交流伺服系统的相关系统参数和指标讲解学习.docx
《交流伺服系统的相关系统参数和指标讲解学习.docx》由会员分享,可在线阅读,更多相关《交流伺服系统的相关系统参数和指标讲解学习.docx(11页珍藏版)》请在冰豆网上搜索。
交流伺服系统的相关系统参数和指标讲解学习
伺服系统的参数调整和性能指标试验
1伺服系统的参数调整理论基础
伺服系统包括三个反馈回路(位置回路、速度回路以及电流回路)。
最内环回路的反应速度最快,中间环节的反应速度必须高于最外环。
假使未遵守此原则,将会造成震动或反应不良。
伺服驱动器的设计可确保电流回路具备良好的反应效能。
用户只需调整位置回路与速度回路增益。
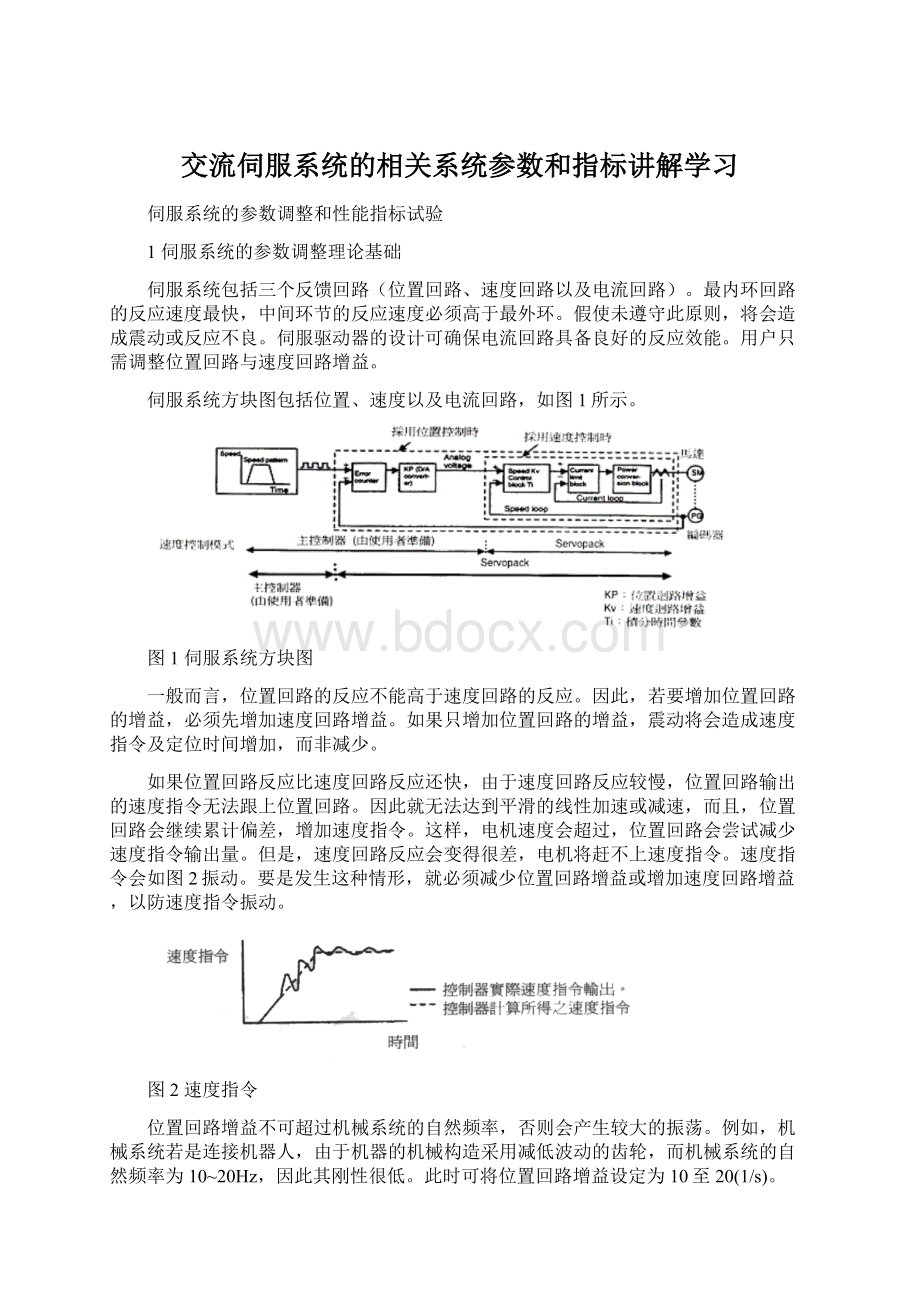
伺服系统方块图包括位置、速度以及电流回路,如图1所示。
图1伺服系统方块图
一般而言,位置回路的反应不能高于速度回路的反应。
因此,若要增加位置回路的增益,必须先增加速度回路增益。
如果只增加位置回路的增益,震动将会造成速度指令及定位时间增加,而非减少。
如果位置回路反应比速度回路反应还快,由于速度回路反应较慢,位置回路输出的速度指令无法跟上位置回路。
因此就无法达到平滑的线性加速或减速,而且,位置回路会继续累计偏差,增加速度指令。
这样,电机速度会超过,位置回路会尝试减少速度指令输出量。
但是,速度回路反应会变得很差,电机将赶不上速度指令。
速度指令会如图2振动。
要是发生这种情形,就必须减少位置回路增益或增加速度回路增益,以防速度指令振动。
图2速度指令
位置回路增益不可超过机械系统的自然频率,否则会产生较大的振荡。
例如,机械系统若是连接机器人,由于机器的机械构造采用减低波动的齿轮,而机械系统的自然频率为10~20Hz,因此其刚性很低。
此时可将位置回路增益设定为10至20(1/s)。
如果机械构造系统是晶片安装机、IC黏合机或高精度工具机械,系统的自然频率为70Hz以上。
因此,可将位置回路增益设定为70(1/s)或更高。
需要很快的反应时,不只是要确保采用的伺服系统(控制器、伺服驱动器、电机以及编码器)的反应,而且也必须确保机械系统具备高刚性。
1.1交流伺服系统相关参数的设定
速度回路增益主要用以决定速度回路的反应速度。
在机械系统不震动的前提下,参数设定的值愈大,反应速度就会增加。
如果负载惯量比设定的正确,速度回路增益的值就可以达到预想数值。
负载惯量比设定为以下的值。
负载惯量比设定值=电机轴转换负载惯性(JL)/伺服电机转子惯性(JM)*100(%)
速度回路积分时间参数:
速度回路具有积分元件,可以反应细微的输入。
此积分元件会延迟伺服系统的作业,因此,时间参数增加时,反应时间愈慢,所需的定位设定时间就愈长。
负载惯性很大,或者机械系统很可能出现震动时,回路积分时间参数必须足够大;否则机械系统将会震动。
以下就是参考标准。
Ti:
积分时间参数[s]
Kv:
速度回路增益(从上述计算)[HZ]
