自动打标机.docx
《自动打标机.docx》由会员分享,可在线阅读,更多相关《自动打标机.docx(7页珍藏版)》请在冰豆网上搜索。
自动打标机
一、设计任务及要求··········································1
1.设计任务················································1
2.原始数据及设计要求······································1
二、设计方案················································2
1.功能及工艺动作过程分析·································2
2.执行机构型式设计的原则·································2
3.机构的选型·············································3
三、机构运动简图············································4
四、机构工作原理说明········································6
五、有关参数的相关计算······································8
六、结论与讨论··············································8
一、设计任务及要求:
1.设计任务
(1)
(2)
自动打标机
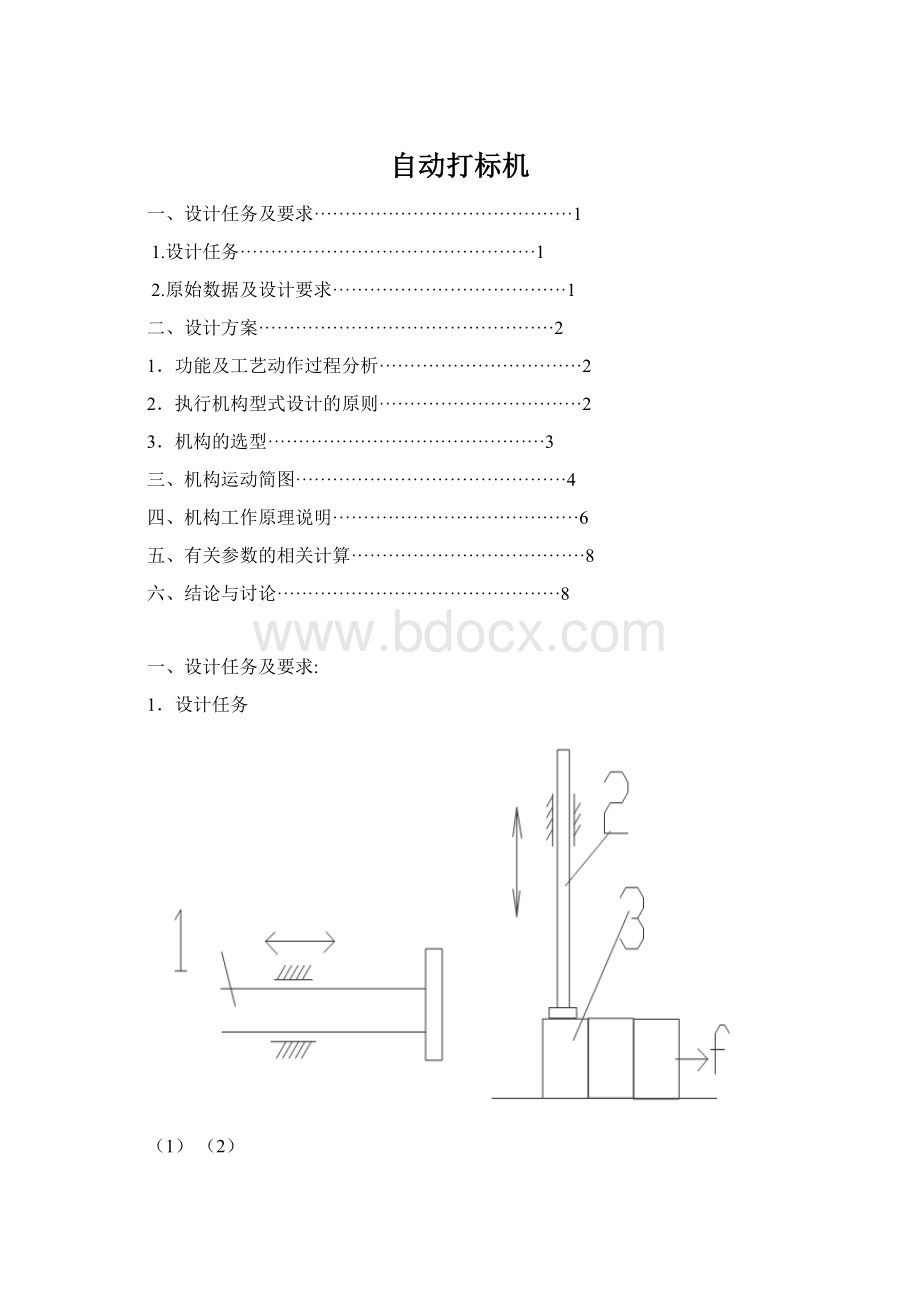
实现在产品表面自动打制印章的要求。
产品由运送带运送到推头1的前端(如图1所示),然后由推送机构将产品3推送到打印头2的下部,此后打印头2向下运动,与产品上表面接触,完成打印操作。
在打印头退回原位时,推送机构再推送另一产品,并把打印好的推走。
2.原始数据及设计要求
产品尺寸为:
长X宽X高=200mmx200mmx100mm,生产率为10件/min。
要求打印机头在与产品接触时,有一秒的停歇时间以保证在产品上形成清晰的印字。
设打印机头在打印过程中对产品的压力为500吨。
二、设计方案
1.功能及工艺动作过程分析
为了实现打印机头的上下打标运动功能和在打标面上停留一秒的功能,可由齿轮、连杆来引起打印机头的上下移动和停留,不完全齿轮与齿轮间的运动能实现打印机头在其运动路线最高处停留三秒的功能。
工艺动作过程如下:
(1)打印机头的竖直下降打标。
在工作时,需要打印机头竖直下降,以完成打标的任务,可以采用连杆机构、曲柄滑块机构、双滑块机构、定块机构等来实现。
(2)打印机头的竖直上升功能。
在工作时,需要打印机头竖直上升,以完成退回的任务,同样可以采用连杆机构、曲柄滑块机构、双滑块机构、定块机构等来实现。
(3)打印机头在工件上的停留。
在工作过程中,打印机头需要在工件上停留一秒钟,以保证在产品上形成清晰的印字。
可以采用连杆机构、凸轮机构等机构来实现。
(4)打印机头最高处的停留。
在构件工作工程中,打印机头需要上升到最高处时停留三秒钟,以保证推件完成,这个可以采用凸轮机构、不完全齿轮与齿轮的啮合来实现停留三秒钟。
综上所述,可以选择连杆机构和齿轮与不完全齿轮的啮合来实现以上的要求。
