控制工程基础第3版大作业.docx
《控制工程基础第3版大作业.docx》由会员分享,可在线阅读,更多相关《控制工程基础第3版大作业.docx(15页珍藏版)》请在冰豆网上搜索。
控制工程基础第3版大作业
实验一
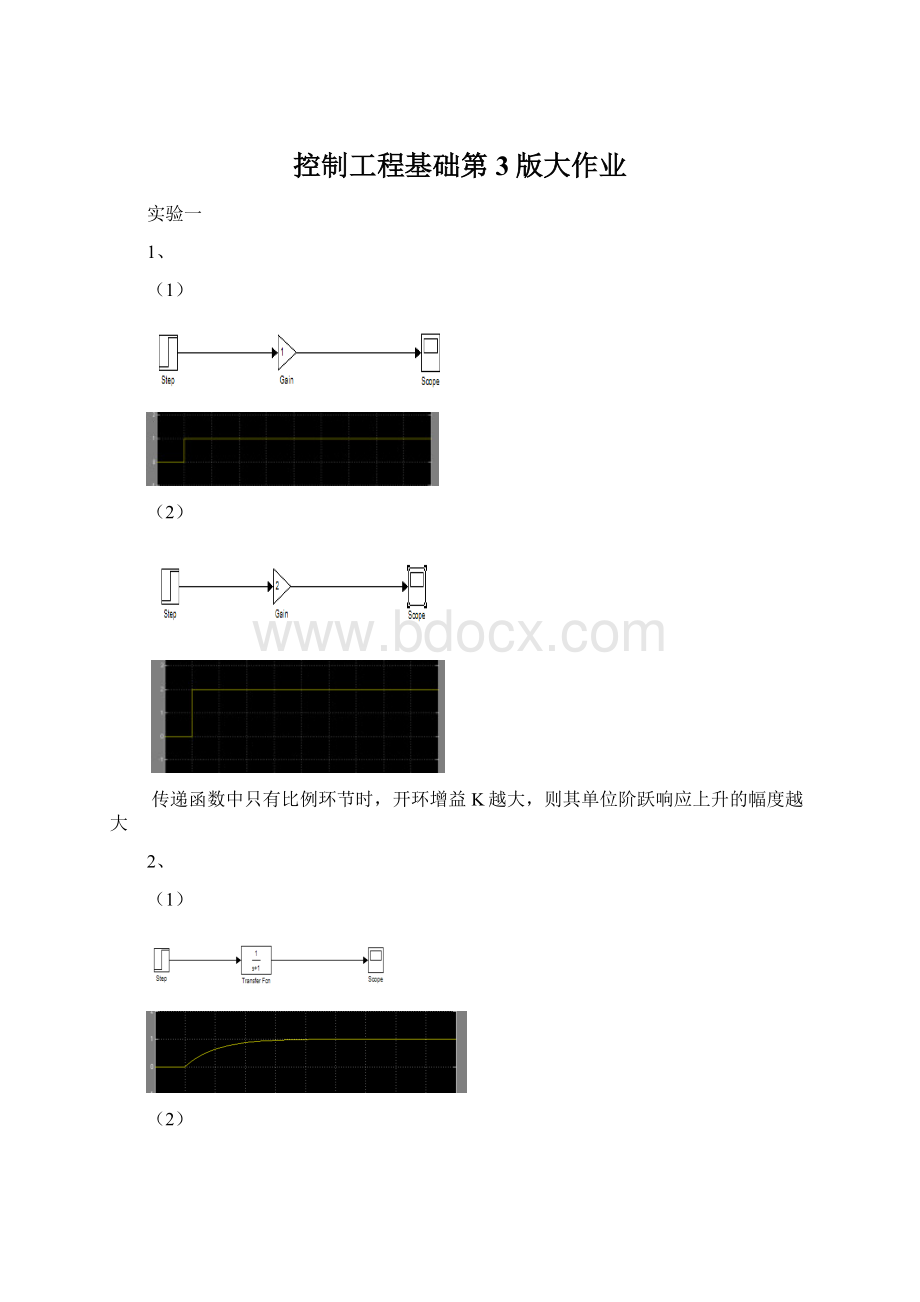
1、
(1)
(2)
传递函数中只有比例环节时,开环增益K越大,则其单位阶跃响应上升的幅度越大
2、
(1)
(2)
由两曲线对比可看出,
(2)中曲线比
(1)中响应更快,因此,惯性环节中T越小,则响应越快,但最终达到的稳定值相同
3、
4、
5、
(1)
(2)
在PD中,若微分环节相同,比例环节不同,则其响应速度相同,但最终达到的稳态值与比例环节K有关,K越大,稳态值越大
6、
(1)
(2)
PI中,积分环节的系数越小,其响应速度越慢,但不影响其稳态值
实验心得与体会:
之前上课的时候,总觉得书上的东西很复杂,难学,但现在突然发现自己也能做出一些系统出来,感觉很兴奋,将实验与平时上课所学到的知识结合起来,对这些知识有了更加深入的认识与了解。
实验二
1、
(1)用step函数,命令为:
num=[00137];den=[14641];t=0:
0.1:
10;
step(num,den,t);grid;title('使用step函数')
(2)使用impulse函数,
因为L[﹠(t)]=1;L[1(t)]=1/s;输出C(S)=G(D)R(S)
要使单位脉冲响应与输入单位阶跃信号时的响应相同,则传递函数分母应乘以s;命令为
num=[000137];den=[146410];t=0:
0.1:
10;
impulse(num,den,t);grid;title('使用impulse函数')
2
(1)命令为:
num=[004];den1=[104];den2=[114];den3=[124];den4=[144];den5=[184];
t=0:
0.1:
10;step(num,den1,t);text(1.08,1.55,'§=0');grid;holdon;
step(num,den2,t);text(1.21,1.28,'§=0.25');holdon;
step(num,den3,t);text(1.15,0.961,'§=0.5');holdon;
step(num,den4,t);text(1.36,0.755,'§=1');holdon;
step(num,den5,t);text(1.3,0.464,'§=2');
从图上可以看出:
§=0时,二阶系统的单位阶跃响应是如图,系统为无阻尼等幅振荡;
0<§<1时,二阶系统的单位阶跃响应是衰减振荡,随着§的减小,其振荡幅度加大;
§=1时,系统没有超调;
§>1时,系统没有超调,且过渡过程时间较长。
§=0.25时的时域性能指标:
从图上可以看出,最大超调量Mp=44.4%,上升时间tr=0.634s,峰值时间tp=1.6s,调节时间ts=7.06s,稳态误差为0
(2)命令行为:
num1=[001];den1=[10.51];t=0:
0.1:
10;
step(num1,den1,t);text(3.18,1.44,'wn=1');grid;holdon;
num2=[004];den2=[114];step(num2,den2,t);
text(1.62,1.44,'wn=2');holdon;
num3=[0016];den3=[1216];step(num3,den3,t);
text(0.793,1.44,'wn=4');holdon;
num4=[0036];den4=[1336];step(num4,den4,t);
text(0.499,1.43,'6')
从图上可看出,wn变化时,超调量不变;但wn变大时,峰值时间、上升时间和调节时间均变小,稳态误差均为零
(3)roots([213510])
ans=
0.7555+1.4444i
0.7555-1.4444i
-1.0055+0.9331i
-1.0055-0.9331i
特征方程有在右半平面的根,故系统不稳定
3、总结判断闭环系统稳定的方法,说明增益K对系统稳定性的影响。
判断稳定性:
a、画出其响应曲线,当t趋于无穷时,系统能达到一个稳定值,则系统稳定
