自主泊车系统复杂交通环境通行能力试验基本冲突场景.docx
《自主泊车系统复杂交通环境通行能力试验基本冲突场景.docx》由会员分享,可在线阅读,更多相关《自主泊车系统复杂交通环境通行能力试验基本冲突场景.docx(26页珍藏版)》请在冰豆网上搜索。
自主泊车系统复杂交通环境通行能力试验基本冲突场景
附 录 A复杂交通环境通行能力试验基本冲突场景
A.1 基本冲突场景分类
根据冲突发生时,冲突对象的不同,冲突时冲突双方运动方向的不同,可将基本冲突场景分为静止车辆冲突场景,同向行驶车辆冲突场景,相向行驶车辆冲突场景,交叉行驶车辆冲突场景,弱势交通参与者冲突场景。
A.2 本车与静止车辆冲突场景
车辆行驶前方道路出现影响本车按既定行驶路径行驶的静止车辆。
该类基本场景包含两类冲突场景:
目标车道前车静止(表B.1)和前方路测异常停车(表B.2)。
表A.1 目标车道前方静止车辆
名称
目标车道前方静止车辆
场景描述
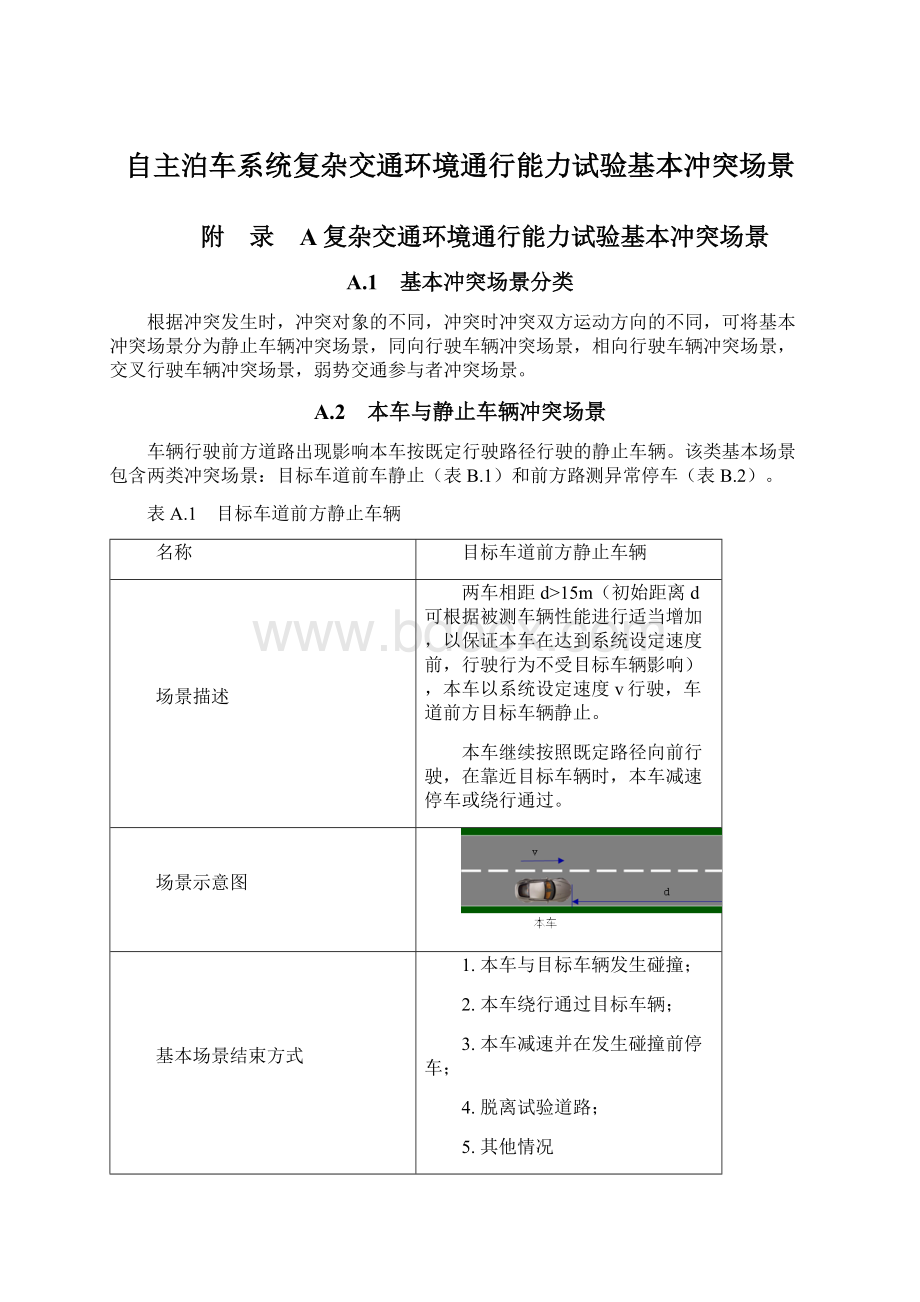
两车相距d>15m(初始距离d可根据被测车辆性能进行适当增加,以保证本车在达到系统设定速度前,行驶行为不受目标车辆影响),本车以系统设定速度v行驶,车道前方目标车辆静止。
本车继续按照既定路径向前行驶,在靠近目标车辆时,本车减速停车或绕行通过。
场景示意图
基本场景结束方式
1.本车与目标车辆发生碰撞;
2.本车绕行通过目标车辆;
3.本车减速并在发生碰撞前停车;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.绕行通过目标车辆,并回到目标车道,继续行驶;
2.减速并在发生碰撞之前停车等待,等待超出系统设定时间后进入失效模式;
以上两种情况中,本车均不应出现脱离试验道路的情况,本车最高行驶车速不超过15km/h。
表A.2 前方路侧异常停车车辆
名称
前方路侧异常停车车辆
场景描述
两车相距d>15m(初始距离d可根据被测车辆性能进行适当增加,以保证本车在达到系统设定速度前,行驶行为不受目标车辆影响),本车以系统设定速度v行驶,前方路侧目标车辆未正常停放在车位内部,车头突出至道路内部l=1m。
本车继续按照既定路径向前行驶,在靠近目标车辆时,本车减速停车或绕行通过。
场景示意图
基本场景结束方式
1.本车与目标车辆发生碰撞;
2.本车绕行通过目标车辆;
3.本车减速并在发生碰撞前停车;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.绕行通过目标车辆,并回到目标车道,继续行驶;
2.减速并在发生碰撞之前停车等待,等待超出系统设定时间后进入失效模式;
以上两种情况中,本车均不应出现脱离试验道路的情况,本车最高行驶车速不超过15km/h。
A.3 本车与同向行驶车辆冲突场景
与本车行驶方向相同的两车冲突场景。
该类基本场景包含四类冲突场景:
车道前方低速行驶车辆(表B.3),前方目标车辆制动停车(表B.4),目标车辆从本车道前方切入(表B.5)和本车变道侧方同向来车(表B.6)。
表A.3 本车道前方低速行驶车辆
名称
本车道前方低速行驶车辆
场景描述
两车相距d>15m(初始距离d可根据被测车辆性能进行适当增加,以保证本车在达到系统设定速度前,行驶行为不受目标车辆影响),本车以系统设定速度v行驶,车道前方出现以较低车速同向行驶的车辆。
本车继续按照既定路径向前行驶,在靠近目标车辆时,本车减速并跟行或绕行超车通过。
场景示意图
基本场景结束方式
1.本车与目标车辆发生碰撞;
2.本车绕行超车通过目标车辆;
3.本车减速并在目标车辆后跟车行驶超过20m;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.绕行超车通过目标车辆,并切回目标车道,继续行驶;
