航模入门教材.docx
《航模入门教材.docx》由会员分享,可在线阅读,更多相关《航模入门教材.docx(20页珍藏版)》请在冰豆网上搜索。
航模入门教材
2015年2月18日
武科大航模协会
写在前面的话
繁话休絮,开门见山。
本文档所包含教程供新手使用。
本教程并非全是原创,只是由于网上东西太乱,所以笔者搜集并整理广大资料并融入个人经验编纂成此教程,本教程供且仅供本协会内部使用,鄙人不才,错误之处还望包涵。
第一章航空模型的一般知识
航空模型就是各种航空器模型的总称,它包括航空飞机和其他模型飞行器。
在国际航联制定的竞赛规则里明确规定“航空模型是一种重于空气的,有尺寸限制的,带有或不带有发动机的,不能载人的航空器”。
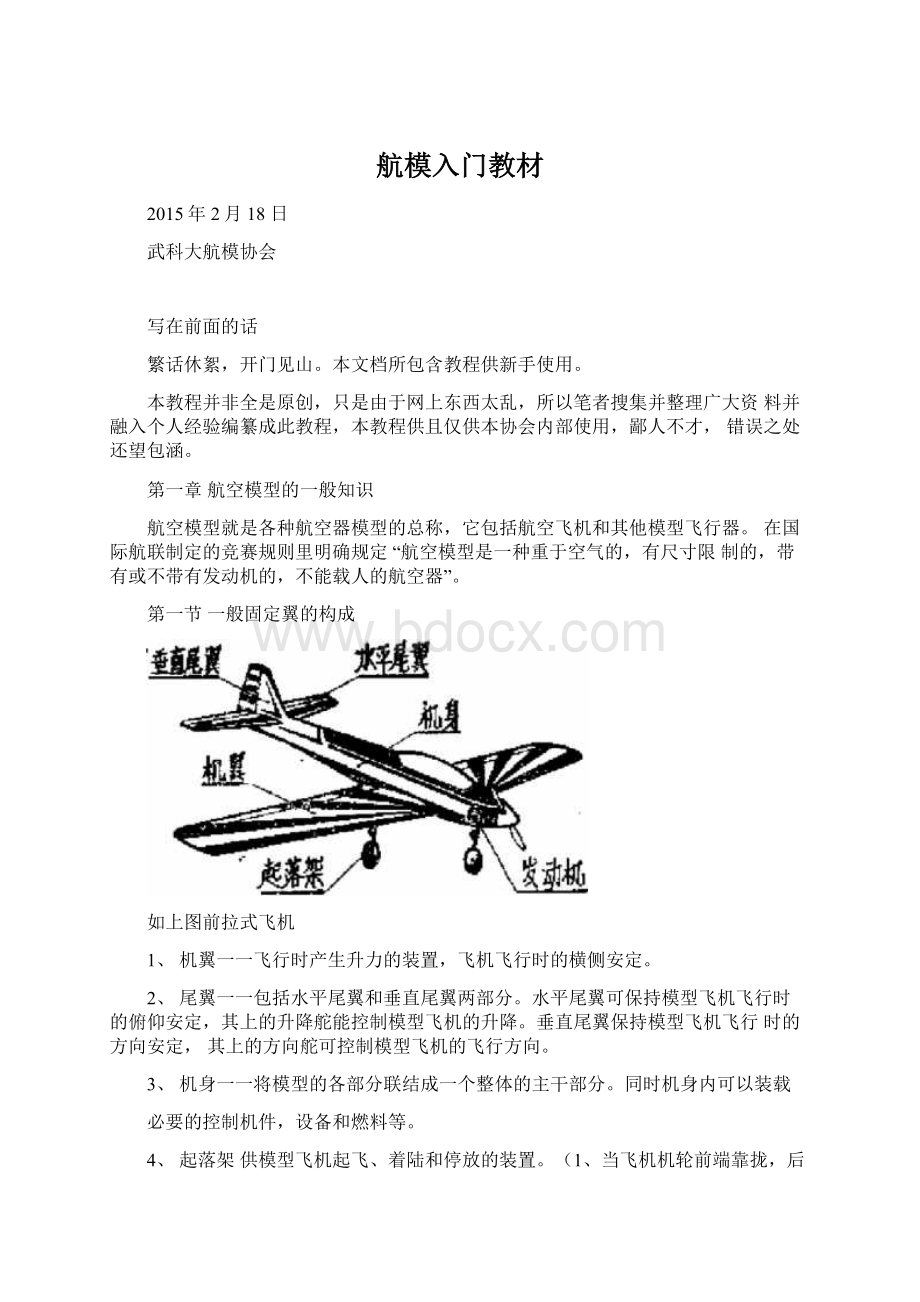
第一节一般固定翼的构成
如上图前拉式飞机
1、机翼一一飞行时产生升力的装置,飞机飞行时的横侧安定。
2、尾翼一一包括水平尾翼和垂直尾翼两部分。
水平尾翼可保持模型飞机飞行时的俯仰安定,其上的升降舵能控制模型飞机的升降。
垂直尾翼保持模型飞机飞行时的方向安定,其上的方向舵可控制模型飞机的飞行方向。
3、机身一一将模型的各部分联结成一个整体的主干部分。
同时机身内可以装载
必要的控制机件,设备和燃料等。
4、起落架供模型飞机起飞、着陆和停放的装置。
(1、当飞机机轮前端靠拢,后
端分开,发生扰动偏离方向时,能够自动抵抗偏转。
2、当飞机机轮前端分开,后端靠拢,
发生扰动偏离方向时,只会加剧方向偏转,最终导致飞机方向无法控制,在起飞高速滑行中
是飞机绕横轴上下俯仰偏转,达到升降的目的)
7、方向舵——垂直尾翼上可动的板子(方向舵的主要功能是提供飞机纵轴的转向力矩,
使飞机绕纵轴左右偏转,达到转弯到目的。
)
8、副翼——机翼上可动的板子(副翼的功能主要是产生机身轴向上的偏转力矩,让飞机绕机身纵轴滚转)
9、襟翼一一襟翼是作为飞机机翼上的一个升力辅助舵面而存在的,主要是通过偏转,为机翼提供持续的升力补偿,因只出现在较高级的仿真模型飞机中
第二节航模技术常用术语
1、翼展一一机翼(尾翼)左右翼尖间的直线距离。
2、机身全长模型飞机最前端到最末端的直线距离。
3、尾心臂——由重心到水平尾翼前缘四分之一弦长处的距离。