b、系统特征方程的跟全部具有负实部,则系统稳定。
c、开环乃氏图逆时针包围(-1,j0)点的圈数等于其开环右极点的个数,则系统稳定。
d、利用伯德图,如果开环特征多项式没有右半平面的根,且在L(w)大于等于0的所有角频率范围内,相角范围都大于-180度线,则闭环系统稳定
e、相位裕量大于0,则系统稳定。
f、幅值裕量大于1,则系统稳定。
K对系统稳定性影响:
增大K,系统的稳态误差会减小,但其稳定性降低
4、心得体会:
通过做实验,我发现各参数对系统都有影响,在调节系统时,应考虑不同
参数影响的是系统的哪些方面,怎样调整参数才能达到自己的期望值,同时,我觉得应该从整体上把握这些知识,然后融会贯通,这样再碰到一些问题时才不会手忙脚乱,不知道从何下手。
实验三
1、命令行为:
num=[0036];den1=[11.236];w=logspace(-2,3,100);
bode(num,den1,w);gridon;holdon;
den2=[13.636];bode(num,den2,w);holdon;
den3=[1636];bode(num,den3,w);holdon;
den4=[19.636];bode(num,den4,w);holdon;
den5=[12436];bode(num,den5,w);
gtext('0.1');gtext('2');
图中幅频曲线中从上到下,§值分别为0.1,0.3,0.5,0.8,2;
相频曲线[-90,0]范围内,从上到下,§值分别为0.1,0.3,0.5,0.8,2;
§值变化,幅频曲线中的高频段和低频段不变,但中频段,§值越大,曲线越平滑;
对于相频曲线,§越大,相角变化越慢,但曲线都在-90度处相交,最终都趋于-180度
2
(1)命令行为:
s=zpk([],[000.2-5],2);
w=logspace(-2,3,100);
subplot(1,2,1);bode(num,den,w);gridon;title('bode图');
subplot(1,2,2);nyquist(num,den,w);gridon;title('nyquist图');
从伯德图中,剪切频率处对应的相位小于-180度,说明其相位裕量小于0,系统不稳定,
s=zpk([],[000.2-5],2);
t=0:
0.1:
100;
G=s/(1+s);
step(G,t);grid;title('单位阶跃响应曲线')
从绘制出的单位阶跃响应曲线也可看出,曲线是发散的,不稳定。
(2)命令行为:
num=[88];
den1=[11500];den2=[1610];
den=conv(den1,den2);
w=logspace(-2,3,100);
subplot(1,2,1);bode(num,den,w);gridon;title('bode图');
subplot(1,2,2);nyquist(num,den,w);gridon;title('nyquist图');
从伯德图中看出其相位裕量大于0,系统稳定。
单位阶跃响应曲线:
num=[88];
den1=[11500];den2=[1610];
den=conv(den1,den2);
y=tf(num,den);
G=y/(1+y);step(G);grid
最终系统趋于稳定,符合前面所得到的结论
(3)将开环传递函数变为:
1333.3333(s+3)
----------------------
s(s+50)(s+20)(s+10)
则其bode图和nyquist图分别为:
s=zpk([-3],[0-50-20-10],1333.3333);
subplot(1,2,1);bode(s,w);gridon;title('bode图');
subplot(1,2,2);nyquist(s,w);gridon;title('nyquist图');
可看出剪切频率处对应的相位大于-180度,即其相位裕量大于0,则系统稳定。
单位阶跃响应曲线
s=zpk([-3],[0-50-20-10],1333.3333);
y=s/(1+s);step(y);grid
系统稳定,与结论相符
3、命令行为:
s=zpk([-1],[00-10],10);