转矩指令滤波时间参数:
机械系统在某些情况下可能会出现转矩共振现象,产生尖锐声调的振动噪音。
增加转矩指令过滤时间参数可停止此振动。
但是此参数与积分时间参数一样,都会对系统造成延迟现象。
因此,不可将此参数的值设得太大。
位置回路增益:
伺服系统的反应由位置回路增益决定。
位置回路增益设定为较高的值时,反应速度会增加,缩短定位所需时间。
若是要将位置回路增益设定为高值,机械系统的刚性与自然频率也必须很高。
系统各参数之间总是相互制约的,如果只有位置回路增益增加,位置回路输出的指令可能会变得不稳定,以致整个伺服系统的反应可能会变得不稳定。
通常可参照下列步骤对系统进行调整:
a)将位置环增益即先设在较低值,然后在不产生异常响声和振动的前提下,逐渐增加速度环的增益至最大值。
b)逐渐降低速度环增益值,同时加大位置环增益。
在整个响应无超调、无振动的前提下,将位置环增益设至最大。
c)速度环积分时间常数取决于定位时间的长短,在机械系统不振动的前提下,尽量减小此值。
d)随后对位置环增益、速度环增益及积分时间常数进行微调,找到最佳值。
实际上现在数字伺服控制系统都实现了自动调整相关参数,但是在机器调试阶段中参考以上方法对系统的调试还是有一定的帮助。
1.2电流控制器增益的整定
为了提高伺服系统的抗干扰性能,通常要在速度环内加入电流反馈内环。
数字电流环一般包括A/D转换、坐标变换、电流调节器和PWM发生器几个部分。
实际电机电流变化较快,数字电流环因其离散性而存在固有的时间滞后,因此,作为内环的电流环应具有较小的采样周期才能获得好的电流调节性能。
而电流控制器的比例增益则是其中一个重要参数。
电流控制器参数的确定,必须考虑以下因素:
(1)由于电流控制存在相位延迟,因此,当输入三相正弦电流指令时,三相输出电流在相位上将产生一定的滞后,同时在幅值上也会有所下降,由于这两个原因,一方面破坏了电流矢量的解耦条件、另一方面降低了输出转矩。
为了克服这种影响,在对电流相位进行补偿的同时需要增大电流环的增益。
(2)由于电流检测器件的漂移误差会引起转速的波动,若提高电流控制器的增益,必然会放大漂移误差,对转速的控制精度产生不利的影响,故不能过大提高电流控制器的增益。
(3)为了保持电流环的稳定性,也不宜过于增加电流控制器的增益。
(4)电流环增益过大还会产生较大约转矩脉动和磁场噪音。
电流调节器的增益应满足下列条件:
上式中,
为PWM逆变器放大系数,
为PWM逆变器开关的延时时间,
为电流反馈滤波时间常数,
为电流反馈增益,
为电气时间常数。
在交流伺服系统中,电流环的控制是影响交流伺服系统控制性能的关键。
一般都要求电流环的控制有良好的快速性,并且输出电流纹波小,然而由于采用PWM控制方式时,为防止上、下桥臂直通短路而加入的导通延时将妨碍提高电流控制精度,且纹波电流大小取决于载波频率的上限,因此,采用高性能的电流检测器和提高PWM载波频率可作为提高电流控制环响应速度及提高闭环增益的有效措施。