4、翼型——机翼或尾翼的横剖面形状。
5、前缘——翼型的最前端。
6后缘一一翼型的最后端。
7、翼弦——前后缘之间的连线。
8、展弦比一一翼展与平均翼弦长度的比值。
展弦比大说明机翼狭长
9、削尖比一一指梯形机翼翼尖翼弦长与翼根弦长的比值。
10、上反角——机翼前缘与模型飞机横轴之间的夹角。
11、后掠角一一机翼前缘与垂直于机身中心线的直线之间的夹角。
12、机翼安装角一一机翼翼弦与机身度量用的基准线的夹角。
13、机翼迎角一一翼弦与机翼迎面流来的气流的夹角。
14、总升力面积——是模型飞机处于水平飞行状态时。
机翼的总面积以及水平和倾斜安放的尾翼面积,在水平上的正投影面积之和。
15、重心——模型飞机各部分重力的合力作用点称为重心。
(每架飞机的重心位
置都不同,常规固定翼飞机的重心一般在机翼宽度(玄长)的30%位置左右(包
含副翼宽度),但是这个30%位置也并非一成不变的,具体机型要灵活掌握,应当调整至飞机水平抛出以后,呈略低头缓慢滑降为宜,直接栽头说明重心偏前,波状飞行说明重心偏后。
测试和查找重心位置的时候,可用2个手指分别在两侧机翼下表面相同位置托起,反复更改和寻找位置,当飞机正好处于水平平衡时,手指所托的位置即为前后重心位置)
第三节一般固定翼电子设备
1、遥控器(简称控)是发射机,现在一般通用频率2.4G(航模遥控器一般有FM频段以及2.4g频段。
FM频段遥控器天线很长,2.4g遥控器天线很短,两者之间很好辨识。
FM频段遥控器在多人一起使用时不得同频率,不然会发生互相干扰的情况,导致航模无法正常运行。
2.4g频段遥控器允许多人同时使用。
但是2.4g频段遥控器不能让被遥控设备处于被视线遮挡的范围),我们买控时会带接收机,控和接收有含有多个通道(即ch),关于新手对控的选择,在下面会提起。
现在我们说一下通道。
关于通道我们固定翼一般四个就够了,入门控一般都有六个通道,一些高端控有十几个通道,每个通道有各自的功能,比如我们固定翼,第一通道——对应副翼,控制飞机侧倾,让飞机滚转,盘旋等。
第二通道——对应升降舵,控制飞机俯仰,让飞机划弧,俯冲等。
第三通道——是油门通道,控制飞机速度,完成起飞,降落,吊机等第四通道——对应方向舵,控制飞机方向,让飞机转弯等固定翼一般这四个通道就满足我们了,但是很多人不知道其他通道有什么用途,第五通道,比如油动航模中作用是接收电,而在直机中闲置或者链接陀螺仪。
