沉降监测方案参考.docx
《沉降监测方案参考.docx》由会员分享,可在线阅读,更多相关《沉降监测方案参考.docx(9页珍藏版)》请在冰豆网上搜索。
沉降监测方案参考
5.15沉降、裂缝监测专项方案
5.15.1监测目的及依据
监测目的:
为及时了解基坑开挖产生的土体水平位移,保证基坑、周边道路及建筑物的安全,指导基坑、开挖施工,必须进行有效监测。
现场监测的结果用于信息化反馈优化设计,使设计达到优质安全、经济合理、施工快捷的目的。
通过监测数据可判断前一步施工工艺和施工参数是否符合预期要求,以确定和优化下一步的施工参数,做到动态设计、信息化施工。
通过监测收集数据,为类似工程设计、施工及相关规程的制定积累经验。
监测依据:
(1)本项目设计图纸;
(2)《建筑基坑工程监测技术规范》(GB50497-2009)
(3)《建筑变形测量规范》JGJ8-2007
(4)《工程测量规范》GB50026-2007
(5)《国家一、二等水准测量规范》GB/T12897-2006
(6)《建筑地基基础设计规范》GB50007-2011
5.15.2监测内容及监测点布置
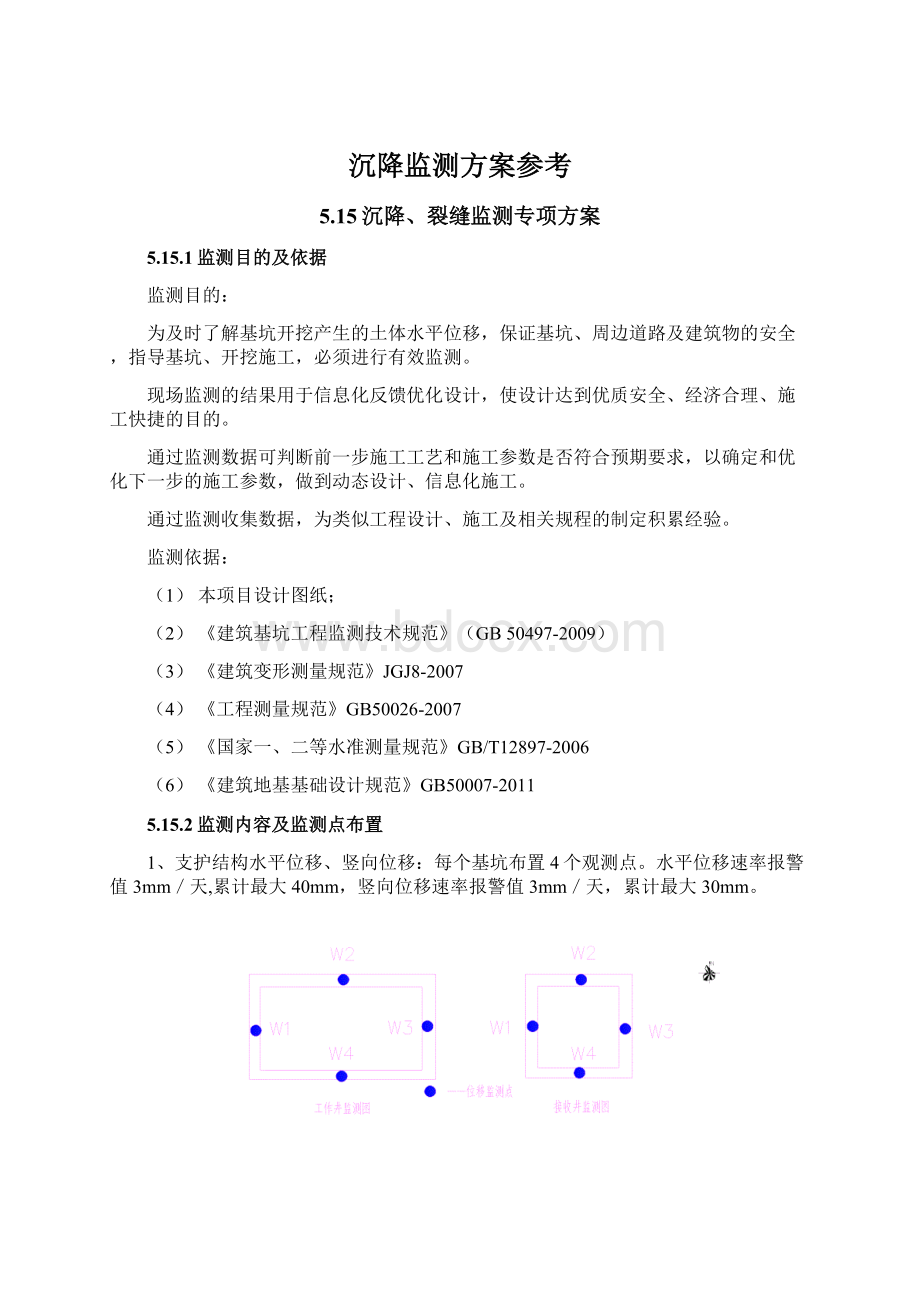
1、支护结构水平位移、竖向位移:
每个基坑布置4个观测点。
水平位移速率报警值3mm/天,累计最大40mm,竖向位移速率报警值3mm/天,累计最大30mm。
2、周边地表竖向位移:
分别距离基坑围护桩3m、5m布置地表监测点,每个基坑8个测点。
地表沉降报警值50mm。
高速路面、地表裂缝:
在顶管沿线地表布置9个沉降监测点,间距13m;当原有裂缝增大或出现新裂缝时,及时增设监测点。
每一条裂缝的测点至少设2组,测点设置在裂缝的最宽处及裂缝末端。
地表裂缝报警值宽度达10mm。
5.15.3监测方法
(1)高程基准网
基准点布设:
在远离基坑施工影响区域以外(大于4倍基坑深度)的稳固建筑物上布设基准点。
共布设3个。
工作基点的布设以方便沉降监测,且相对稳定为原则,埋设方式同基准点。
可随施工进度的推进和施工现场通视情况临时增设。
保护措施:
为防止基准点破坏,基准点埋设在不同建筑物上,共布设3个。
如果某个基准点被破坏,在附近稳定建筑物上立即补埋。
高程系统:
独立高程系,假定A点起算高程为5.000m。
技术要求:
由基准点与工作基点组成基本控制网,构成闭合或附合水准路线。
每1月检测1次,稳定后每2个月检测1次,基准点稳定标准为每次测量平差后高程之差小于±1.0mm。
当发现数据异常时立即复测。
高程基准网按表1所示的技术要求进行观测。
表1高程基准网测量主要技术要求
序号
项目
限差
1
测站高差中误差
0.5毫米
2
往返较差及环线闭合差
±1.0
毫米(n为测站数)
3
检测已测高差较差
±1.5
毫米(n为测站数)
4
视线长度
50米
5
前后视的距离较差
2米
6
任一测站前后视距差累计
3米
7
视线离地面最低高度
0.3米
使用仪器:
观测使用DS05级水准仪,DINI03电子水准仪及配套铟瓦条码水准尺。
观测前和使用过程中仪器及标尺定期送国家计量单位检定认可,确保仪器设备处于受控状态;测量过程中按规范定期进行i角检测,保证i角≤±15″。
