x+y+2;
图8-2(a)给出了输入X和丫的隶属函数,图8-2(b)是所产生的输入一输出曲面。
曲面是复杂的,但仍然可以看出,曲面由几个平面构成,每个平面由一条模糊规则的输出方程来描述。
L
E
■
T
-
小
大
r
r
-3
-1
0
X
1
3
5
*•
■
1
11
小
大
-
1
0.5
0
-5
1
0.5
-3
3
5
rp-?
Bm3amrD
njfnrmRp3rae
图8-2例2中T-S模糊模型:
(a)隶属函数;(b)输入一输出曲面
如果T-S模糊系统的输出作为它自身的一个输入,则得到所谓的动态T-S
模糊系统。
具体地讲,一个动态T-S模糊系统采用的模糊规则,最常用的形式
为非线性自回归NARX模型。
在系统输入输出变量的阶次己知时,可将式⑴转述为
Ri:
Ify(k)isA;andy(k「1)isA;and…andy(k「m1)is您,andu(k)isB1andu(k「1)isB2and…andu(k-n1)isB;
mn
(8-6)
Thenyi(k1)a;y(k-p1)亠二b;u(k-q1)C;
pdq=1
模糊系统的输出为各子系统输出的加权平均,即
K
'wiyi(k1)
y(k1)=—k.(8-7)
Zwi
i二
其中模糊化采用单点模糊化,清晰化采用加权平均法。
W,是第i条规则的适应度,
运算采用求积法,即
mn
wiA;[y(k—p1)][【B;[u(k—q1)].(8-8)
pdqd
8.1.3单级倒立摆系统的数学模型
我们实验中采用的是固高科技有限公司生产的L1IP型直线单级倒立摆。
单级倒立摆的结构如图3所示。
其中M代表金属小车,m代表摆杆。
摆杆与小车自由连接。
小车由电机通过皮带驱动并沿着直线轨道运动。
控制目的是通过电机驱动小车,使摆杆动态平衡在倒立状态,这一过程即平衡控制;在此前提下,将小车控制到指定位置,即位置控制。
图中,
r:
小车的位移,单位(m);
9:
摆杆与垂直位置方向夹角,单位(rad);
M:
小车的质量,单位(kg);
m:
摆杆的质量,单位(kg);
l:
摆杆的中心到转轴的长度,单位(m);
J:
摆杆对重心的转动惯量,单位(kgm2);
u:
电机对小车施加的作用力,单位(N);
F:
小车所受的等效摩擦力,单位(N);
卩:
小车所受的等效摩擦系数,单位(kg/s);
f:
摆杆所受的摩擦阻力矩系数,单位(kgm2/s);
规定图示中r的方向为位移的正方向,顺时针方向为摆角的正方向。
则该单级倒
立摆动力学非线性方程组为
i广“mO
mlrcos日+(ml+J)T=mglsin^—fB
」..-・2.(&9)
(M+m)r+mlBcos^=u+ml日sinT—»r
当选取的状态变量为x^r;X2-v;X3二r;X4-v,丫二[rj]T为输出向
量。
(8-9)式可化为以下一阶非线性方程组,
Xi=3
X2=沧
222222
得到倒立摆系统的线性状态方程:
-mlfX4cosx2—mlgsinx2cosx2—(J+ml)»x3+(J+ml)mlx4sinx2+(J+ml)u
(8-12)
其中,相应矩阵如下所示:
0
0
0
1
;B=
0
0
t32
t33
t34
b3
0
t42
t43
t44_
1I
b4一
A=
0
2t2
01
;C」0
|t_01
222
a=(Mm)(Jml)-ml;
222
/a;
t32二一m丨g/a;t33二—(Jml)A/a;t34=—mlft42=(Mm)mgl/a;t43二"ml/a;t44--(Mm)f/a;
2
b3=(Jml)」/a;b4二-ml/a。
本论文中所用倒立摆的实际参数为M=1.096kg,m=0.109kg,卩二
0.100kg/s,l=0.250m,J=0.0034kgm2,f=0.00218kgm2/s。
8.1.4倒立摆系统的T-S模糊控制器设计
T-S模糊控制器的设计包括控制器的结构设计和参数设计。
控制器的结构设计包括:
1)控制器的输入变量和输出变量;
2)模糊规则的数目;
3)前件语言变量的隶属函数的类型;
控制器的参数包括:
1)前件参数;
2)后件参数。
1.输入变量和输出变量的确定
我们使用T-S模糊控制器控制实际倒立摆系统
T-S模糊控制器与倒立摆组成的闭环控制系统如图8-4所示。
倒立摆系统有
4个状态变量:
小车位移x,摆杆角度二,小车速度x,摆杆角速度二,即图8-4
中x,angle,xdot,angledot,这些状态变量为T-S模糊控制器的输入。
输出变量
为小车所受的控制力•
T-SLogic
Controller
图8-4倒立摆的闭环控制系统
2.模糊规则数目的确定
在T-S模糊控制器中,将这4个状态变量的语言变量分别采用“正”、“负”个语言值,从而组合出24=16条模糊控制规则。
每条规则采用T-S型模糊规则。
3.前件隶属函数形状的的确定
我们可以采用高斯型函数作为前件隶属函数的类型。
于是,T-S模糊控制器的结构已完全确定。
4.T-S模糊控制器参数的确定
若前件语言变量的隶属度函数采用高斯型函数,可用中心和方差2个参数对
其描述,则每个语言变量对应4个参数,模糊控制器总共有4个语言变量,因此隶属函数对应16个前件参数。
再加上每一个规则后件有5个参数,对应16
条规则,共有16x5=80个后件参数,需要优化设计的控制器参数总共有个96。
可以使用遗传算法,神经网络的算法优化这些参数。
参数优化的过程见图8-5.
图8-5模糊控制器参数的优化过程
5.生成T-S模糊推理系统
通过上述方法生成16条规则的T-S模糊模型。
图8-6表示生成的模糊控制
器的输入变量:
摆杆角度,摆杆角速度,小车位移,小车速度的隶属函数
图8-6T-S模糊模型输入变量的隶属函数
16条规则的T-S模糊模型为:
1.If[x=in1mf1]and[xdot=in2mf1]and[angle=in3mf1]and[angledot=in4mf1],
theny1=InputVector*[-25.28-21.0769.5511.810.3678]T
2.If[x=in1mf1]and[xdot=in2mf1]and[angle=in3mf1]and[angledot=in4mf2],
theny2=InputVector*[-38.26-20.696911.21-2.511]T
3.If[x=in1mf1]and[xdot=in2mf1]and[angle=in3mf2]and[angledot=in4mf1],
theny3=InputVector*[-1.7-22.3754.6611.774.813]T
15.If[x=in1mf2]and[xdot=in2mf2]and[angle=in3mf2]and[angledot=in4mf1],
theny15=InputVector*[-2.86-12.2991.7110.87-10.81]T
16.If[x=in1mf2]and[xdot=in2mf2]and[angle=in3mf2]and[angledot=in4mf2],
theny16=InputVector*[-15-15.5797.4212.03-10.24]T
其中InputVector=[x,xdot,angle,angledot]=[x,x^^]
8.1.5倒立摆系统的仿真控制
 升级会员
升级会员 