第六通道可以在固定翼中作为收放起落架使用,在直机中可以在一般油门螺距混控中使用,这些我们稍微了解一下就行了,比如有些通道还可以在拉烟,点火,射弹中使用。
遥控器的常用操作手法:
日本手、美国手、其他手、日本手:
右手摇杆上下——动力,右手摇杆左右——副翼,左手摇杆上下——升降,左手摇杆左右——方向舵。
美国手:
左手摇杆上下——动力,左右摇杆左右——方向舵,右手摇杆上下——升降,右手摇杆左右——副翼。
其他手:
非以上两类都可以归类于此,属于剑走偏锋,暂不作介绍
a、控电。
不同的遥控器用的电池也不同,有的用的是5号的干电池,有的用的是3芯的小放电倍数的锂电池,这样的锂电池就叫控电,这里控电和作为飞机动力的航模电池是有区别的。
b、混控。
混控是遥控器控制飞机的一种常用方式,在遥控器里可以设置,混控又包含三角混控,V尾混控等。
混控可以简单的理解为通道对通道的混合控制,比如1通道对2通道的混控,我们说1对2的混控就是1占主导地位,2占被动地位。
混控的比列不一样,舵机反应的情况也不同。
掌握混控的方法对新手来说极为重要。
希望大家多看看自己控的说明书,并自己多多摸索。
对于控的工作原理和内部组成感兴趣的可以在网上查一下资料,如果大家提议加上这部分,那么我们在下次修改的时候再加上。
对,还有,遥控器上有微调开关,刚入魔的伙伴一般不知道它有什么作用,现在我就简单说一下,一架飞机刚做好的时候,舵面不能保证绝对的水平,这就造成试飞偏航的情况,第一次试飞的时候我们可以根据飞机的姿态来判断舵面情况,然后用微调开关微调舵面。
2、航模电池
一般参数为多少ma多少c,比如3s2200ma25c.关于c数,网上真是众说纷纭,有说是瞬间爆发电流的,也有说最大放点倍率的,但是很多资深的魔友说是持续最高放电倍率,一般还会有瞬间放电倍率。
我们可以简单的理解为描述电池性能的参数,3s指的是3芯电池,该电池是由3个电池芯片串联组成的。
航模上用的比较多的是3s电池,当然也有2芯的,也有5芯的等(注:
S为片英文单词的缩写,一片锂电电压为3.7V,2片则为7.4V,3S则为11.1V),下面我们谈谈关于电池的充电问题
锂电池过充的原理和充电注意事项!