技术措施:
为保证精度,在本工程基准网测量中,强调采取以下措施:
(1)水准观测在标尺分划成像清晰而稳定时进行。
(2)水准测量的观测顺序为:
后—前—前—后
(3)同一测站上观测时,严格按表1相关要求控制前后视距差,不得两次调焦。
(2)平面基准网
基准点布设:
在远离基坑施工影响区域以外(大于3倍基坑深度)的稳固建筑物上布设基准点。
共布设4个。
采用强制对中螺栓在基坑周边较高建(构)筑物顶部固定棱镜或贴片棱镜作为标志,如图3所示。
保护措施:
基准点安装在楼顶不易破坏的地方。
坐标系统:
采用独立坐标系。
为方便计算,独立坐标系坐标轴与设计轴线大致平行。
技术要求:
基准点与测站点构成基本控制网,以空间后方交汇的方法进行控制测量,开始时每月检测1次,稳定后每2个月检测1次,稳定标准为每次测量平差后坐标之差小于±3.0mm。
具体技术要求如表2所示。
表2平面基准网主要技术要求
序号
项目
指标或限差
1
坐标中误差
1.0毫米
2
水平角观测测回数
6
3
测角中误差
1.0秒
4
测边相对中误差
≤1/100000
5
每边测回数
往返各4测回
6
距离一测回读数较差
1.0毫米
7
距离单程各测回较差
1.5毫米
8
气象数据测定的最小读数
温度0.2摄氏度,气压50帕
使用仪器:
TS15A全站仪以及配套棱镜。
技术措施:
对使用的全站仪、觇牌应在项目开始前和结束后进行检验,项目进行中也应定期进行检验,尤其时照准部水准管及电子气泡补偿的检验与校正;
观测应做到三固定,即固定人员、固定仪器、固定测站;
仪器、觇牌应安置稳固严格对中整平;
在目标成像清晰稳定的条件下进行观测;
仪器温度与外界温度一致时才能开始观测;
应尽量避免受外界干扰影响观测精度,严格按精度要求控制各项限差。
(3)支护结构水平位移监测
采用测量机器人自由设站,按空间后方交会法自动观测各点坐标。
基准点与通视范围内的监测点在同一测站进行观测,测出各点的相对坐标,利用工作基点相对坐标与其真值进行坐标转换,统一监测点与基准点坐标系。
根据各期坐标值与初始值比较,计算出监测点向基坑内侧的变形量。
观测中应注意以下事项:
对使用的全站仪、棱镜应在项目开始前和结束后进行检验,项目进行中也应定期进行检验,尤其是照准部水准管及电子气泡补偿的检验与校正;
观测宜做到三固定,即固定人员、固定仪器、固定测站;
仪器应安置稳固严格整平;
在目标成像清晰稳定的条件下进行观测;
仪器温度与外界温度一致时才能开始观测;
应尽量避免受外界干扰影响观测精度,严格按精度要求控制各项限差。
水平位移监测的技术要求如表3所示。
表3水平位移监测主要技术要求
序号
项目
指标或限差
1
水平角观测测回数
2
2
坐标中误差
1.0mm
3
每边测回数
2
数据处理及分析
观测和记录采用全站仪内置程序及CF卡、SD卡自动完成,在观测过程中自动完成各项限差指标控制,观测完成后将数据传输至计算机,求得各监测点坐标平均值。
通过各期变形观测点二维平面坐标值,计算投影至垂直于基坑方向的矢量位移,并计算各期阶段变形量、阶段变形速率、累计变形量等数据。
并结合工况编制各测点水平位移监测报表。
