过程控制实验6 7 8说课材料.docx
《过程控制实验6 7 8说课材料.docx》由会员分享,可在线阅读,更多相关《过程控制实验6 7 8说课材料.docx(12页珍藏版)》请在冰豆网上搜索。
过程控制实验678说课材料
过程控制实验678
实验六、单容水箱液位PID控制系统
一、实验目的
1、通过实验熟悉单回路反馈控制系统的组成和工作原理。
2、研究系统分别用P、PI和PID调节器时的阶跃响应。
3、研究系统分别用P、PI和PID调节器时的抗扰动作用。
4、定性地分析P、PI和PID调节器的参数变化对系统性能的影响。
二、实验设备
1、THKGK-1型过程控制实验装置:
GK-02、GK-03、GK-04、GK-07(2台)
2、万用表一只
3、计算机系统
三、实验原理
1、单容水箱液位控制系统
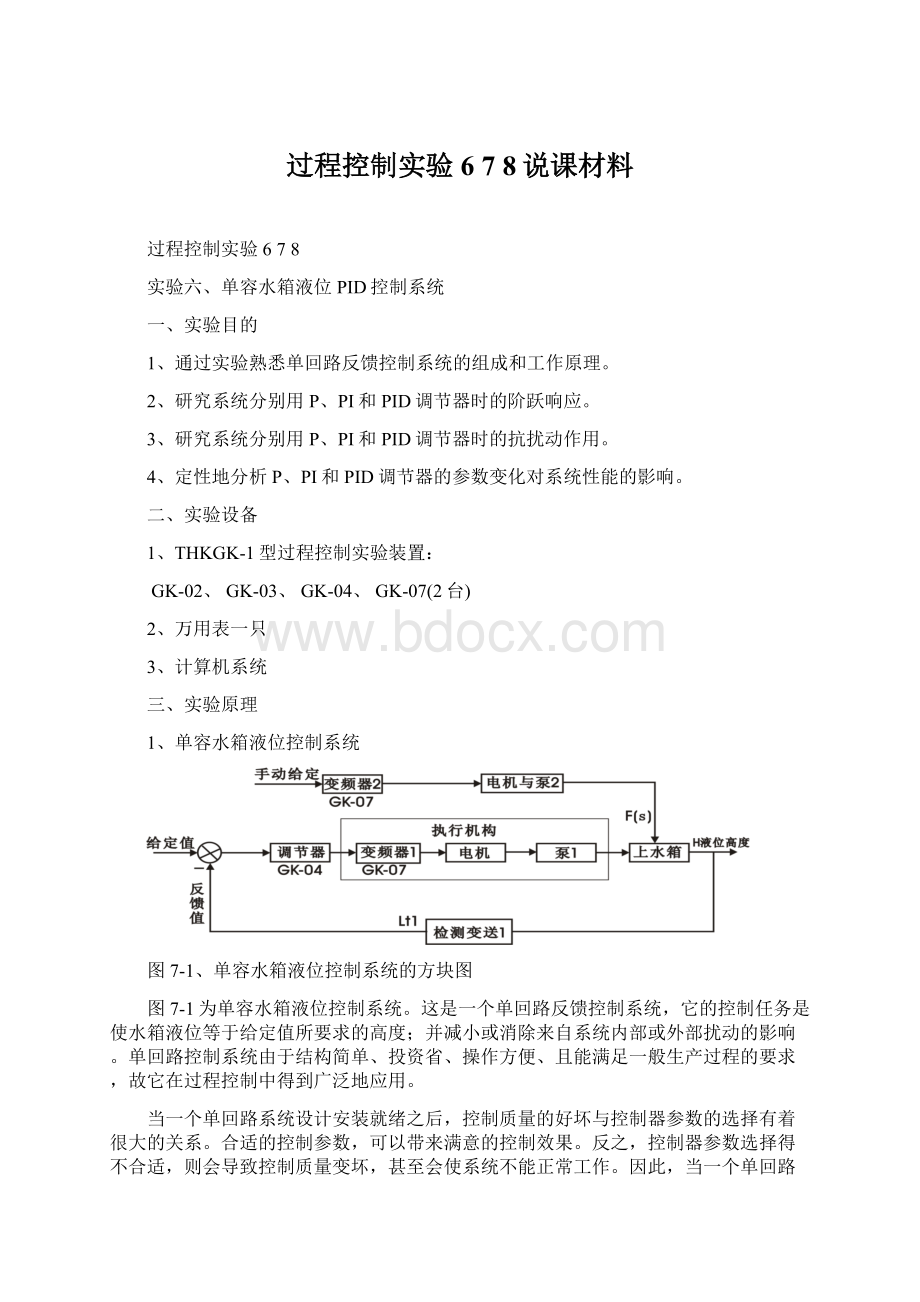
图7-1、单容水箱液位控制系统的方块图
图7-1为单容水箱液位控制系统。
这是一个单回路反馈控制系统,它的控制任务是使水箱液位等于给定值所要求的高度;并减小或消除来自系统内部或外部扰动的影响。
单回路控制系统由于结构简单、投资省、操作方便、且能满足一般生产过程的要求,故它在过程控制中得到广泛地应用。
当一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数的选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之,控制器参数选择得不合适,则会导致控制质量变坏,甚至会使系统不能正常工作。
因此,当一个单回路系统组成以后,如何整定好控制器的参数是一个很重要的实际问题。
一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作。
图7-2单容液位控制系统结构图
系统由原来的手动操作切换到自动操作时,必须为无扰动,这就要求调节器的输出量能及时地跟踪手动的输出值,并且在切换时应使测量值与给定值无偏差存在。
一般言之,具有比例(P)调节器的系统是一个有差系统,比例度δ的大小不仅会影响到余差的大小,而且也与系统的动态性能密切相关。
比例积分(PI)调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数δ,Ti选择合理,也能使系统具有良好的动态性能。
比例积分微分(PID)调节器是在PI调节器的基础上再引入微分D的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。
在单位阶跃作用下,P、PI、PID调节系统的阶跃响应分别如图7-3中的曲线①、②、③所示。
图7-3、P、PI和PID调节的阶跃响应曲线
四、验内容与步骤
1、比例(P)调节器控制
1)、按图7-1所示,将系统接成单回路反馈系统(接线参照实验一)。
其中被控对象是上水箱,被控制量是该水箱的液位高度h1。
2)、启动工艺流程并开启相关的仪器,调整传感器输出的零点与增益。
3)、在老师的指导下,接通单片机控制屏,并启动计算机监控系统,为记录过渡过程曲线作好准备。
4)、在开环状态下,利用调节器的手动操作开关把被控制量“手动”调到等于给定值(一般把液位高度控制在水箱高度的50%点处)。