2.本车减速并在目标车辆后跟车行驶超过20m;
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.4 前方目标车辆制动停车
名称
本车道前方目标车辆制动停车
场景描述
两车相距d>15m(初始距离d可根据被测车辆性能进行适当增加,以保证本车在达到系统设定速度前,行驶行为不受目标车辆影响),本车以系统设定速度v行驶,车道前方目标车辆以低于出现本车设定车速2km/h的速度u行驶。
1)本车采取绕行超车策略,目标车辆维持速度u匀速行驶;
2)本车采取跟车行驶策略,跟车行驶20m后,目标车辆以-4m/s2减速度制动停车。
场景示意图
基本场景结束方式
1.本车与目标车辆发生碰撞;
2.本车绕行超车通过目标车辆;
3.本车减速并在发生碰撞前停车;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.绕行通过目标车辆,并回到目标车道,继续行驶;
2.减速并在发生碰撞之前停车等待,等待超出系统设定时间后进入失效模式;
3.减速并在发生碰撞之前停车等待,目标车辆驶离后,本车自行启动并行驶。
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.5 目标车辆从本车道前方切入
名称
目标车辆从本车道前方切入
场景描述
本车以系统设定速度v行驶,目标车辆以低本车设定车速2km/h的速度行驶在本车旁边车道前方行驶,待本车和目标车辆相距5m时,目标车辆快速变道至本车车道,本车应减速以避免碰撞。
场景示意图
基本场景结束方式
1.与目标车辆发生碰撞;
2.绕行通过目标车辆,并回到目标车道,继续行驶;
3.本车减速至目标车辆车速左右保持一定车距跟车行驶20m;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.绕行通过目标车辆,并回到目标车道,继续行驶;
2.减速至目标车辆车速左右保持一定车距跟车行驶20m
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.6 本车绕行侧方同向来车
名称
本车绕行侧方同向来车
场景描述
初始时,本车距假人假人d>15m(初始距离d可根据被测车辆性能进行适当增加,以保证本车在达到系统设定速度前,行驶行为不受目标车辆影响),本车以系统设定速度v行驶,目标车辆在旁边车道以相同速度(v±0.5km/h)同向行驶,初始时控制目标车辆与本车的重叠率保持在75%以上。
试验中,本车应识别假人目标,并制动停车或等候绕行通过。
场景示意图
基本场景结束方式
1.本车与目标车辆或假人目标发生碰撞;
2.本车减速让行后,完成绕行;
3.本车制动停车等候;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.本车减速让行,待目标车辆通过后,绕行通过行人并回到目标车道行驶;
2.本车减速并在发生碰撞之前停车等待,等待超出系统设定时间后进入失效模式;
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
A.4 相向行驶车辆冲突场景
与本车相向行驶的两车潜在冲突场景。
该类基本场景包含四类冲突场景:
单车道会车场景(表B.7)和双车道会车场景(表B.8)。
表A.7 单车道会车场景
名称
单车道会车场景
场景描述
本车和目标车辆在单车道上同向行驶,本车系统设定速度v行驶,目标车辆u=5±1km/h行驶,相距d=10±1m时,目标车辆向右靠边行驶,并在两车相距d=5m前行驶至右侧1/2车道宽度内部。