(4)支护结构竖向位移监测
采用几何水准法。
以基准点为起算点,观测过程中的主要技术要求见表4。
表4竖向位移监测网主要技术要求
序号
项目
限差
1
测站高差中误差
±0.5毫米
2
往返较差及环线闭合差
±1.0
毫米(n为测站数)
3
检测已测高差较差
±1.5
毫米(n为测站数)
4
视线长度
50米
5
前后视的距离较差
2.0米
6
任一测站前后视距差累计
3米
7
视线离地面最低高度
0.3米
观测采用闭合水准路线时可以只观测单程,采用附合水准路线形式必须进行往返观测,取两次观测高差中数进行平差。
观测注意事项:
对使用的电子水准仪、条码水准尺应在项目开始前和结束后进行检验,项目进行中也应定期进行检验。
当观测成果异常,经分析与仪器有关时,应及时对仪器进行检验与校正;
观测宜做到三固定,即固定人员、固定仪器、固定测站;
观测前应正确设定记录文件的存贮位置、方式,对电子水准仪的各项控制限差参数进行检查设定,确保附合观测要求;
应在标尺分划线成像稳定的条件下进行观测;
仪器温度与外界温度一致时才能开始观测;
数字水准仪应避免望远镜直对太阳,避免视线被遮挡,仪器应在生产厂家规定的范围内工作,震动源造成的震动消失后,才能启动测量键,当地面震动较大时,应随时增加重复测量次数;⑦由往测转向返测时,两标尺应互换位置,并应重新整置仪器;⑧完成闭合或附合路线时,应注意电子记录的闭合或附合差情况,确认合格后方可完成测量工作,否则应查找原因直至返工重测合格。
数据处理及分析
每次观测结束后,核对和复查观测结果,验算各项限差,确认全部符合规定要求后,对观测数据进行平差计算,得到本次高程值,通过高程值计算阶段沉降量、阶段变形速率、累计沉降量等,并结合工况编制各测点沉降监测报表。
5.15.4监测频率及数据处理
土方开挖前做好监测点的布置,基础数据的采集工作,开完前监测两次;在基坑开挖期间每天至少监测1次,报警时每天测2~3次。
由我项目部测量人员将每次监测的结果及时通知(日头通知)项目经理,并在当天下午6点前将《监测日报》整理好,并由资料员报监理、建设单位。
相应监测警戒值如下:
观测项目
警戒值(mm)
控制值(mm)
危险值(mm)
管线基坑支护结构顶部水平位移
30
40
50
管线基坑支护结构顶部沉降
30
40
50
管线基坑支护结构测斜
30
40
50
管线基坑地下水位
1000
2000
3000
周围民用建筑物沉降
10
15
20
5.15.5沉降观测及预防措施
为防止顶管施工给荣乌高速路造成沉降影响,采用泥水平衡顶管工艺,使出土和顶进所造成的土压力为0,从而避免道路的沉降及隆起。
为掌握道路路面变化,沿顶进轴线每5米设一观测点,顶进中及完成后三个月内定期观测。
顶进中每2小时观测一次,完工后每5天观测一次。
做好详细记录,提供给顶进操作及补强作业,严格控制荣乌高速路的沉降量≤10mm。
5.15.6路面监测方案
1.监测点布设
本项目高速道路、地表监测点布设9个监测点;地表沉降测点布设根据周边道路情况以及围护结构自身监测点布置情况综合考虑,地表监测点布点间距约13米。
监测距离为约130m。
2.监测点埋设及保护措施