5)、观察计算机显示屏上的曲线,待被调参数基本达到给定值后,即可将调节器切换到纯比例自动工作状态(积分时间常数设置于最大,积分、微分作用的开关都处于“关”的位置,比例度设置于某一中间值,“正-反”开关拔到“反”的位置,调节器的“手动”开关拨到“自动”位置),让系统投入闭环运行。
6)、待系统稳定后,对系统加扰动信号(在纯比例的基础上加扰动,一般可通过改变设定值实现)。
记录曲线在经过几次波动稳定下来后,系统有稳态误差,并记录余差大小。
7)、减小δ,重复步骤6,观察过渡过程曲线,并记录余差大小。
8)、增大δ,重复步骤6,观察过渡过程曲线,并记录余差大小。
9)、选择合适的δ值就可以得到比较满意的过程控制曲线。
10)、注意:
每当做完一次试验后,必须待系统稳定后再做另一次试验。
2、比例积分调节器(PI)控制
1)、在比例调节实验的基础上,加入积分作用(即把积分器“I”由最大处“关”旋至中间某一位置,并把积分开关置于“开”的位置),观察被控制量是否能回到设定值,以验证在PI控制下,系统对阶跃扰动无余差存在。
2)、固定比例度δ值(中等大小),改变PI调节器的积分时间常数值Ti,然后观察加阶跃扰动后被调量的输出波形,并记录不同Ti值时的超调量σp。
表二、δ值不变、不同Ti时的超调量σp
积分时间常数Ti
大
中
小
超调量σp
3)、固定积分时间Ti于某一中间值,然后改变δ的大小,观察加扰动后被调量输出的动态波形,并列表记录不同δ值下的超调量σp。
表三、Ti值不变、不同δ值下的σp
比例度δ
大
中
小
超调量σp
4)、选择合适的δ和Ti值,使系统对阶跃输入扰动的输出响应为一条较满意的过渡过程曲线。
此曲线可通过改变设定值(如设定值由50%变为60%)来获得。
3、比例积分微分调节(PID)控制
1)、在PI调节器控制实验的基础上,再引入适量的微分作用,即把D打开。
然后加上与前面实验幅值完全相等的扰动,记录系统被控制量响应的动态曲线,并与实验步骤
(二)所得的曲线相比较,由此可看到微分D对系统性能的影响。
2)、选择合适的δ、Ti和Td,使系统的输出响应为一条较满意的过渡过程曲线(阶跃输入可由给定值从50%突变至60%来实现)。
3)、用计算机记录实验时所有的过渡过程实时曲线,并进行分析。
五、注意事项
1、实验线路接好后,必须经指导老师检查认可后才能接通电源。
2、必须在老师的指导下,启动计算机系统和单片机控制屏。
3、若参数设置不当,可能导致系统失控,不能达到设定值。
六、实验报告要求
1、绘制单容水箱液位控制系统的方块图。
2、用接好线路的单回路系统进行投运练习,并叙述无扰动切换的方法。
3、P调节时,作出不同δ值下的阶跃响应曲线。
4、PI调节时,分别作出Ti不变、不同δ值时的阶跃响应曲线和δ不变、不同Ti值时的阶跃响应曲线。
5、画出PID控制时的阶跃响应曲线,并分析微分D的作用。
6、比较P、PI和PID三种调节器对系统余差和动态性能的影响。
实验七、双容水箱液位PID控制系统
一、实验目的
1、熟悉单回路双容液位控制系统的组成和工作原理。
2、研究分别用P、PI和PID调节器时系统的动态性能。
3、定性地分析P、PI和PID调节器的参数变化对系统性能的影响。
4、掌握临界比例度法整定调节器的参数。
5、掌握4:
1衰减曲线法整定调节器的参数。
二、实验设备
1、THKGK-1型过程控制实验装置:
GK-02、GK-03、GK-04、GK-07(2台)
2、万用表一只
3、计算机系统
三、实验原理
图8-1、双容水箱液位控制系统的方框图
图8-1为双容水箱液位控制系统。
这是一个单回路控制系统,它与实验六不同的是有两个水箱相串联,控制的目的既要使下水箱的液位高度等于给定值所期望的值,又要具有减少或消除来自系统内部或外部扰动的影响。
显然,这种反馈控制系统的性能主要取决于调节器GK-04的结构和参数的合理选择。
由于双容水箱的数学模型是二阶的,故它的稳定性不如单容液位控制系统。
对于阶跃输入(包括阶跃扰动),这种系统用比例(P)调节器去控制,系统有余差,且与比例度近似成正比,若用比例积分(PI)调节器去控制,不仅可实现无余差,而且只要调节器的参数δ和Ti选择得合理,也能使系统具有良好的动态性能。
图8-2、双容水箱液位控制结构图
比例积分微分(PID)调节器是在PI调节器的基础上再引入微分D的控制作用,从而使系统既无余差存在,又使其动态性能得到进一步改善。
四、实验内容与步骤
1、比例(P)调节器控制
1)、按图8-1所示,将系统接成单回路反馈控制系统(接线参照实验一)。
其中被控对象是下水箱,被控制量是下水箱的液位高度h2。
2)、启动工艺流程并开启相关的仪器,调整传感器输出的零点与增益。
3)、在老师的指导下,接通单片机控制屏,并启动计算机监控系统,为记录过渡过程曲线作好准备。
4)、在开环状态下,利用调节器的手动操作开关把被控制量调到等于给定值(一般把液位高度控制在水箱高度的50%点处)。
5)、观察计算机显示屏上的曲线,待被调参数基本达到给定值后,即可将调节器切换到纯比例自动工作状态(积分时间常数设置于最大,积分、微分作用的开关都处于“关”的位置,比例度设置于某一中间值,“正-反”开关拔到“反”的位置,调节器的“手动”开关拨到“自动”位置),让系统投入闭环运行。
6)、待系统稳定后,对系统加扰动信号(在纯比例的基础上加扰动,一般可通过改变设定值实现)。
记录曲线在经过几次波动稳定下来后,系统有稳态误差,并记录余差大小。
7)、减小δ,重复步骤6,观察过渡过程曲线,并记录余差大小。
8)、增大δ,重复步骤6,观察过渡过程曲线,并记录余差大小。
9)、选择合适的δ值就可以得到比较满意的过程控制曲线。
10)、注意:
每当做完一次试验后,必须待系统稳定后再做另一次试验。
表一、不同δ时的超调量σp
比例度δ
大
中
小
超调量σp
2、比例积分调节器(PI)控制
1)、在比例调节实验的基础上,加入积分作用(即把积分器“I”由最大处旋至中间某一位置,并把积分开关置于“开”的位置),观察被控制量是否能回到设定值,以验证在PI控制下,系统对阶跃扰动无余差存在。
2)、固定比例度δ值(中等大小),改变PI调节器的积分时间常数值Ti,然后观察加阶跃扰动后被调量的输出波形,并记录不同Ti值时的超调量σp。
表二、δ值不变、不同Ti时的超调量σp
积分时间常数Ti
大
中
小
超调量σp
3)、固定积分时间Ti于某一中间值,然后改变δ的大小,观察加扰动后被调量输出的动态波形,并列表记录不同δ值下的超调量σp。
表三、Ti值不变、不同δ值下的σp
比例度δ
大
中
小
超调量σp
4)、选择合适的δ和Ti值,使系统对阶跃输入扰动的输出响应为一条较满意的过渡过程曲线。