过充电:
锂电池芯过充到电压高于4.2V后,会开始产生副作用。
过充电压愈高,危险性也跟着愈高。
锂电芯电压高于4.2V后,正极材料内剩下的锂原子数量不到一半,此时储存格常会垮掉,让电池容量产生永久性的下降。
如果继续充电,由于负极的储存格已经装满了锂原子,后续的锂金属会堆积于负极材料表面。
这些锂原子会由负极表面往锂离子来的方向长出树枝状结晶。
这些锂金属结晶会穿过隔膜纸,使正负极短路。
有时在短路发生前电池就先爆炸,这是因为在过充过程,电解液等材料会裂解产生气体,使得电池外壳或压力阀鼓涨破裂,让氧气进去与堆积在负极表面的锂原子反应,进而爆炸。
因此,锂电池充电时,一定要设定电压上限,才可以同时兼顾到电池的寿命、容量、和安全性。
最理想的充电电压上限为4.2Vo(航模电池由于没有保护装置很容易过充,尤其是
在充电时电压设置错了,那麻烦就大了,所以大家在充电时千万要看清)充电电流对过充的影响:
锂离子电池过充电时,充电倍率对电池温度的影响很大。
有研究表明,以0.5C(500mA对电池进行过充,其表面最高温度与内部最高温度差值约为30E;以1C(1000mA对电池进行过充,其表面最高温度与内部最高温度差值约为80C。
(所以大家在给电池充电的时候尽量小电流充电,一般是0.2C,不要为了节省时间就暴力充电,这样既损坏电池,又危险。
)B6平衡充才有设置电压的选项,我们一般用的简易平衡充没有。
3、电调。
又称为电子调速器,用来给接收机供电和控制电机的转速。
电调上一般会
标有多少a,比如30A,很好理解,表示该电调允许经过的最大电流是30A,超过30A有可能烧坏电调。
电调的选择是根据电机判断的而不是根据电池来选择,固定翼30A的电调就足够了。
4、电机。
电机主要分为有刷电机和无刷电机两种,有刷电机就是有电刷的电机,无刷电机就是没有电刷的电机。
有刷电机目前飞机模型上不太使用,故这里就不多做介绍了。
无刷电机相比有刷电机而言,效率更高,功率更大,低转速时扭力特性更好。
是目前电动航模的主流选择。
无刷电机又分为内转子和外转子,内转子就壳不动,轴转,外转子就是轴跟壳一起转(底座固定),内转子电机在尺寸和转速上有一定优势,外转子电机在扭力,散热等方面占据优势。
电动机型号的命名规则,电机型号四位数字中的前2位代表直径,后2位代表长度。
如22122200kv,前面的2212中,22表直径,12表高度。
各厂家的命名方式有所不同,朗宇品牌的2212电机,指的是电机内部的线圈组部件的直径22mm长度12mm而有些其他厂家会把这一型号标注为2830电机,因为是电机外壳尺寸28mm长度30mm而其实这2个是差不多型号的电机。
另外对于电机型号还有一个参数,那就是KV值。
KV值表示电机在“空载”情况下,电子调速器“每提升1v”输出电压时,电机转速提升的数量。
肯定有人会想,既然同样规格的电机,KV值越高,电机转速就越快,那
力量就越大了。
其实并不是这样。
因为对于一款电机来说,尺寸的大小,就决定了它的最大功率的大小,既然功率上基本差不多,如果转速高了,那么电机的扭力就小了,也就是说只能安装更小的螺旋桨才能不超载工作。
绕线匝数多的,KV值低,最高输出电流小,但扭力大绕线匝数少的,KV值咼,最咼输出电流大,但扭力小单从KV值,不可以评价电机的好坏,因为不同KV值有不同的适用场合:
比如:
KV值小,达到同样的推力,要比高KV值的省电,所以四轴飞行器多使用小KV的电机
KV值大,同样的设备重量(电机、电调、电池),得到的最大推力要高过低KV值的电机
螺旋桨不属于电子设备,既然提到了电机,在这里我也把螺旋桨提一下。
a、桨的规格。
5030的意思是直径5英寸,螺距3英寸
螺距:
一片浆叶沿着螺旋线旋转一周,浆叶上升的距离就是螺距。
螺旋桨在一种不能流动的介质中旋转,那么螺旋桨每转一圈,就会向前进一个距离,连续旋转就形成一段螺旋。
同一片桨叶旋转一圈所形成的螺旋的距离,就称为螺距。
想飞机飞的慢应该选小螺距,飞的快选择大螺距,但是还要看马达的KV值。
b、那么我们来看一下一般情况下电机与螺旋桨的配合。
相同的电机,不同的KV值,用的螺旋桨也不一样,每个电机都会有一个推荐的螺旋桨,推荐的螺旋桨多是最佳的性能的
简单的说,相同的电机和电池,大KV值用小的螺旋桨,小KV值用大的螺旋桨
相对来说螺旋桨配得过小,不能发挥最大推力相对来说螺旋桨配得过大,电机会过热,会使电机退磁,造成电机性能的永久下降。
3S电池下;
KV900-1000的电机配1060或1047浆,9寸浆也可
KV1200-1400配9050(9寸浆)至8*6浆
KV1600-1800左右的7寸至6寸浆
KV2200-2800左右的5寸浆
KV3000-3500左右的4530浆
2S电池下;
KV1300-1500左右用9050浆
KV1800左右用7060浆
KV2500-3000左右用5X3浆
KV3200-4000左右用4530浆
关于为什么要这样配置?