本车应减速靠右侧行驶并通过。
场景示意图
基本场景结束方式
1.与目标车辆发生碰撞;
2.车辆靠右侧行驶,并通过目标车辆后,继续沿目标车道行驶;
3.本车减速并在两车发生碰撞前停车;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.车辆靠右侧行驶,并通过目标车辆后,继续沿目标车道行驶;
2.本车减速并在两车发生碰撞前停车,并进入失效模式;
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.8 双车道会车场景
名称
双车道会车场景
场景描述
本车和目标车辆在双向单车道上同向行驶,本车系统设定速度v行驶,目标车辆u=5±1km/h行驶,在两车相距距离d=5±1m时,本车无变道行为,目标车辆以-6m/s2的减速度减速制动完全停车。
场景示意图
基本场景结束方式
1.与目标车辆发生碰撞;
2.车辆靠左侧车道变道行驶,并通过目标车辆后,继续沿目标车道行驶;
3.本车减速并在两车发生碰撞前停车;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.车辆靠左侧行驶,并通过目标车辆后,继续沿目标车道行驶;
2.本车减速并在两车发生碰撞前停车,并进入失效模式;
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
A.5 交叉行驶车辆冲突场景
交叉行驶车辆冲突场景包含两大类型,交叉路口(十字路口或丁字路口等)行驶冲突场景和目标车辆泊车或驶离车位时与本车行驶冲突场景。
交叉路口行驶冲突场景
本车以系统设定速度行驶,在即将通过交叉路口(十字路口或丁字路口)时,控制目标车辆先于本车出现在潜在的冲突区域。
A.5.1.1 表B.9为交叉路口行驶冲突场景试验的基本过程。
表A.9 交叉路口行驶冲突场景试验
名称
交叉路口行驶冲突场景
场景描述
本车以系统设定速度行驶,在即将通过交叉路口(十字路口或丁字路口)时,距离交叉路口d1=10m时,控制目标车辆(在距离交叉路口d2=5m等候)先于本车出现在潜在的冲突区域。
基本场景结束方式
1.与目标车辆发生碰撞;
2.车辆制动减速(或短时停车)主动让行目标车辆,待目标车辆通过后,按既定路径通过交叉路口;
3.本车减速制动并在碰撞前停车,进入失效模式;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.车辆制动减速(或短时停车)主动让行目标车辆,待目标车辆通过后,按既定路径通过交叉路口;
2.本车减速制动并在碰撞前停车,进入失效模式;
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
A.5.1.2 表B.10为常见交叉路口行驶冲突场景类型。
表A.10 交叉路口行驶冲突场景类型
场景
场景名称
场景示意图
本车行为
目标车行为
初始位置
1
直行
直行
目标车辆位于本车行驶方向右侧交叉路上
2
直行
左转
目标车辆位于本车行驶方向右侧交叉路上
3
直行
右转
目标车辆位于本车行驶方向右侧交叉路上
4
直行
直行
目标车辆位于本车行驶方向左侧交叉路上
5
直行
左转
目标车辆位于本车行驶方向左侧交叉路上
6
直行
左转
目标车辆位于十字路口对面相向行驶
7
右转
左转
目标车辆位于十字路口对面相向行驶
8
右转
直行
目标车辆位于本车行驶方向左侧交叉路上
9
左转
直行
目标车辆位于本车行驶方向左侧交叉路上
10
左转
左转
目标车辆位于本车行驶方向左侧交叉路上
11
左转
直行
目标车辆位于十字路口对面相向行驶
12
左转
左转
目标车辆位于十字路口对面相向行驶
13
左转