此曲线可通过增大设定值(如设定值由50%变为60%)来获得。
3、比例积分微分调节器(PID)控制
1)、在PI调节器控制实验的基础上,再引入适量的微分作用,即把D打开。
然后加上与前面实验幅值完全相等的扰动,记录系统被控制量响应的动态曲线,并与实验步骤
(二)所得的曲线相比较,由此可看到微分D对系统性能的影响。
2)、选择合适的δ、Ti和Td,使系统的输出响应为一条较满意的过渡过程曲线(阶跃输入可由给定值从50%突变至60%来实现)。
3)、用秒表和显示仪表记录一条较满意的过渡过程实时曲线。
4、用临界比例度法整定调节器的参数
在实际应用中,高阶系统PID调节器的参数常用下述临界比例度法来确定。
用临界比例度法去整定PID调节器的参数既方便又实用。
它的具体做法是:
1)、待系统稳定后,将调节器置于纯比例P控制。
逐步减小调节器的比例度δ,并且每当减小一次比例度δ,待被调量回复到平衡状态后,再手动给系统施加一个5%~15%的阶跃扰动,观察被调量变化的动态过程。
若被调量为衰减的振荡曲线,则应继续减小比例度δ,直到输出响应曲线呈现等幅振荡为止。
如果响应曲线出现发散振荡,则表示比例度调节得过小,应适当增大,使之出现如图8-4所示的等幅振荡。
图8-3为它的实验方块图。
图8-3、具有比例调节器的闭环系统
2)、在图8-3所示的系统中,当被调量作等幅振荡时,此时的比例度δ就是临界比例度,用δk表示之,相应的振荡周期就是临界周期Tk。
据此,按下表所列出的经验数据确定PID调节器的三个参数δ、Ti和Td。
图8-4、具有周期TK的等幅振荡
表四、用临界比例度δk整定PID调节器的参数
调节器参数
调节器名称
δk
Ti(S)
Td(S)
P
2δk
PI
2.2δk
Tk/1.2
PID
1.6δk
0.5Tk
0.125Tk
3)、必须指出,表格中给出的参数值是对调节器参数的一个初略设计,因为它是根据大量实验而得出的结论。
若要获得更满意的动态过程(例如:
在阶跃作用下,被调参量作4:
1地衰减振荡),则要在表格给出参数的基础上,对δ、Ti(或Td)作适当调整。
5、用衰减曲线法整定调节器的参数:
与临界比例度法类似,不同的是本方法先根据由实验所得的阻尼振荡衰减曲线(为4:
1),求得相应的比例度δs和曲线的振荡周期Ts,然后按表五给出的经验公式,确定调节器的相关参数。
获得系统的输出响应曲线按4:
1衰减的具体步骤如下:
1)、置调节器积分时间Ti到最大值(Ti=∞),微分时间Td为零(Td=0),比例度δ为较大值,让系统投入闭环运行。
2)、待系统稳定后,作设定值阶跃扰动,并观察系统的响应。
若系统响应衰减太快,则增大比例度;反之,系统响应衰减过慢,应减小比例度。
如此反复直到系统出现如图8-5所示4:
1的衰减振荡过程。
图8-5、4:
1衰减响应曲线
记下此时的比例度δs和振荡周期Ts的数值。
3)、利用δs和Ts值,按表五给出的经验公式,求调节器参数δ、Ti和Td数值。
表五4:
1衰减曲线法整定计算公式
调节器参数
调节器名称
δ
Ti
Td
P
δs
PI
1.2δs
0.5Ts
PID
0.8δs
0.3Ts
0.1Ts
五、注意事项
1、实验线路接好后,必须经指导老师检查认可后方可接通电源。
2、水泵启动前,出水阀门应关闭,待水泵启动后,再逐渐开启出水阀,直至某一适当开度。
