霍尔传感器直线电机位置检测.docx
《霍尔传感器直线电机位置检测.docx》由会员分享,可在线阅读,更多相关《霍尔传感器直线电机位置检测.docx(12页珍藏版)》请在冰豆网上搜索。
霍尔传感器直线电机位置检测
电流检测部分
本控制系统中永磁直线电机的两相电枢电流通过霍尔电流传感器得到,另外一相电流通过计算得到。
电流传感器采用LEM公司生产的LTSR
-6-NP型电流传感器,该产品具有高精度,高线性度,高响应速度,高频率带宽,高电流过载能力,低温漂,低接入损耗,以及对外部信号的高抗干扰能力,非常适合在永磁电机伺服系统中使用。
根据选择不同的引脚接法,该产品可以提供三种不同的额定采样电流值,分别为2A、3A和6A电流有效值,对应的最大采样电流值分别为6.4A,9.6A和19.2A。
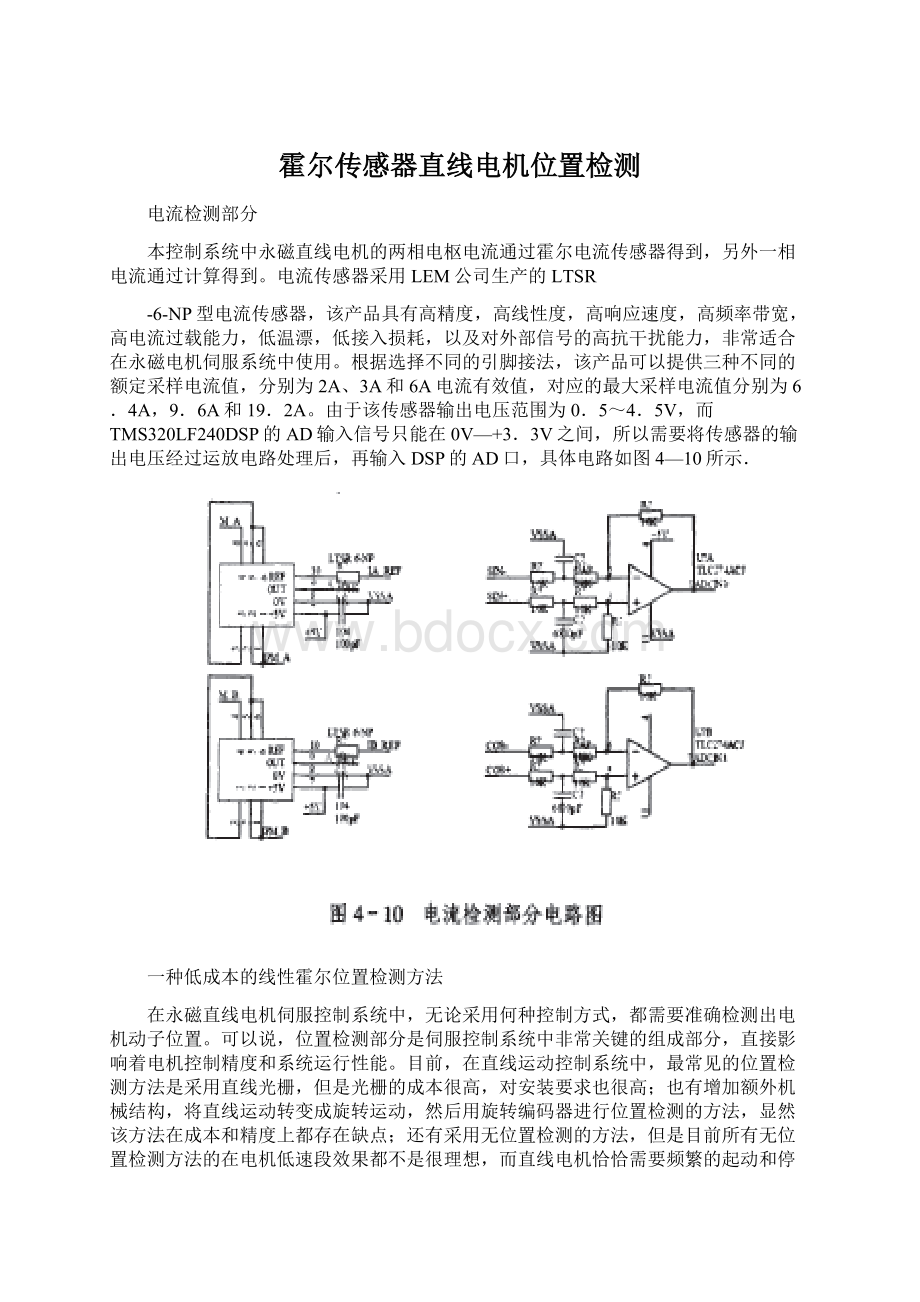
由于该传感器输出电压范围为0.5~4.5V,而TMS320LF240DSP的AD输入信号只能在0V—+3.3V之间,所以需要将传感器的输出电压经过运放电路处理后,再输入DSP的AD口,具体电路如图4—10所示.