使用道钉布设监测点,用红色油漆标识,为防止测点受碾压影响,监测点采用如图10的形式埋设,并且应做好清晰标记,方便保存。
3.监测仪器、方法、数据处理及分析
第一套监测方法:
同5.15.3围护桩顶部竖向位移监测。
第二套监测方法:
使用全站仪监测。
三角高程测量的基本原理如图,A、B为地面上两点,自A点观测B点的竖直角为α1.2,S0为两点间水平距离,i1为A点仪器高,i2为B点觇标高,则A、B两点间高差为:
h1.2=S0tga1.2+i1-i2
上式是假设地球表面为一平面,观测视线为直线条件推导出来的。
为了提高三角高程测量的精度,通常采取对向观测竖直角,推求两点间高差,以减弱大气垂直折光的影响。
三角高程测量的方法
如图一所示,设A,B为地面上高度不同的两点。
已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+HAB得到B点的高程HB。
此主题相关图片如下:
图中:
D为A、B两点间的水平距离
а为在A点观测B点时的垂直角i
为测站点的仪器高,t为棱镜高
HA为A点高程,HB为B点高程。
V为全站仪望远镜和棱镜之间的高差(V=Dtanа)
首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则hAB=V+i-t
故HB=HA+Dtanа+i-t
(1)
这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B两点间的距离很短时,才比较准确。
当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。
这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。
我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:
1、全站仪必须架设在已知高程点上
2、要测出待测点的高程,必须量取仪器高和棱镜高。
HB′=HA+i-t+D′tanа′(5)
按三角高程测量原理可知
HB′=W+D′tanа′+i′-t′(6)
将(3)代入(6)可知:
HB′=HA+i-t+D′tanа′+i′-t′(7)
这里i′,t′为0,所以:
HB′=HA+i-t+D′tanа′(8)
由(5),(8)可知,两种方法测出的待测点高程在理论上是一致的。
也就是说我们采取这种方法进行三角高程测量是正确的。
综上所述:
将全站仪任一置点,同时不量取仪器高,棱镜高。
仍然可以测出待测点的高程。
测出的结果从理论上分析比传统的三角高程测量精度更高,因为它减少了误差来源。
整个过程不必用钢尺量取仪器高,棱镜高,也就减少了这方面造成的误差。
同时需要指出的是,在实际测量中,棱镜高还可以根据实际情况改变,只要记录下相对于初值t增大或减小的数值,就可在测量的基础上计算出待测点的实际高程。
委托第三方监测单位进行施工监测;由第三方有资质的单位进行施工监测,如发现沉降出现异常立即停工,并向外环养管单位汇报。
确保施工期间道路安全通行。
Welcome!
!
!
欢迎您的下载,
资料仅供参考!
 升级会员
升级会员 