3、在老师的指导下,开启单片机控制屏和计算机系统。
六、实验报告要求
1、画出双容水箱液位控制实验系统的结构图。
2、按图8-2要求接好实验线路,经老师检查无误后投入运行。
3、用临界比例度法和衰减曲线法分别计算P、PI、PID调节的参数,并分别列出系统在这三种方式下的余差和超调量。
4、作出P调节器控制时,不同δ值下的阶跃响应曲线。
5、作出PI调节器控制时,不同δ和Ti值时的阶跃响应曲线。
6、画出PID控制时的阶跃响应曲线,并分析微分D对系统性能的影响。
7、综合评价P、PI、和PID三种调节器对系统性能的影响。
实验八、水箱压力PID控制系统
一、实验目的
1、了解压力传感器的结构原理及使用方法。
2、研究单回路压力PID控制系统。
3、掌握手动/自动无扰动切换的方法。
4、学会用反应曲线法对PID参数进行整定。
二、实验装置
1、THKGK-1型过程控制实验装置:
GK-02、GK-03GK-04、GK-07(2台)
2、计算机及监控软件
三、实验原理
1、压力传感器变送原理简介
此压力变送器的敏感核心采用了高性能的硅压阻式压力充油芯体,内部的专用集成电路将传感器毫伏信号转换成标准远距离的传输电流或电压信号,可以直接与计算机接口卡、控制仪表、智能仪表或PLC等方便连接,该系列产品广泛应用于工业过程控制、石油、化工、冶金等行业。
2、单回路压力控制系统方框图
图10-1、单回路压力控制系统
图10-2、单回路压力控制系统结构图
单回路压力控制系统如图10-1所示。
系统如要实现无扰动地由手动操作切换到自动运行,则要求调节器能自动地跟踪手动输出,且要在切换时使测量值与给定值无偏差存在。
改变PID调节器参数δ、Ti和Td都会影响系统的动态特性。
整定调节器参数通常有临界比例度法、衰减振荡法。
由于本系统的被控对象是一阶惯性环节、且时间滞后很小,所以很难产生振荡曲线,因此我们在这里采用反应曲线法来整定系统的参数。
四、实验内容与步骤
1、按图10-1所示,将系统接成单回路反馈系统(接线参照实验一)。
其中被控对象是上水箱,被控制量是上水箱的液体压力。
2、启动工艺流程并开启相关的仪器,调整传感器输出的零点与增益(参考第一部分)。
3、在老师的指导下,接通单片机控制屏,并启动计算机监控系统,为记录过渡过程曲线作好准备。
4、在开环状态下,利用调节器的手动操作开关把被控制量“手动”调到等于给定值(一般把液位高度控制在水箱高度的50%点处)。
5、反复调节手动输出值,使给定值与反馈值基本上保持相等且稳定后,把手动开关拨到自动,实现无扰动切换。
6、用反应曲线法整定系统参数:
1)将调节器置于手动状态,并使调
节器输出一个阶跃信号,记录被控制量压
力的响应曲线如图10-3所示。
由该图可确
定て、T和K,其中K按下式确定
K=y(∞)-y(0)/X0(式中X0为给定值)
图10-3、阶跃响应曲线
根据所求的K、T和て,利用下表所示的经验公式,就可计算出对应于衰减率为4:
1时调节器的相关参数。
反应曲线法整定计算公式
调节器参数
控制规律
δ(%)
Ti
Td
P
Kて/T
PI
1.1Kて/T
3.3て
PID
0.85Kて/T
2て
0.5て
五、注意事项
在老师的指导下接入单片机控制屏并启动计算机监控系统。
六、实验报告要求
1、写出常规的实验报告内容。
2、叙述无扰动切换的方法。
 升级会员
升级会员 