一种低成本的线性霍尔位置检测方法
在永磁直线电机伺服控制系统中,无论采用何种控制方式,都需要准确检测出电机动子位置。
可以说,位置检测部分是伺服控制系统中非常关键的组成部分,直接影响着电机控制精度和系统运行性能。
目前,在直线运动控制系统中,最常见的位置检测方法是采用直线光栅,但是光栅的成本很高,对安装要求也很高;也有增加额外机械结构,将直线运动转变成旋转运动,然后用旋转编码器进行位置检测的方法,显然该方法在成本和精度上都存在缺点;还有采用无位置检测的方法,但是目前所有无位置检测方法的在电机低速段效果都不是很理想,而直线电机恰恰需要频繁的起动和停止,采用无位置检测方法获得理想的效果难度较大,尚未有实用的解决方案提出。
因此,本节将介绍一种低成本的利用线性霍尔元件对永磁直线电机进行位置检测的方法。
§4.6.1线性霍尔位置检测方法的基本原理
线性霍尔元件可以用来检测磁通密度,在一定磁场强度范围内,其输出电压与被检磁场磁通密度成线性关系.永磁直线同步电机气隙磁场为正弦分布,因此很容易通过检测气隙磁场磁通密度的方法来确定电机动子的位置。
本节以空心式圆筒型永磁直线电机为例,具体介绍该方法。
电机及霍尔元件的安装位置示意图如图4—18所示.因为电机只沿Z轴方向做运动,所以只需要检测电机动子在z轴上的位置。
在第三章中,已经分析了该电机气隙磁密Br,沿Z轴基本成正弦分布,在一对极范围内,也就是一个周期内,Br不是Z的单值函数,因此不能只用一个霍尔元件来唯一确定电机的位置,至少要使用两个霍尔元件来进行检测。
在安装两个霍尔元件时应满足以下条件:
(1)两个霍尔元件r轴方向保持水平;
(2)两个霍尔元件Z轴方向间距为二分之一极距,即τ/2.
该方法的基本工作原理如图4—19所示.因为电机的空载气隙磁密耳沿Z轴成正弦分布,那么,当电机动子运动经过一个极距的距离时,霍尔元件的输出电压也同样是正弦曲线.图4—19中的正弦曲线既是磁密耳的分布曲线,也可以理解为霍尔元件的输出电压曲线。
假设某个时刻,电机A相绕组轴线与图4—19中原点位置重合,霍尔元件a、b与A相绕组轴线的距离分别为za和zb,且zb=za+τ/2。
此时两个霍尔元件的输出电压分别为Ua和Ub,由于两个霍尔元件在安装位置上相差了90度的电角度,则Ua和Ub可以分别表示为,
Ua=Umsinθl
Ub=UmCOSθl
θl——霍尔元件a位置的电角度;
Um——对应最大磁密时,霍尔元件的输出电压。
根据Ua、Ub可以方便地计算出霍尔元件a所在位置对应的电角度θl,一般有“双霍尔算法”和“单霍尔算法”两种算法:
(1)双霍尔算法
所谓“双霍尔算法”就是利用两个霍尔元件的输出电压来计算电角度,霍尔元件a所在位置对应的电角度可以表示为,
(2)单霍尔算法
所谓单霍尔算法是只利用一个霍尔元件的输出电压计算电角度,霍尔元件a所在位置对应的电角度可以表示为,
“单霍尔算法”虽然在计算时只利用了一个霍尔元件的输出电压Ua但是由于反正弦函数,在一个周期范围内,其结果不是唯一确定的,必须通过另外一个霍尔元件输出电压Ub的正负值来辅助判断,最终确定电角度的唯一解。
在得到霍尔元件a所在位置对应的电角度后,A相绕组轴线位置对应的电角度就可以表示为,
这样,通过对霍尔元件输出电压进行简单地三角函数运算,就能方便地判断出电机动子位置电角度.在预先设定初始位置的情况下,也可以将电角度位置转换成Z轴绝对位置。
§4.6.2线性霍尔检测方法准确性分析
§4.6.2.1空载状态准确性分析
总体来说,这种线性霍尔位置检测法是通过检测电机气隙磁场来检测电机位置,检测结果自然受到磁场的影响,通过对霍尔元件安装位置区域气隙磁场进行有限元分析,可以具体分析该方法的准确性。
首先考虑空载状态下,该区域气隙磁密的分布情况,分别选择半径为30ram,31mm,32ram,33mm,绘制磁密且沿Z轴分布曲线,如图420所示。
从图420中可以看出,在不同位置上,虽然磁密幅值不同,但是基本都成正弦分布,只是在峰值位置附近有一点畸变,所以,理论L霍尔元件安装在这几个位置都是可行的,以霍尔元件安装在r=30mm处为倒,根据“双霍尔算法”和“单霍尔算法”,分别计算得到霍尔元件a的电角度位置0.的计算结果,如图42I所示。