但通常的交流伺服驱动产品中,电流环节相关参数在出厂时都设置好,避免用户自行调节。
典型的交流伺服系统电流控制环的频率特性如图3所示(采用GTR)。
图3电流控制环频率特性
1.3交流伺服系统速度控制特性及整定
速度控制是交流伺服系统中极为重要的一个环节,其控制性能是伺服性能的一个重要组成部分。
从广义上讲,速度伺服控制应具有高精度、快响应的特性具体而言,反映为小的速度脉功率、快的频率响应、宽的调速范围等性能指标。
一般应采用高分辨率、快响应且纹波小的速度检测器,采用高性能电流检测器和较高开关频率的大功率电力电子器件。
其性能指标主要有三点:
(1)频率响应为300Hz以上;
(2)速度控制范围为1:
1000以上;
(3)转速不均匀度小于6%。
高精度的交流伺服系统—般都要求高性能的电流控制,即提高电流控制响应速度和改善电流波形,以得到高精度的转矩控制性能。
因此,一方面需要减小三相永磁同步伺服电动机速度反电势的正弦波形畸变以改善电动机空间磁场的分布;另一方由要减小电流检测的漂移误差,并适当对该误差加以补偿。
同时,采用高开关频率的功率器件(如IGBT),提高电流的控制精度,减少引起转矩脉动的低次谐波电流分量,降低转速脉动。
转速反馈对转速脉动产生影响的两个因素,是转速采样时间引起的检测滞后和转速检测的分辨率。
其中若转速检测时间引起的滞后过大会恶化驱动系统的动态性能,易使伺服驱动系统在由高速切换到低速运行时产生振荡现象。
而转速检测的灵敏度对伺服驱动系统在稳态运行的平稳性有着至关重要的作用。
如果增大速度控制器比例增益,则能降低转速脉动的变化量,提高伺服驱动系统的硬度,保证系统稳态及瞬态运行时的性能。
但是在实际系统中,速度控制器比例增益不能过大,否则将引起整个伺服驱动系统振荡。
因此,当负载对象的转动惯量与电动机的转动惯量之比增大以及负载的摩擦转矩增大时,宜增大比例增益和积分增益,即增大积分时间常数。
以满足稳定性的要求。
而当负载对象的转功惯量与电动机的转动惯量之比减小以及负载的摩擦转矩减小时宜减小积分时间常数和比例增益,保证低速运行时的速度控制精度。
1.4交流伺服系统位置控制特性及整定
作为进给驱动用的交流伺服系统,在性能上有两方面的要求:
一方面要有稳定平滑的瞬态响应;另一方面稳态位置跟踪误差和动态位置跟踪误差要小,以获得高精度的位置控制性能。
交流伺服系统位置控制的主要性能指标:
(1)位置环增益,位置环增益是交流伺服系统的基本指标之一,它与伺服电机以及机械负载有着密切的联系。
通常伺服系统的位置环增益越高,位置跟踪误差愈小,但在输入进给速度突变时,其输出变化剧烈,机械负载要承受较大的冲击。
因此,必须设置自动升降速软件处理或用编程措施来缓冲这种变化。
当伺服系统位置环增益相对较小时,调整起来比较方便,因为位置环增益小,侗服系统容易稳定,对大负载对象,调整要简单些。
同时,低位置环增益的伺服系统频带较窄,对噪音不敏感。