先来解释一个名词。
理论桨速(英寸/分钟)=螺距(英寸)*转速(圈/分钟)假设同样使用2212电机,其中一个使用kv1000+9*5桨,另一个使用kv2200+6*4桨。
在12v电压的时候,带桨的情况下,kv1000的电机转速是9000转/分钟(大约),kv2200的电机转速是18000转/分钟(大约)。
kv1000电机+9*5桨的理论桨速为:
9000(转/分钟)*5(英寸)=45000(英寸/分钟)=68.58(公里/小时)
kv2200电机+6*4桨的理论桨速为:
18000(转/分钟)*4(英寸)=72000(英寸/分钟)=109.73(公里/小时)
因为9*5桨的直径比6*4桨的直径大很多,所以在两套动力速度都为
0的时候,kv1000电机产生的力要大于kv2200电机产生的力。
但是如果把两套动力都放在速度为70公里/小时的风洞里,又是哪套动力配置产生的力量大呢。
(以上仅是假设和打比方,数据不尽正确,仅供参考。
)
很显然,kv1000+9*5动力系统适合于低速,阻力大的飞机。
kv2200+6*4动力系统适合于高速,阻力小的飞机。
虽然“高转速电机+小桨”在低速时推力
不及“低转速电机+大桨”,但是在高速时更有效率,这也就是为什么“高速机”需要使用“高转速电机+小桨”的原因。
关于按照机型翼大小展选择桨的具体数据我没找到,只是记得翼展大的配大寸桨和小KV电机,翼展小的配小寸桨和大
KV电机
c、机型与电机、浆的关系:
一般来说:
浆越大对飞机所产生的反扭力越大,所以浆的大小与机的翼展大小有着一定关系,但浆与电机也有着上面所讲的关系。
例如用1060浆,机的翼展就得要在80CM以上为合适,不然的话机就容易造成反扭;又如用8*6的浆翼展就得在60以上。
再比如:
用4530浆做翼展1米以上机行否?
是可以,但飞机飞起来会很耗电,因为翼展大飞行的阻力大,而4530浆产生的推力相对情况下小(上面有提到)。
所以模友在选择玩什么机型的时候就要注意这4者的关系,尤其是新手选择机型,一定要看这机型翼展大小选择配电机、浆、电池,特别要注意的是,不能用大浆配高KV的电机,否则烧电机还影响了电池,有可能连电调也烧掉。
另外,有些模友误认为,电机的推力越大,飞机就能更加克服阻力飞得更快,这个问题就留给有兴趣的模友去讨论一下了。
d、快速桨与慢速桨
慢飞桨通常是指用在慢速飞机上,在低转速下即可实现较大拉力,发挥出较高效率的螺旋桨。
这类桨大多外侧面积较大也较厚实,主要就是用桨叶的外侧部分切割空气产生拉力。
但是因为其气动外形设计的因素,慢飞桨通常不宜在高转速下工作,转速过高的话,除了动力效率会急剧下降之外,柔弱的桨根部分还可能会因无法承受沉重的桨叶外侧的离心力而有断裂的危险。
9047电动桨,为一款典型的慢飞桨,有测试数据说:
在6000转左右即可产生大约500克以上的静拉力,拉力效率还真不错。
相反,快速桨是用在高速机型上的螺旋桨,外形又细又长,桨叶内侧和外侧的宽度没啥区别。
这类桨在低转速下无法提供多大的拉力,但在高转速下的阻力很小,能够在飞机本身速度很快时仍然保持一定的拉力。
APC5X5高速背推桨,在高达每分钟28000转的极速下依然能够产生强劲的推力。
e、电机推力(拉力线)的调整:
对于固定翼飞机来说,飞机上主要受到重力,飞行阻力,升力,以及电机推力(拉力),以及螺旋桨反扭力的影响。
为了抵消部分螺旋桨反扭力的影响,从机尾向机头方向看,电机安装角度一般有向右3~5°的右拉安装角(常规右旋螺旋桨)。
螺旋桨越大,一般右拉角越大。