从图4—21中可以看出,“双霍尔算法”的计算结果与实际位置电角度的真实值基本重合,误差很小.“单霍尔算法”的计算结果在θ1=90°和θ1=270°附近时,计算结果与真实值之间有较大误差,这是因为该算法的计算结果完全决定于霍尔元件a检测的气隙磁密大小,而气隙磁密分布在峰值附近,也就是θ1=90°和θ1=270°位置附近存在畸变,所以该算法计算结果在这些区域也存在较大误差。
“双霍尔算法”的计算结果取决于两个霍尔元件检测的气隙磁密大小,有效地减小了计算误差。
表4—1列出了部分位置,两种算法的计算值和真实值。
图4—22绘制出“双霍尔算法”计算误差随位置变化的曲线,从图中可以看出,该算法的计算误差很小,最大的绝对误差只有,一个周期内的平均误差只有,基本可以满足位置检测的精度要求。
图4—23绘制出“单霍尔算法”计算误差随位置变化的曲线,该算法的计算误差很大,最大的绝对误差超过了,不适合实际应用。
§4.6.2.2额定状态准确性分析
在分析了空载状态下,线性霍尔元件位置检测方法的准确性后,再来分析在额定负载情况下,电枢反应对检测结果的影响.考虑到“单霍尔算法”计算误差较大,所以下面的分析都采用“双霍尔算法”。
负载状态下,电枢反应影响了磁场分布,r=z30mm处,空载和额定负载情况下气隙磁密耳分布曲线对比情况如图4—24所示.图4—24中,在z=0~76mm区域内存在电枢绕组,在此区域中电枢反应对气隙磁密分布的影响非常明显,而在此区域之外,电枢反应影响就非常有限了.
如果考虑将霍尔元件安装在特殊的位置,使霍尔元件a与电机A相绕组间距为极距f的整数倍,即这种情况下,霍尔元件a的输出电压将与A相绕组反电势保持同相位,霍尔元件a位置的电角度即是A相绕组的电角度。
当时,“双霍尔算法”计算得到霍尔元件a位置电角度与真实值如图4—25所示。
从图4—25中看出,在额定负载情况下,利用霍尔检测得到的电角度值与真实值之间误差同样很小,表4—2列出了部分位置,霍尔检测方法计算值和真实值。
额定负载情况下,电角度计算结果误差曲线如图4—26所示,最大绝对误差为,比空载情况下的最大绝对误差大,一个极距范围内的平均误差为。
§4.6.3线性霍尔元件位置检测硬件电路
在硬件电路中,采用ALLEGRO公司生产的UGN3503型线性霍尔元件,该
产品可以精确跟踪磁场的细微变化,具有高敏感度,输出电压高线性度,低噪声,低温漂,以及体积小,磁优化封装等特点.该霍尔元件能够检测-900~900G范围磁通密度的磁场,静态(0G磁通密度下)输出电压为2.5V,灵敏度为1.3mV/G.线性霍尔元件的工作电路也非常简单,只需要对线性霍尔元件的输出电压经过放大电路和差分电路的处理,最后输出±sin(霍尔元件a输出电压)和±cos(霍尔元件b输出电压)四路信号,工作电路图如图4—28所示.在实际硬件电路中,放大器选用1rI公司生产的TLE2024芯片,该芯片内部集成了四个独立的放大器;差分电路选用Linear公司生产的LTCl992芯片,位置检测的硬件电路如图4—28所示.
§4.6.4线性霍尔位置检测方法实验
线性霍尔位置检测器硬件实物如图4—29所示
位置检测器输出的sin、cos两路信号如图4—30所示.,根据sin,cos采样信号计算出的电机位置电角度和实际电角度如图431所示,该方法检测得到电机位置的电角度与实际电角度基本一致。
检测误差如图4—32所示,实测到最大误差为。
一对极范围内平均误差为,均比理论分析所得到的误差要大,这主要是因为检测墨中霍尔元件的实际安装位置无法达到理想的安装条件,sin、cos信号的幅值无法达到绝对一致所导致的。
表4-3列出一对极范围内,检测器检测得到的位置和电角度与实际位置、电角度值.
线性霍尔元件体积小、造价低、安装方便,基本解决了传统位置传感器所存在的问题;而且该方法简单方便、计算量小、不依赖电机参数,又克服了无传感器方法所存在的弊端.实验表明该方法检测的电角度精度在之内,适合在对位置要求不是很高的直线伺服系统中使用。
 升级会员
升级会员 