2.执行机构型式设计的原则
(1)满足执行机构的工艺动作和运动要求
(2)尽量简化和缩短运动链,选择较简单的机构
(3)尽量减小机构尺寸
(4)选择合理的运动副形式
(5)考虑动力源的形式
(6)使执行机构具有良好的传动条件和动力特性
(7)使机械具有调节某些运动参数的能力
(8)保证机械的安全运转
3.机构的选型
该打印机的总体运动可以分为打印机构和推送机构。
打印机构:
推送机构:
机构的构型:
三、机构运动简图
自动打标机运动简图
1、2、3为同一构件,其中1为主动轮,2、3与后面的4、9为皮带轮,4、5为同一构件,其中5为不完全齿轮,6为标准齿轮,两齿轮的齿数相同,模数相同,压力角α相同,且均为20°,构件7、8、10、11均为连杆,其中连杆7具有一定的弹性,12为机架,13、14为皮带。
构件1、4、6、9分别与机架间是转动副,为低副,2、3、4、9分别与皮带间是转动副,为低副,5与6齿轮啮合,为高副,6与7、7与8、9与10、10与11间均为转动副,为低副,8与12、11与12间为移动副。
综上所述,该机构一共有10个运动构件,14个低副,1个高副。
故该机构的自由度为:
F=3n-(2pl+ph)=3×10-14×2-1×1=1
四、机构工作原理说明
自动打标机示意图
注:
5为不完全齿轮,6为标准齿轮,其他轮为皮带轮。
主动轮1转动,皮带轮2、3轮随着1轮转动,再通过皮带13、14分别带动皮带轮4与9的转动,皮带轮9带动连杆10运动,连杆11随着连杆10运动,来回移动推着产品至打印机头的正下方。
同时不完全齿轮5和皮带轮4一起运动,不完全齿轮5与齿轮6啮合,使齿轮6转动,连杆7在齿轮6的作用下运动,带着装有打印机头的连杆8运动,使连杆8沿着机架上下运动,从而能够使打印机头作用在产品上,完成打标的任务。
如上图所示为自动打标示意图,点a为连杆10与皮带轮9相连接处,点b为连杆7与齿轮6的连接处,半圆ced部分为不完全齿轮5带齿部分,另一半没有齿,c、d两点为齿的边缘处。
主动轮1开始转动,假设运动方向如上图所示:
⑴当a点处运动到皮带轮的最左端时,连杆11正要向推着产品前进的方向运动,此时不完全齿轮5的齿边缘d、c分别位于不完全齿轮5的最左端和最右端,半圆ced部分位于上方,不完全齿轮5刚好与齿轮6啮合完毕,下一时刻齿轮6停止运动,b点位于齿轮6的最上端,此时连杆7与连杆8在竖直方向上,且连杆8位于其运动路线的最高端。
⑵下一时刻齿轮6、连杆7与连杆8将一起停留3s,在这3s内,不完全齿轮5仍然随着皮带轮4运动,靠近齿轮6那端的不完全齿轮5部分为无齿部分,此时两齿轮间处于空挡,同时连杆11推着产品向打印机头正下方运动。
⑶当到第3s时,产品刚好被推送到打印机头正下方,a点处于其运动路线的最右段,连杆10与连杆11处于一条水平线上,此时不完全齿轮5的齿边缘c、d分别位于不完全齿轮5的最左端和最右端,半圆ced部分位于下方,不完全齿轮5刚好与齿轮6开始啮合。
⑷在下一时刻,连杆11将随着连杆10运动而开始返程,经过3s,a点又运动到最左端,准备进入下一个周期的运动,而在这3s内,齿轮6将在不完全齿轮5的啮合作用下转动,从而带动连杆7的运动,连杆8将在连杆7运动的作用下,开始向下运动,到达最低端后,再向上运动,直到达到其运动路线的最高端。