为了使飞机飞行中俯仰力矩平衡,电机相对飞机纵轴一般有向下1.5~3°的下拉安装角。
实际数值应当在试飞过程中进行调整,调整的目的就是在油门增减,动力变化的时候,飞行姿态没有明显的改变为宜(避免加油门时抬头,避免加油门时飞机沿反扭力方向侧倾)在精细的调整过程中,也可以通过油门与升降以及副翼的混控来进行调校。
5、舵机(又叫伺服器)舵机是一个根据遥控信号来决定摇臂偏转角度的器件,通过摇臂上连接的钢丝来改变飞行控制翼面的偏转角度,来完成飞行姿态的调整。
舵机根据脉冲电压不同来控制舵机摇臂偏转角度。
(详情请查看XX文库{舵机伺服器原理})
6、充电器
这里的充电器特指航模用的锂电池平衡充电器。
常用的有B6平衡充和简易平衡充。
由于锂电池的充放特性,聚合物锂电池禁止过充以及过放。
锂电池充满电压单片不得超过4.2v,放电中单片电池带负载时电压不得低于3.3v。
所以锂电池平衡充电器是单片单独调整充电电流,精确保证充电电压的充电设备,不可使用用普通充电器代替。
第二章空气动力学原理
我们对航模的一般构造已经了解的差不多了,但是飞机是怎么飞起来并完成一系列的复杂的动作呢?
下面我们就来了解一下航模的空气动力学一些基础知识。
第一节航空模型的种类
现代航空模型运动分为自由飞行模型飞机
线操纵模型飞机
无线电遥控模型飞机
像真模型飞机
电动模型飞机
按动力方式分为:
活塞发动机
喷气发动机
橡筋动力模型飞机
无动力的模型滑翔机等
第二节基本定律
1、空气的压强
气体的压力由于气体分子在不断运动时冲击到物体表面而产生的。
空气的压强就是单位面积所受到的空气压力。
在一密闭容器内(分子数目不变),温度越高,分子运动越活跃,速度增大,冲击力就大,压力就大,压强就大。
2、空气的密度:
0.465P
273t
大气密度为:
千克/m3大气压强:
毫米汞柱
大气温度:
C
3、空气的粘性
空气的粘性随着温度的变化而变化,温度越低空气的粘性越小,温度越高空气粘性越大(液体相反的,液体的粘性是随着温度的升高而降低的)。
空气流过物体表面的时候,就像润滑油一样,最靠近物体表面的空气是附着在物体表面的,离表面稍远,空气的速度便稍大。
达到一定距离后,粘性的作用就表现不明显了,在这附近的气流速度等于没有黏性作用时的速度,所以空性的黏性作用只是明显表现在物体表面薄薄的一层空气内,离开了这紧靠着物体表面的一薄层便可以认为空气是没有黏性的,这一薄层空气成为边界层(或附面层)。
空气动力学的几个基本原理
速度与加速度以及牛顿的三大定律我们都学过,在这不多解释。
1、连续性原理。
流线:
流体微团流动时所经过的路径叫流线
Vi
VS常数
(S1,S2两个截面)
(不可压缩流体)
VAV2S2
(由图可知)
S2
Vi
截面窄,流线密的地方,流体的速度快;截面宽,流线稀的地方,流体的速度慢。
Si
S2
ViSiV2S2
3、伯努利定律(能量守恒定律)
当气体水平运动的时候,它包括两种能能量:
V种是垂直作用在流体表面的静压强的能量,另一种是由于气体运动而具有的动压强强的能量,这两种能量之和是一个常数。
静压强,用P表示,单位是千克力/米2;
动压强用pv2/2表示,
其中p是空气密度。
单位是千克力/米2;V是流速,单位是米/秒。
4、升力产生
当一股气流,由于机翼的插入,被分成上下两股,通过机翼以后合为一股。
由于机翼上表面拱起,使得上方那股气流的通道变窄。
根据气流连续性原理和伯努利定理可以得知V机翼上方的p虽比机翼V方的/压强小,P也就是说机翼下表面受到向上的压力比机翼上表面受到向下的压力大,这个压力差就是机翼产生的升力。