直行
目标车辆位于本车行驶方向右侧交叉路上
14
左转
左转
目标车辆位于本车行驶方向右侧交叉路上
目标车辆泊车和驶离车位冲突场景
本车在停车场内部行驶时,前方目标车辆泊车入位或驶离车位,与本车行驶路径产生潜在冲突。
该类基本场景包含两类冲突场景:
目标车辆泊车入位(表B.11)和目标车辆驶离车位(表B.12)。
表A.11 目标车辆泊车入位
名称
目标车辆泊车入位
场景描述
本车直道跟车行驶,两车相距距离d等于本车系统设定最小跟车距离时前方车辆制动停车并开始泊车入位。
本车应识别出前方车辆动作,并制动停车进行等待,前方车辆泊入车位后,本车继续行驶,或本车绕行通过,继续行驶。
场景示意图
基本场景结束方式
1.与目标车辆发生碰撞;
2.本车制动停车进行等待,前方车辆泊入车位后,本车继续行驶;
3.本车绕行通过目标车辆,继续行驶;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.本车制动停车进行等待,前方车辆泊入车位后,本车继续行驶;
2.本车绕行通过目标车辆,继续行驶;
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.12 目标车辆驶离车位
名称
目标车辆驶离车位
场景描述
目标车辆在本车距离车位为5m时,开始驶离车位。
本车应识别出前方车辆动作,并进行制动停车进行等待,前方车辆离开车位后,本车继续行驶,或本车绕行通过继续行驶。
场景示意图
基本场景结束方式
1.与目标车辆发生碰撞;
2.本车制动停车进行等待,目标车辆驶离后,本车继续行驶;
3.本车绕行通过目标车辆,继续行驶;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.本车制动停车进行等待,目标车辆驶离车位后,本车继续行驶;
2.本车绕行通过目标车辆,继续行驶;
以上两种情况中,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
本车泊车和驶离车位冲突场景
本车泊车入位或驶离车位时,与停车场车道行驶目标车辆产生潜在冲突。
该类基本场景包含两类冲突场景:
本车泊车入位后方来车(表B.13)和本车驶离车位车道来车(表B.14)。
表A.13 本车泊车入位后方来车
名称
本车泊车入位后方来车
场景描述
车辆在搜索车位成功后,开始泊车入位时,目标车辆行驶至图示位置停车。
在泊车过程中,本车应识别出目标车辆,并进行制动停车,以避免碰撞。
场景示意图
基本场景结束方式
1.与目标车辆发生碰撞;
2.本车减速并在两车发生碰撞前停车;
3.脱离试验道路;
4.其他情况
通过基本场景测试
本车减速并在两车发生碰撞前停车,并进入失效模式,试验过程中本车不能出现脱离试验道路的情况,最高车速不超过5km/h。
表A.14 本车驶离车位车道来车
名称
本车驶离车位车道来车
场景描述
本车在激活唤车任务后,启动车辆开始驶离车位,控制目标车辆从距离车位5m的位置快速驶向目标车位,造成冲突。
本车应识别目标车辆,并控制本车制动减速停车至目标车辆离开后,继续驶离车位。
场景示意图
基本场景结束方式
1.与目标车辆发生碰撞;
2.本车减速并在两车发生碰撞前停车,目标车辆驶离后,本车开始驶离车位;
3.脱离试验道路;
4.其他情况
通过基本场景测试
本车减速并在两车发生碰撞前停车,目标车辆驶离后,本车开始驶离车位,试验过程中本车不应出现脱离试验道路的情况,最高车速不超过5km/h。
A.6 弱势交通参与者冲突场景
低速自动驾驶中弱势交通参与者冲突场景
本车在低速自动驾驶过程中弱势交通参与者出现在车道区域,造成冲突的场景。