subplot(1,2,1);bode(s);
subplot(1,2,2);nyquist(s);
[Gm,Pm,Wcg,Wcp]=margin(s)
Gm=
0
Pm=
44.4594
Wcg=
0
Wcp=
1.2647
相位裕量Pm=44.4594>0,故系统稳定
4、频域法分析系统的优点:
时域瞬态响应法是分析空控制系统的直接方法,比较直观,但是不借助计算机时,分析高阶系统非常繁琐。
而频域法是从系统的开环频率特性去分析闭环控制系统的各种特性,而开环频率特性是最容易绘制或通过实验获得的。
系统的频率特性和系统的时域响应之间也存在对应关系,即可以通过系统的频率特性分析系统的稳定性、瞬态性能和稳态性能等。
另外,除了电路与频率特性有着密切关系外,在机械工程中机械振动与频率特性也有着密切关系。
机械受到一定频率的作用力时产生强迫振动,由于内反馈还会引起自激振动。
机械振动学中的共振频率、频谱密度、动刚度、抗振稳定性等概念都可归结为机械系统在频率域中表现的特性。
频域法能简便的建立这些概念。
5、心得与体会:
这次实验使我意识到,在运用各种公式或方法时,一定要注意它的前提条件,如实验2中让画系统开环传递函数的bode图和nyquist曲线,再用单位阶跃曲线来验证,刚开始,我就直接以开环传递函数作为系统的传递函数,画出其阶跃响应曲线,结果和用bode图得到的结论相反,找了很久才发现是前提条件错了,因此一定要吃一堑长一智,下次不能再犯同样的错误了。
实例分析:
温度计的传递函数为1/(TS+1),现在用该温度计测量一个容器内水的温度,发现需要1min的时间才能指示出实际水温的98%的数值,求此温度计的时间常数T;如果给容器加热,使水温以10ºC/min的速度变化,分析其开环增益K变化时对系统稳定性和稳态误差的影响。
解:
4T=1min,T=0.25,则闭环传递函数为4/(S+4)
求开环传递函数,则1/(TS+1)=G(S)/(1+G(S)),算出G(S)=1/TS
将T=0.25代入,则G(S)=4/S
其bode图如下:
s=zpk([],[0],4);
w=logspace(-2,3,100);
bode(s,w);grid
相位裕量=-90-(-180)=90>0,系统稳定
nyquist曲线图:
s=zpk([],[0],4);w=logspace(-2,3,100);
nyquist(s,w);grid
正穿越-负穿越=0=开环右极点数/2,系统稳定
速度响应曲线:
输入为:
R(t)=10t,R(S)=10/S^2,
则输出为:
C(S)=(10/S^2)*(4/(S+4))=40/[S^2*(S+4)],
则
num=40;den=[140];num1=10;den1=[10];t=0:
0.01:
5;
step(num,den,t);text(4.63,43.8,'C(S)');grid;holdon;
step(num1,den1,t);text(3.29,32.9,'R(S)')
综上得出,开环放大倍数增大,则系统稳定性降低,但稳态误差减少
若将开环放大倍数增大,如令K=10,则
G(S)=10/TS=40/S,闭环传递函数为40/(S+40)
Bode图如下:
s=zpk([],[0],40);w=logspace(-2,3,100);
bode(s,w);grid
与K=1相比,其剪切频率右移,本题中相频特性为-90度保持不变,相位裕量也不变,故对稳定性影响较小,但对其他大多数系统来说,剪切频率右移,则稳定性降低。
Nyquist曲线:
s=zpk([],[0],40);w=logspace(-2,3,100);
nyquist(s,w);grid
其图像均为向虚轴两端无限延伸的直线
速度响应曲线:
输出为:
C(S)=(10/S^2)*(40/(S+40))=400/[S^2*(S+40)],则
num=400;den=[1400];num1=10;den1=[10];t=0:
0.01:
5;
step(num,den,t);text(4.63,43.8,'C(S)');grid;holdon;
step(num1,den1,t);text(3.29,32.9,'R(S)')
通过比较可看出,开环增益K变大,则误差减少
 升级会员
升级会员 