上一节我们了解了飞机升空的原P但是飞机是怎样完成滚转,划弧等一些复杂的动作呢,
作用于飞机的力要刚好平衡,如果不平衡就是合力不为零,依牛顿第二定律就会产生加速度,为了分析方便我们把力分为X、Y、Z三个轴力的平衡及绕X、Y、Z三个轴弯矩的平衡。
轴力不平衡则会在合力的方向产生加速度,飞行中的飞机受的力可分为升力、重力、阻力、推力〔如图1-1〕,升力由机翼提供,推力由引擎提供,重力由地心引力产生,阻力由空气产生,我们可以把力分解为两个方向的力,称x及
y方向〔当然还有一个z方向,但对飞机不是很重要,除非是在转弯中〕,飞机等速直线飞行时x方向阻力与推力大小相同方向相反,故x方向合力为零,飞机速度不变,y方向升力与重力大小相同方向相反,故y方向合力亦为零,飞机不升降,所以会保持等速直线飞行。
圖1-1
弯矩不平衡则会产生旋转加速度,在飞机来说,X轴弯矩不平衡飞机会滚转,Y轴弯矩不平衡飞机会偏航、Z轴弯矩不平衡飞机会俯仰〔如图1-2〕。
Z軸(俯仰軸)
Y軸(偏航軸)
(滾轉軸)X軸
圖1-2
伯努利定律是空气动力最重要的公式,简单的说流体的速度越大,静压力越小,速度越小,静压力越大,这里说的流体一般是指空气或水,在这里当然是指空气,设法使机翼上部空气流速较快,静压力则较小,机翼下部空气流速较慢,静压力较大,两边互相较力,于是机翼就被往上推去,然后飞机就飞起来,以前的理论认为两个相邻的空气质点同时由机翼的前端往后走,一个流经机翼的上缘,另一个流经机翼的下缘,两个质点应在机翼的后端相会合,经过仔细的计算后发觉如依上述理论,上缘的流速不够大,机翼应该无法产生那么大的升力,现在经风洞实验已证实,两个相邻空气的质点流经机翼上缘的质点会比流经机翼的下缘质点先到达后缘
俯仰运动
(1)升降舵的运动。
当按下键盘上键或将摇杆向前推时,升降舵会向上运动。
反之则向下运动。
当然这根据个人习惯,你也可以设置成摇杆下拉,升降舵向上。
2、升降舵运动产生的俯仰运动:
这里仅举升降舵上偏的例子。
由于升降舵上偏,使气流对升降舵产生了垂直翼面向下的力,这个力产生了向下的力矩,使机尾以丫轴向下转动,同时也是机头向上转动。
由于迎角增大升力增大,所以在一定范围内,飞机会上升。
5、滚转运动:
(1)副翼的运动当按下键盘左键或向左偏转摇杆时,左侧副翼会上偏,右侧会下偏,
反之亦然。
(2)副翼产生的滚转运动
仅以左转为例。
当左侧副翼上偏时,会受到气流施加的向下的力,从而使左侧机翼绕
X轴向下偏转,右侧机翼向上偏转。
又由于升力是垂直于翼面的(仅指丫方向上),所以升力产生了向左的分力,使飞机向左做圆周运动,这就是飞机转弯的原理。
需要注意的是,在转弯时没有改变升力大小却产生了分力,所以升力在竖直方向上的分力减小,飞机可能会掉高度。
3、偏航运动
(1)方向舵的运动
按住小键区0键或向左扭摇杆,方向舵就会左偏。
按住小键区ENTER键或向右扭摇杆就会向右偏。
2)由方向舵产生的偏航运动。
仅以方向舵左偏为例。
当方向舵左偏时,舵面受空气施加的向右后方的压力,此压力产生力矩,使机尾绕Z轴向右旋转,同时机头也向左旋转,由于速度方向未改变,所以飞机会发生偏航(也叫侧滑)。
这个动作在风中校正航向和转弯时使消除不正常偏航时使用,需注意的是该动作不是飞机转弯的主要成因。
还要注意的一点是,该动作也会造成一定程度的滚转。
由于偏航时,左侧机翼相对气流速度减慢,右侧机翼加快,造成两侧机翼不对称,所以飞机会发生滚转。
第四节模型飞机上的阻力阻力:
诱导阻力、摩擦阻力、压差阻力、干扰阻力。
摩
 升级会员
升级会员 