根据行人所处的位置及行人的状态可分为6类,直行道路上静止行人(表B.15),直行道路行人横穿(表B.16),直行道路行人相向行走(表B.17),直行道路行人同向行走(表B.18),车辆转弯行驶行人静止(表B.19)和车辆转弯行驶行人横穿(表.20)
表A.15 直行道路上静止行人
名称
直行道路上静止行人
场景描述
直行道路上,本车以系统设定车速行驶,前方车道正中目标假人静止。
本车应识别出假人目标,并进行制动停车或绕行通过。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车;
3.车辆绕行通过假人后回到目标车道继续行驶;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.本车减速并在发生碰撞前停车,等待一段时间后进入失效模式;
2.车辆绕行通过假人后回到目标车道继续行驶;
以上两种情况,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.16 直行道路行人横穿
名称
直行道路行人横穿
场景描述
直行道路上,本车以系统设定车速行驶,在离车头距离为d=5m时,行人以目标速度5km/h横穿道路,根据本车设定速度,设定目标假人的初始位置y,以保证在本车维持设定速度行驶时,目标假人在碰撞发生时,与车辆车头发生碰撞;
本车应识别出假人目标,并进行减速或停车让行,目标假人通过后,继续行驶。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车,并在假人通过后继续行驶;
3.脱离试验道路;
4.其他情况
通过基本场景测试
本车减速并在发生碰撞前停车,并在假人通过后继续行驶。
试验过程中本车不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.17 直行道路行人相向行走
名称
直行道路行人迎面行走
场景描述
直行道路上,本车以系统设定车速行驶,前方车道正中目标假人以速度u=5km/h迎面靠近;
本车应识别出假人目标,并进行减速或停车避撞或主动绕行通过。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车;
3.本车变道通过假人目标,并继续行驶;
3.脱离试验道路;
4.其他情况
通过基本场景测试
1.本车减速并在发生碰撞前停车,等待一段时间后进入失效模式;
2.本车变道通过假人目标,并继续行驶;
以上两种情况,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.18 直行道路行人同向行走
名称
直行道路行人迎面行走
场景描述
直行道路上,本车以系统设定车速行驶,前方车道正中目标假人以速度u=3km/h向前行走;
本车应识别出假人目标,并进行减速或停车避撞或主动绕行通过。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车;
3.本车变道通过假人目标,并继续行驶;
3.脱离试验道路;
4.其他情况
通过基本场景测试
1.本车减速并在发生碰撞前停车,等待一段时间后进入失效模式;
2.本车变道通过假人目标,并继续行驶;
以上两种情况,本车均不应出现脱离试验道路的情况,最高车速不超过15km/h。
表A.19 车辆转弯行驶,行人静止
名称
车辆转弯行驶,行人静止
场景描述
交叉路口处,本车以系统设定车速行驶,目标假人静止在目标道路路口中间;
本车应识别出假人目标,并进行减速停车避撞,或绕行通过目标假人后继续行驶。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车;
3.本车绕行通过假人并进入目标车道继续行驶;