因此,作为伺服进给用时,位置的微观变化小,但低位置环增益的伺服系统位置跟踪误差较大,进行轮廓加工时,会在轨迹上形成加工误差。
(2)动态位置跟踪误差。
位置伺服系统的稳态位置跟踪误差可表示为稳态速度跟踪误差的形式:
由上可知,提高位置环增益和截止频率是减少位置伺服系统位置跟踪误差的重要手段。
典型情况下,交流位置伺服系统的位置环增益Kp在5~150之间,截止频率为20~50Hz范围。
2系统动态性能测试
实验在PC机下完成,配合上位软件为平台,以伺服测试软件作为实验波形测量的主要工具。
实验过程如下:
位置控制模式下伺服调整的一般步骤:
(1)调整位置环增益到一个恰当的值。
(2)逐渐增加速度环增益至机器不产生异常响声或震动。
(3)逐渐增加位置环增益至机器不产生振动。
(4)根据定位完成时间降低速度环积分时间常数。
2.1阶跃响应部分(系统的响应性能)
2.1.1阶跃给定信号的产生(让机器Y轴走直线)
速度倍率100%(这时电机实际速度约1250rpm)
MF速度设为200mm/sec,ML速度设为100mm/sec
加速度设为1000mm/sec2
设定采样时间为2000ms
PulseReferenceSpeed:
Max1500,Min–1500
FeedbackSpeed:
Max1500,Min-1500
2.1.2测量数据及分析
1、参考标准情况下的波形图
位置环增益130(1/s)速度环增益227Hz速度环积分时间10ms
该参数是在自动增益调整情况下获得的,较为合适。
在本文中该曲线被用来作为其他曲线好坏的参考依据。
曲线中电机速度紧跟位置指令,无速度超调,且定位时间极短。
2、速度环积分过低的情况
位置环增益130(1/s)速度环增益227Hz速度环积分时间4ms
伺服控制器的速度回路必须具有快速的反应性。
图中速度曲线出现了波动,表明由于速度回路积分时间太短,破坏了速度回路的稳定性,造成伺服电机速度的波动,运行极不平稳。
3、速度环积分较高
位置环增益130(1/s)速度环增益227HZ速度环积分时间100ms
本曲线与标准曲线相比差异不太明显。
速度环积分对速度跟踪位置指令的影响不是很大,但过大的速度环积分时间会延迟速度回路的反应时间。
4、速度环增益较高
位置环增益130(1/s)速度环增益280HZ速度环积分时间10ms
本曲线中电机速度出现波动,与速度环积分时间太小的影响一样,两者必须保持协调。
增大速度环增益的同时应该增加速度环积分时间,否则伺服系统会振荡。
5、速度环增益太低
位置环增益130(1/s)速度环增益30HZ速度环积分时间10ms
正如上面的分析一样,速度环增益的降低会导致电机速度出现波动。
比较速度增益过高的情形可知,本曲线中电机速度的波动频率更低,这充分表明了速度环增益的提高使系统的工作频率得到了提高,控制系统的快速响应性能好,能更有效地克服干扰作用的影响。
6、位置增益过低
位置环增益50(1/s)速度环增益227HZ速度环积分时间10ms
在伺服系统中,位置回路的工
 升级会员
升级会员 