在此期间,当齿轮6从开始转动至120º处(1/3圆周),连杆8的底端刚好与产品的上表面接触,等到齿轮6再次运动120º时,连杆8的底端刚好与产品的上表面离开,此时连杆8的底端面与产品的上表面接触时间为1s,再经过1s时间运动120º,连杆7与连杆8在竖直方向上,且连杆8位于其运动路线的最高端。
此时又开始进入下一周期运动,整个机构做周期性运动。
五、有关参数的相关计算
主动轮1的转速n1=10r/min,n2=n3=n4=n5=n9=10r/min,对齿轮整周传动而言,不论两齿轮的齿形如何,其平均传动比总等于齿数的反比,即不完全齿轮5与标准齿轮6的平均传动比为i56=n5/n6=z6/z5=1,即n5=n6=10r/min,两齿轮模数都为4,压力角和模数均取标准值:
α=20,m=4。
各个轮的半径分别为:
R1=400mm,R2=R3=R4=200mm,R5=600mm,并且R6=300mm,连杆7与齿轮6的偏心距为e1=200mm,连杆7的长度l7=300mm,
l8=555mm。
皮带轮9的中心与产品下表面的接触面在同一平面上,齿轮6与皮
带轮9的水平距离为1500mm,竖直距离为1000mm,产品高度为100mm,这样,保证了当b点由最高处运动120º时,连杆8刚好与产品接触。
连杆10与齿轮9的偏心距为e2=150mm,连杆10的长度l10=600mm,l11=750mm。
1轮中心距离产品下表面所在平面为900mm,距离打印机头的正下方的水平距离为700mm,两齿轮中心在同一水平面上。
六、结论与讨论
此设计能实现在产品表面自动打制印章的要求。
产品由运送带运送到推头的前端后,由推送机构将产品推送到打印机头的正下方,此后打印机头向下运动,与产品上表面接触,完成打印操作。
在打印机头退回原位时,推送机构再推送另一产品,并把打印好的产品推走。
当齿轮6从开始转动至120º处(1/3圆周),连杆8的底端刚好与产品的上表面接触,等到齿轮6再次运动120º时,连杆8的底端刚好与产品的上表面离开,此时连杆8的底端面与产品的上表面接触时间为1s。
在这1s时间内,连杆8一直处于被压状态,连杆7绕着与连杆8接触处作转动,此时连杆7一直处于被压缩状态,若连杆7刚性太强,则容易在被挤压时折断,故连杆7要有一定的弹性,且在压缩时表现一定的弹性,受拉恢复至原长时,不再继续表现弹性而伸长,保持原长运动。
因此连杆7的弹性要求是一个小缺点,还有一个就是标准齿轮6与不完全齿轮5啮合时有点缺点。
不完全齿轮机构的结构简单,制造容易,工作可靠,但是运动时有较大冲击,只适宜用于低速、轻载场合。
不过在此设计中,其转速均为10r/min,能够使用。
设计中要求主动轮的转速为10r/min,不知道市场上有没有这种电动机销售。
产品被推着刚运动至打印机头的正下方时,会有一定的速度,这就要求及接触面的摩擦大些,使产品不会继续向前运动,直接静止下来。
在这次课程设计中,我学到了很多东西。
我感觉想起来很简单,但自己动手做时就感觉有点难,尤其是将用动方案转化为机构设计。
在课程设计中,一直都是和计算机紧密结合在一起。
看来今后真的是计算机的时代,不懂计算机的不行。
尤其是对CAD制图,还不熟练,后来在自己的摸索中完成了。
通过这次设计,我对机械运动原理有了更深一步的了解,机械设计不仅要满足运动轨迹,还要考虑受力程度和工作行程,这些使我感受很深。
在这次课程设计中,我既学到了知识,又培养了一点创新设计能力,感到十分满意。
 升级会员
升级会员 