4.脱离试验道路;
5.其他情况
通过基本场景测试
1.本车减速并在发生碰撞前停车,等待一段时间后进入失效模式;
2.本车绕行通过假人并进入目标车道继续行驶;
以上两种情况,本车均不应出现脱离试验道路的情况,最高车速不超过5km/h。
表A.20 车辆转弯行驶,行人横穿
名称
车辆转弯行驶,行人横穿
场景描述
交叉路口处,本车以系统设定车速行驶,在转弯过程中,控制假人以速度为3km/h通过十字路口,假人的初始位置根据本车设定速度进行调整,以保证车辆维持设定速度行驶时,假人和车辆前部发生冲突;
本车应识别出假人目标,并进行减速停车避让,假人离开后继续行驶。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车让行,并在假人通过后继续行驶;
3.脱离试验道路;
4.其他情况
通过基本场景测试
本车减速并在发生碰撞前停车让行,等待假人目标通过后继续行驶。
试验过程中本车不应出现脱离试验道路的情况,最高车速不超过5km/h。
泊车和驶离车位过程中弱势交通参与者冲突场景
本车在泊车和驶离车位过程中弱势交通参与者从车道或车位出现,造成冲突的场景。
该类基本场景分为4类:
泊车入位后方冲突行人(表B.21),泊车入位车位窜出行人(表B.22),驶离车位前方静止行人(表B.23)和驶离车位车道来人(表B.24)。
表A.21 泊车入位后方冲突行人
名称
泊车入位后方冲突行人
场景描述
车辆在搜索车位成功后,开始泊车入位时,假人目标出现在图示位置。
在泊车过程中,本车能够识别出假人目标,并进行制动停车,以避免碰撞。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车;
3.脱离试验道路;
4.其他情况
通过基本场景测试
本车减速并在发生碰撞前停车,试验过程中本车不应出现脱离试验道路的情况,最高车速不超过5km/h。
表A.22 泊车入位车位窜出行人
名称
泊车入位车位窜出行人
场景描述
车辆在搜索车位成功后,开始泊车入位时,假人目标从目标车位走出。
在泊车过程中,本车能够识别出假人目标,并进行制动停车,以避免碰撞。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车;
3.脱离试验道路;
4.其他情况
通过基本场景测试
本车减速并在发生碰撞前停车,试验过程中本车不应出现脱离试验道路的情况,最高车速不超过5km/h。
表A.23 驶离车位前方静止行人
名称
驶离车位前方静止行人
场景描述
本车在激活唤车任务后,启动车辆开始驶离车位,假人目标位于车位前方图示位置处。
本车能够识别假人目标,并控制本车制动减速停车,以避免碰撞。
场景示意图
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速并在发生碰撞前停车或未激活唤车任务;
3.脱离试验道路;
4.其他情况
通过基本场景测试
本车减速并在发生碰撞前停车或未激活唤车任务,试验过程中本车不应出现脱离试验道路的情况,最高车速不超过5km/h。
表A.24 驶离车位车道来人
名称
驶离车位车道来人
场景描述
本车在激活唤车任务后,启动车辆开始驶离车位,假人目标从位于图示位置处出发以3km/h向车位方向移动。
本车应识别假人目标,并控制本车制动减速停车避让,并在假人目标通过后驶离车位。
场景示意图
gfxzf
基本场景结束方式
1.与假人目标发生碰撞;
2.本车减速停车避让,并在假人目标通过后驶离车位;
3.脱离试验道路;
4.其他情况
通过基本场景测试
本车减速停车避让,并在假人目标通过后驶离车位,试验过程中本车不应出现脱离试验道路的情况,最高车速不超过5km/h。
 升级会员
升级会员 