利用骨架模型实现运动仿真解读.docx
《利用骨架模型实现运动仿真解读.docx》由会员分享,可在线阅读,更多相关《利用骨架模型实现运动仿真解读.docx(28页珍藏版)》请在冰豆网上搜索。
利用骨架模型实现运动仿真解读
利用骨架模型实现运动仿真
作者:
幽助 发布时间:
2013-07-10 浏览:
514
前面介绍了TOP-DOWN骨架模型,
本节为大家带来,利用骨架模型实现四连杆机构的运动仿真,
说明一下它的用处:
我们设计四连杆机构,如果连杆的长度不符合几何要求,运动将会失败,
所以设计时需要反复修改连杆长度,用传统的修改比较麻烦,
我们可以引入骨架模型,先用骨架模型实现运动仿真,如仿真有问题,
立马可以修改骨架,连杆再根据骨架来制作,如有改动立即再生模型即可。
该教程思路是网络学来的,由本人(幽助)制作,
首发沐风CAD,转载请保持其完整性,并注明出处!
谢谢!
下面开始教程,阅读说明:
图片在上,注释文字在下方。
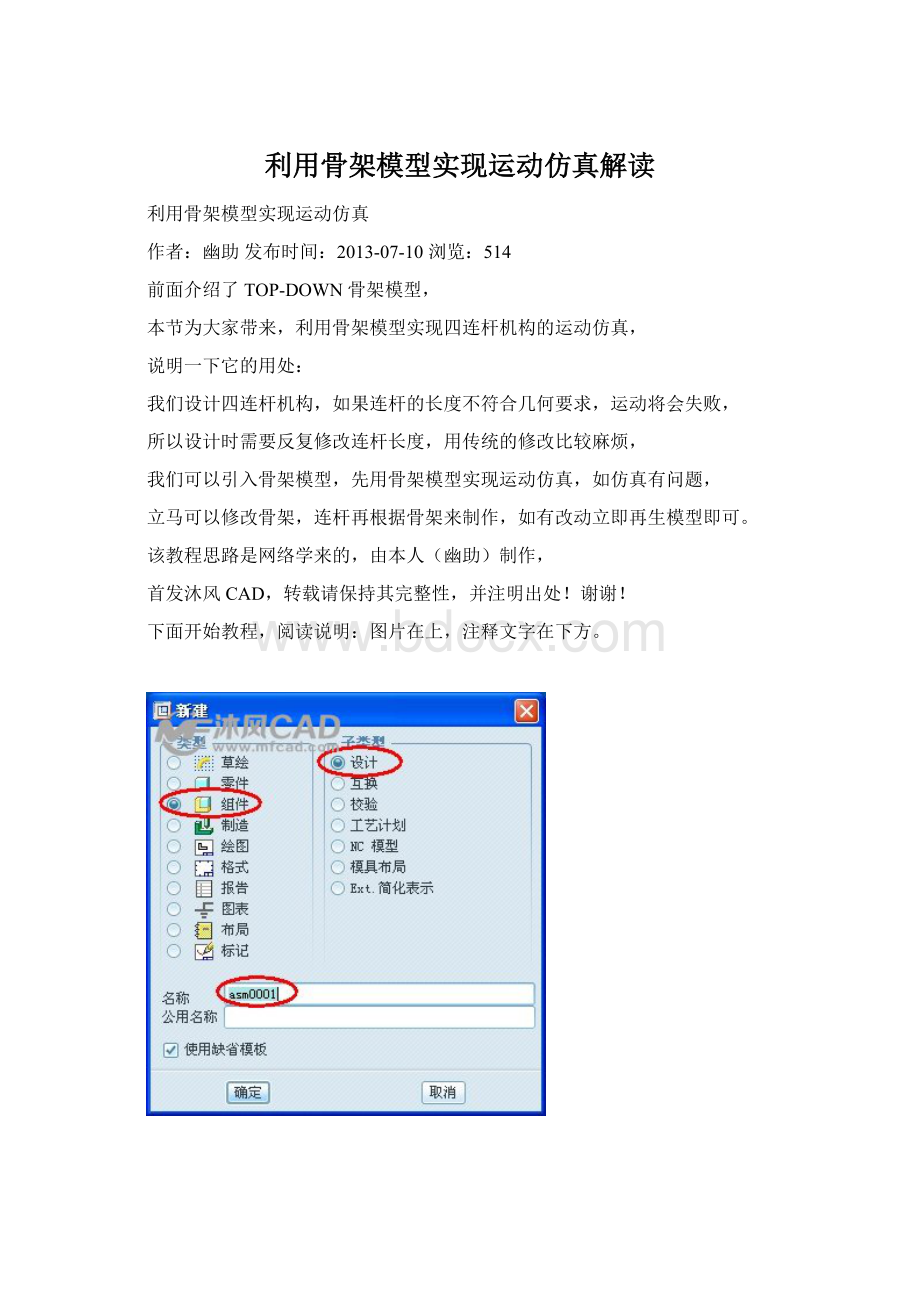
新建一个组件。
在组件里面再点【新建元件】。
创建骨架模型。
创建选项【复制现有】。
骨架模型创建后,单独打开它。
点击【工具】添加【参数】。
弹出对话框,点击“+”号,添加参数,输入任意字符,这里设为“d”
草绘曲线。
画如上图的草绘线。
点击【工具】,【关系】。
输入如上图的语句,旁边有解释。
确定的时候,提示错误,说明草绘图中有不合理的尺寸。
如上图,修改每条直线的尺寸,和一个角度尺寸。
如上图,修改角度尺寸,到125°多的时候出错,还需修改直线尺寸。
将右边的直线长度改为50.
尺寸已经合乎要求了。
完成草绘,不断的再生模型,即可看到骨架曲线的运动。
将骨架模型的几何发布出去。
每次出版一条直线,分四次发布。
由于后续我们需要做4根连杆,所以需要发布四次。
再新建【零件】。
【插入】-【共享数据】-【复制几何】。
如上图所示,打开前面创建的骨架模型。
设置放置坐标系。
【发布几何】,选择右边的任意一条线。
用同样的方法,将4个连杆都建立好,然后根据复制的几何,拉伸做出连杆。
此时拉连机构已经是符合运动条件的了,我们可以用销钉装配,进入机构分析验证结果。
点击【应用程序】-【机构】。
新建一个伺服电机。
选择如上图的销钉为运动轴。
如上图,定义伺服电机参数。
新建一个【分析定义】。
上图是运动分析结果,连杆运动没有问题,但此结果有点怪,不是我们想要的,
还需要修改连杆的长度。
如上图,进入骨架模型的草绘,修改右边的直线长度,改为60.
再生模型,连杆的长度将会自动更新。
再进行运动分,这才是我们想要的结构。
至此,教程已完结,欢迎指正!
 升级会员
升级会员 